手眼标定学习记录(更新)
一、Eigen中quaternion的构造函数
Quaternion (const Scalar &w, const Scalar &x, const Scalar &y, const Scalar &z),注意w在前。然而在内部存储时eigen将四元数的w放在最后
例如通过Eigen::Vector4d q = q_AB.coeffs();访问时,q中的最后一个元素才是w。
Eigen中用四元数表示向量的旋转
Quaternion:
| Eigen::Quaterniond q(2, 0, 1, -3); std::cout << “This quaternion consists of a scalar ” << q.w() << ” and a vector ” << std::endl << q.vec() << std::endl; q.normalize(); std::cout << “To represent rotation, we need to normalize it such that its length is ” << q.norm() << std::endl; Eigen::Vector3d v(1, 2, -1); Eigen::Quaterniond p; p.w() = 0; p.vec() = v; Eigen::Quaterniond rotatedP = q * p * q.inverse(); Eigen::Vector3d rotatedV = rotatedP.vec(); std::cout << “We can now use it to rotate a vector ” << std::endl << v << ” to ” << std::endl << rotatedV << std::endl; |
| Eigen::Matrix3d R = q.toRotationMatrix(); // convert a quaternion to a 3x3 rotation matrix std::cout << “Compare with the result using an rotation matrix ” << std::endl << R * v << std::endl; |
| Eigen::Quaterniond a = Eigen::Quterniond::Identity(); Eigen::Quaterniond b = Eigen::Quterniond::Identity(); Eigen::Quaterniond c; // Adding two quaternion as two 4x1 vectors is not supported by the EIgen API. That is, c = a + b is not allowed. We have to do this in a hard way c.w() = a.w() + b.w(); c.x() = a.x() + b.x(); c.y() = a.y() + b.y(); c.z() = a.z() + b.z(); |
要输出Eigen形式的四元数,并且由Eigen::Affine转化,或者是由Eigen::matrix转化方法
Eigen::Transform resultAffine(result);//其中result的类型是Eigen::matrix.实现的是从Eigen::matrix到Eigen::Affine类型的转换
Eigen::Quaternion Target_Quaternion(Target_Pose.rotation());
std::stringstream ss;
ss<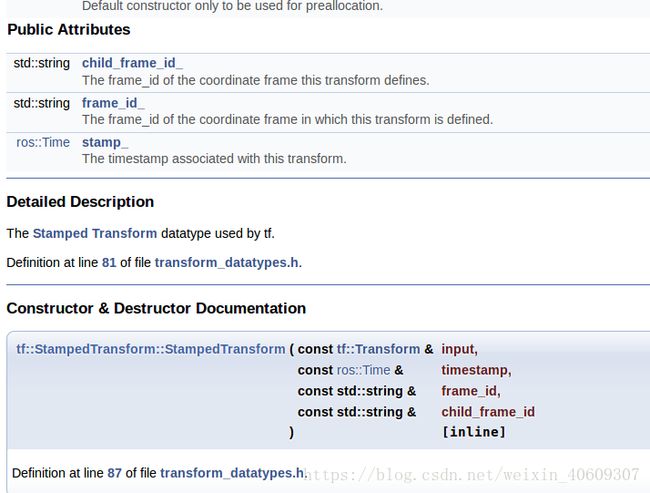
tf::StamptedTransform(),对于参数,相当于
frame_id=father
child_frame_id=child
frame_id->child_frame_id
date form child_frame to frame_id
the origin coordination of child_frame_id in frame_id

tf::lookupTransform(),相当于
target_frame=father
source_frame=child
target_frame->source_frame
date from source_frame to target_frame
the origin coordination of source_frame in target_frame

solvepnp相当于
camera frame=father
world frame=child
camera frame->world frame
data from world frame to camera frame
the origin coorfination of world frame in camera frame
与相机的外参正好相反,外参需要的是将相机坐标系下的点转到世界坐标系下,即data from camera frame to world frame
注意!!
python接口中
br.sendTransform(child_frame, father_frame)
与c++的接口或者说与tf::StampedTransform()形参的位置有所不同,后者的参数是(father_frame,child_frame)
因此,对于python接口来说,假设
br.sendTransform((0.0, 2.0, 0.0),
(0.0, 0.0, 0.0, 1.0),
rospy.Time.now(),
"carrot1",
"turtle1")
相当于:
turtle1=father
carrot1=child
turtle1->carrot1
data from carrot1 frame to turtle1
the origin coorfination of carrot1 in turtle1
在传入位姿信息时,需要传入的是Eigen类型的Quaternion和position作为姿态和位置信息,最好不要转换为tf类型的数据,会出现莫名的错误。
对于Eigen::Affine3d来说,除了上述直接得到Eigen::Quaternion之外,也可以通过
std::cerr << "the target translation eigen type x,y,z= "<
得到位姿矩阵的位置信息,返回其x,y,z值用于传入Target_Pose.Position.x,y,z
手眼标定ros包的安装
根据github的readme,手眼标定,需要安装的额外扩展包有三个,分别是gflags,glog,ceres-solver,在github上有对应的源码可下载
在编译过程中,gflags,glog的安装方法按照源码中的方法安装,在安装过程中,可能会遇到错误
/usr/local/lib/libgflags.a: error adding symbols: Bad value collect2: error: ld returned 1 exit status
类似的问题很多,大多是在移植到64位系统时,某个库文件没有编译成为动态库,解决方案是:
如果错误的库是通过源码安装,那么进入源码后,在 cmake ..之前加上
export CXXFLAGS="-fPIC" && cmake .. && make VERBOSE=1
如果是通过./configure文件进行配置,则需要输入
./configure --disable-shared -with-pic
如果可以在makefile文件中,或者是CMakeList.txt文件中找到g++或者gcc的编译flags选项加上-fPIC,参考见https://www.cnblogs.com/laodageblog/p/5993742.html
在glog的编译过程中如果出现上述问题无法解决,可以不按照官方方法,而是按照标准操作,即
mkdir build && cd build
cmake ..
make
sudo make install
对于ceres-solver来说,方法同上。
三.Eigen与TF的关系
3.1 Eigen各种旋转的初始化与定义
//角向量表示旋转
Eigen::AngleAxisd rotation_vector(1.57, Eigen::Vector3d(0.5, 0.25, 0.13));
//通过角向量转化为四元数
Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector);
//输出四元数
std::cout<< q.coeffs() << std::endl << std::endl;
//通过角向量转化为旋转矩阵
Eigen::Matrix3d rotation_matrix = rotation_vector.toRotationMatrix();
std::cout << rotation_vector.matrix() << std::endl << std::endl;
//建立3*1矩阵
Eigen::Vector3d translation_vector (1.5, 2.5, 1.8);
//使用vector矩阵来初始化Eigen::Translation3d对象,后者用于Eigen::Affine3d的初始化
Eigen::Translation3d tl(translation_vector);
//Eigen::Affine3d初始化,方法为Eigen::Translation3d对象(对应的Position)乘上旋转矩阵(对应的rotation)构成4*4的齐次矩阵
Eigen::Affine3d transform;
transform = tl * rotation_matrix;
std::cout << transform.matrix() << std::endl << std::endl;
3.2 TF各种变量的初始化
除去包含与头文件#include 下,位于tf命名空间下的eigen,tf,msg之间的转换函数,对于tf各种变量的初始化如下:
//tf中的vector3的初始化,其中translation_vector是上述Eigen::trnaslation3d变量
tf::Vector3 tfv(translation_vector(0), translation_vector(1), translation_vector(2));
//对之前Eigen::Quaternion生成的四元数进行归一化处理
double norm = sqrt(q.x()*q.x() + q.y()*q.y() + q.z()*q.z() + q.w()*q.w());
q.x() = q.x() / norm;
q.y() = q.y() / norm;
q.z() = q.z() / norm;
q.w() = q.w() / norm;
//归一化后通过()直接赋值,注意x,y,z,w的位置
tf::Quaternion tfq(q.x(), q.y(), q.z(), q.w());
//下面一行是指之前提到的在tf下的转换函数
tf::transformEigenToTF(transform, tf);
//通过之前的tf::vector3与tf::Quaternion对象来初始化tf::Transform对象,注意前后顺序
tf::Transform tf(tfq, tfv);
//输出各种信息
std::cout << tfq.getX() << " " << tfq.getY() << " " << tfq.getZ() << " " << tfq.getW() << std::endl << std::endl;
std::cout << "tf type position: " << tf.getOrigin().getX() << " " << tf.getOrigin().getY() << " " << tf.getOrigin().getZ() << " " << std::endl << std::endl;
std::cout << "tf type rotation: " << tf.getRotation().getX() << " " << tf.getRotation().getY() << " " << tf.getRotation().getZ() << " " << tf.getRotation().getW() << std::endl << std::endl;
注意:上述变量的转换有几个注意事项:
1.对于Eigen::Quaternion初始化,例如之前通过角向量来生成的四元数,并没有归一化
但是传入tf向量的四元数,必须进行归一化,同样的道理,对于Moveit的group.setposetarget()的Pose中的orientation,必须传入归一化后的四元数,不然会错误运动!!!!
2.在输出tf的rotation值时,orientation的w值通过tf.getRotation().getW()即可,而对于x,y,z来说,tf.getRotation.getAxis.getX()的值有一定的错误,对于y,z同理,要想输出一样的结果需要的是tf.getRotation.getX()即可.
四.错误记录
在将从摄像头到底座的坐标变换发送到tf树的过程中,因为要从指定路径中去读取之前手眼标定得到的结果x,所以需要在launch文件中声明读取的文件路径
在程序中,参数服务器里面的参数只是记录了需要读取的文件的名字,因此在声明ros::NodeHandle时,必须给他赋初值,即
ros::NodeHandle nh("~");
才能保证launch文件中,能够根据value设定的参数路径找到路径
如果找到了路径,下面的代码输出的位置应该是~/kinova_ws/....TransformPairsInput.yml,前者是在上述launch文件中声明的value值,如果最初ros::NodeHandle没有初始化,则最终输出的结果只有TransformPairsInput.yml,没有到对应的路径去找这个文件,相当于launch文件没有发生作用!
nh.param("A_B_transform_pairs_record_filename", transformPairsRecordFile,
std::string("TransformPairsInput.yml"));
std::cerr << "loading BasetoTip and CameraToAr frame: " << transformPairsRecordFile
<< "\n";