三次样条插值(Cubic Spline Interpolation)及代码实现(C语言)
样条插值是一种工业设计中常用的、得到平滑曲线的一种插值方法,三次样条又是其中用的较为广泛的一种。本篇介绍力求用容易理解的方式,介绍一下三次样条插值的原理,并附C语言的实现代码。
1. 三次样条曲线原理
假设有以下节点
1.1 定义
样条曲线![]() 是一个分段定义的公式。给定n+1个数据点,共有n个区间,三次样条方程满足以下条件:
是一个分段定义的公式。给定n+1个数据点,共有n个区间,三次样条方程满足以下条件:
a. 在每个分段区间![]() (i = 0, 1, …, n-1,x递增),
(i = 0, 1, …, n-1,x递增), ![]() 都是一个三次多项式。
都是一个三次多项式。
b. 满足![]() (i = 0, 1, …, n )
(i = 0, 1, …, n )
c. ![]() ,导数
,导数![]() ,二阶导数
,二阶导数![]() 在[a, b]区间都是连续的,即
在[a, b]区间都是连续的,即![]() 曲线是光滑的。
曲线是光滑的。
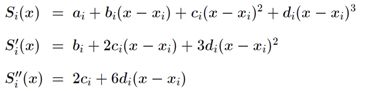
所以n个三次多项式分段可以写作:
![]() ,i = 0, 1, …, n-1
,i = 0, 1, …, n-1
其中ai, bi, ci, di代表4n个未知系数。
1.2 求解
已知:
a. n+1个数据点[xi, yi], i = 0, 1, …, n
b. 每一分段都是三次多项式函数曲线
c. 节点达到二阶连续
d. 左右两端点处特性(自然边界,固定边界,非节点边界)
根据定点,求出每段样条曲线方程中的系数,即可得到每段曲线的具体表达式。
插值和连续性:
![]() , 其中 i = 0, 1, …, n-1
, 其中 i = 0, 1, …, n-1
微分连续性:
![]() , 其中 i = 0, 1, …, n-2
, 其中 i = 0, 1, …, n-2
样条曲线的微分式:

将步长![]() 带入样条曲线的条件:
带入样条曲线的条件:
a. 由![]() (i = 0, 1, …, n-1)推出
(i = 0, 1, …, n-1)推出
![]()
b. 由![]() (i = 0, 1, …, n-1)推出
(i = 0, 1, …, n-1)推出
![]()
c. 由 ![]() (i = 0, 1, …, n-2)推出
(i = 0, 1, …, n-2)推出

由此可得:
![]()
d. 由 ![]() (i = 0, 1, …, n-2)推出
(i = 0, 1, …, n-2)推出
![]()
设![]() ,则
,则
a. ![]() 可写为:
可写为:
![]() ,推出
,推出
![]()
b. 将ci, di带入 ![]() 可得:
可得:
![]()
c. 将bi, ci, di带入![]() (i = 0, 1, …, n-2)可得:
(i = 0, 1, …, n-2)可得:
![]()
端点条件
由i的取值范围可知,共有n-1个公式, 但却有n+1个未知量m 。要想求解该方程组,还需另外两个式子。所以需要对两端点x0和xn的微分加些限制。 选择不是唯一的,3种比较常用的限制如下。
a. 自由边界(Natural)
首尾两端没有受到任何让它们弯曲的力,即![]() 。具体表示为
。具体表示为![]() 和
和 ![]()
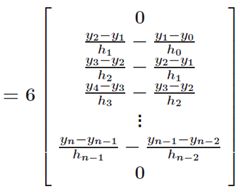
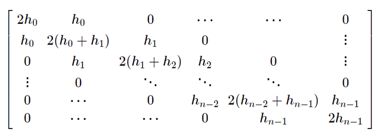
则要求解的方程组可写为:

b. 固定边界(Clamped)
首尾两端点的微分值是被指定的,这里分别定为A和B。则可以推出

将上述两个公式带入方程组,新的方程组左侧为
c. 非节点边界(Not-A-Knot)
指定样条曲线的三次微分匹配,即
![]()
![]()
根据![]() 和
和![]() ,则上述条件变为
,则上述条件变为
![]()
![]()
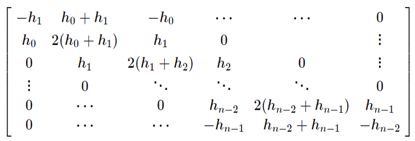
新的方程组系数矩阵可写为:
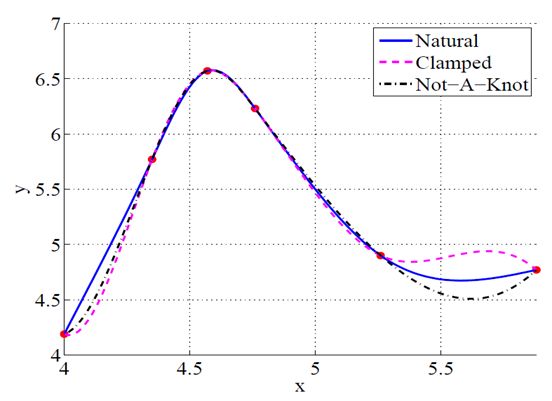
右下图可以看出不同的端点边界对样条曲线的影响:
1.3 算法总结
假定有n+1个数据节点
![]()
a. 计算步长![]() (i = 0, 1, …, n-1)
(i = 0, 1, …, n-1)
b. 将数据节点和指定的首位端点条件带入矩阵方程
c. 解矩阵方程,求得二次微分值![]() 。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。
。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。
d. 计算样条曲线的系数:

其中i = 0, 1, …, n-1
e. 在每个子区间![]() 中,创建方程
中,创建方程
![]()
2. C语言实现
用C语言写了一个三次样条插值(自然边界)的S-Function,代码如下:


#define S_FUNCTION_NAME cubic
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#include "malloc.h" //方便使用变量定义数组大小
static void mdlInitializeSizes(SimStruct *S)
{
/*参数只有一个,是n乘2的定点数组[xi, yi]:
* [ x1,y1;
* x2, y2;
* ..., ...;
* xn, yn;
*/
ssSetNumSFcnParams(S, 1);
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) return;
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 0);
if (!ssSetNumInputPorts(S, 1)) return; //输入是x
ssSetInputPortWidth(S, 0, 1);
ssSetInputPortRequiredContiguous(S, 0, true);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S, 1)) return; //输出是S(x)
ssSetOutputPortWidth(S, 0, 1);
ssSetNumSampleTimes(S, 1);
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
ssSetSimStateCompliance(S, USE_DEFAULT_SIM_STATE);
ssSetOptions(S, 0);
}
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
}
#define MDL_INITIALIZE_CONDITIONS
#if defined(MDL_INITIALIZE_CONDITIONS)
static void mdlInitializeConditions(SimStruct *S)
{
}
#endif
#define MDL_START
#if defined(MDL_START)
static void mdlStart(SimStruct *S)
{
}
#endif /* MDL_START */
static void mdlOutputs(SimStruct *S, int_T tid)
{
const real_T *map = mxGetPr(ssGetSFcnParam(S,0)); //获取定点数据
const int_T *mapSize = mxGetDimensions(ssGetSFcnParam(S,0)); //定点数组维数
const real_T *x = (const real_T*) ssGetInputPortSignal(S,0); //输入x
real_T *y = ssGetOutputPortSignal(S,0); //输出y
int_T step = 0; //输入x在定点数中的位置
int_T i;
real_T yval;
for (i = 0; i < mapSize[0]; i++)
{
if (x[0] >= map[i] && x[0] < map[i + 1])
{
step = i;
break;
}
}
cubic_getval(&yval, mapSize, map, x[0], step);
y[0] = yval;
}
//自然边界的三次样条曲线函数
void cubic_getval(real_T* y, const int_T* size, const real_T* map, const real_T x, const int_T step)
{
int_T n = size[0];
//曲线系数
real_T* ai = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* bi = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* ci = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* di = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* h = (real_T*)malloc(sizeof(real_T) * (n-1)); //x的??
/* M矩阵的系数
*[B0, C0, ...
*[A1, B1, C1, ...
*[0, A2, B2, C2, ...
*[0, ... An-1, Bn-1]
*/
real_T* A = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* B = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* C = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* D = (real_T*)malloc(sizeof(real_T) * (n-2)); //等号右边的常数矩阵
real_T* E = (real_T*)malloc(sizeof(real_T) * (n-2)); //M矩阵
real_T* M = (real_T*)malloc(sizeof(real_T) * (n)); //包含端点的M矩阵
int_T i;
//计算x的步长
for ( i = 0; i < n -1; i++)
{
h[i] = map[i + 1] - map[i];
}
//指定系数
for( i = 0; i< n - 3; i++)
{
A[i] = h[i]; //忽略A[0]
B[i] = 2 * (h[i] + h[i+1]);
C[i] = h[i+1]; //忽略C(n-1)
}
//指定常数D
for (i = 0; i=0; i--)
{
X[i] = D[i] - C[i] * X[i+1];
}
}
#define MDL_UPDATE
#if defined(MDL_UPDATE)
static void mdlUpdate(SimStruct *S, int_T tid)
{
}
#endif
#define MDL_DERIVATIVES
#if defined(MDL_DERIVATIVES)
static void mdlDerivatives(SimStruct *S)
{
}
#endif
static void mdlTerminate(SimStruct *S)
{
}
#ifdef MATLAB_MEX_FILE
#include "simulink.c"
#else
#include "cg_sfun.h"
#endif
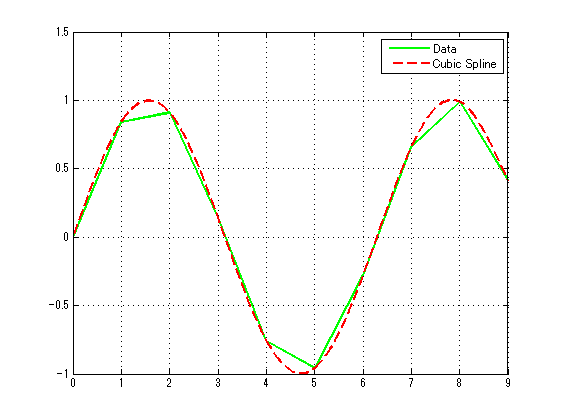
3. 例子
以y=sin(x)为例, x步长为1,x取值范围是[0,9]。对它使用三次样条插值,插值前后对比如下: