机器人运动控制-水下机器人
文章目录
- 1背景
- 2PCE体系结构
- 3感知层
-
- 3.1水下机器人动力学模型
- 3.2目标指令理解
- 4控制层
-
- 4.1神经网络搭建
- 5水下机器人执行层技术
- 6水下机器人运动控制系统
1背景
水下机器人运动控制体系由三个部分组成数据处理部分、控制算法、推力分配
数据处理通过采用不同的滤波方式,把从传感器传来的信息通过滤波处理、剔除野点来获取平滑数据,同时还可以根据位置信息推算出速度,加速度等
控制算法部分,通过采用不同的控制器的设计来实现,获取水下机器人各个自由度上所需要提供的推力矩
分配器包括将各个自由度的推力分配到每个执行器上以及执行器所发出的力与指令之间的转换

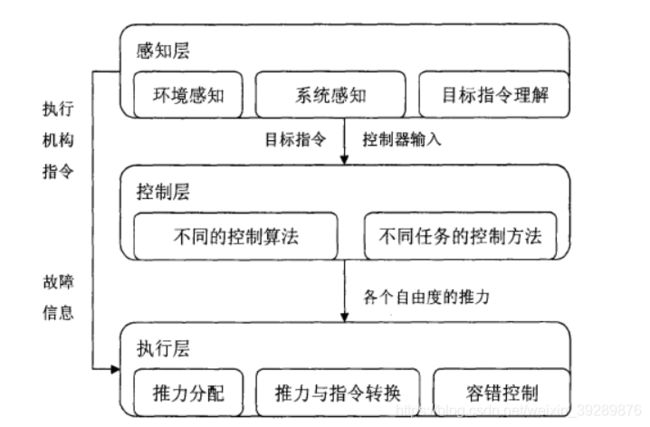
运动控制系统分为感知层、控制层以及执行层三层。其中感知层包括环境危险的感知避障、对水下机器人运动状态以及水下环境的理解、对于上层规划系统指令的分析、水下机器人的故障信息感知等。在控制层中,采用智能控制技术设计了水下机器人的运动控制器,研究神经网络与其它控制算法相结合的控制器结构和学习算法,探讨适应于水下机器人的运动控制理论。在执行层中,针对各种复杂的执行器系统,通过分析各种执行器系统的水动力性能,设计了合适的推力分配策略
2PCE体系结构
运动控制系统的体系结构分为三层,这三层不仅包含了软件体系结构,同时也包括了硬件体系结构,分别为感知层(preception layer)、控制层(control layer)和执行层(executive layer),简称水下机器人PCE运动控制体系结构。
感知层是水下机器人获取外部知识以及目标指令的窗口,包括对水下机器人的系统资源、动力性能、周围环境以及目标指令的感知与理解。它依赖水下机器人搭载的各种传感器包括速度传感器、位置传感器、姿态传感器、定高传感器、流传感器等来获取水下机器人的运动信息以及水下机器人的周围环境信息,同时采用一定的滤波算法来处理水下机器人获得的原始传感器信息。另外针对各种上层结构如规划控制系统或者人为指令,感知层根据水下机器人当前的运动状态信息以及环境理解对目标指令进行理解,在综合考虑水下机器人运动能力的基础上提供信息给控制层。同时感知层具有对水下机器人自身和周围环境信息的理解能力,针对某些紧急、故障处理等行为,如果将指令下达给控制层后再驱动执行结构会导致指令的滞后,在这种极其危险情况下最重要的己经不是控制器的稳定性,而是水下机器人的安全问题,针对这些情况,感知层采用行为响应的办法直接操作和控制执行层的元件。
控制层的作用是根据从感知层获得的运动目标信息、自身运动信息采用一定的算法来获取水下机器人各个自由度上执行结构所应该提供的推力,并将该推力指令发送给执行层,从而完成上层系统所规划或人为指定的各种目标路径
执行层的作用是将控制层的推力分配到各个执行机构上,并驱动执行机构使其发出运动所需要的力。另外执行层也可以在不需要控制层参与的情况下,直接执行感知层的指令来应对各种紧急情况
简要来说是控制层受到感受层信息作出控制算法,来驱动执行层。但是在危险和特低情况下,感知层可以直接操作执行层。
3感知层
感知层技术包括环境与系统信息的获取与处理、知识的抽象与表达、联想与推理等,是外界事物在水下机器人“头脑”里的反映,是水下机器人对自身任务和系统环境的一种认知,通常分为离线感知技术和在线感知技术,而后者则是了水下机器人的自主能力和思考能力的体现。
感知层技术是针对水下机器人运动控制系统体系结构来说的
通过环境与运动状态感知、目标指令理解、系统性能感知三个方面来完善系统
其中环境感知体现了水下机器人的非条件反射行为目标指令感知是水下机器人对于上层指令的分析理解系统性能感知是其对自身系统状态的认知,也是进行故障诊断的一个依据,使得水下机器人在发生故障之后能够采取合理的控制模式,保障水下机器人的安全或在安全的前提下完成任务。
3.1水下机器人动力学模型
有两个坐标系与水下机器人的运动有关,它们分别被称为大地坐标系和艇体坐标系。大地坐标系又被称为地球坐标系或惯性坐标系,它被定义为以地球表面上任意一点为原点的三个正交的轴,其中,X轴指向正北、Y轴指向正东、轴指向深度增加的方向,它们遵循右手定则.
艇体坐标系定义在水下机器人上,它的三个轴分别是纵轴指向艇舷方向,横轴指向艇体的右侧,竖轴指向艇体的底部。
3.2目标指令理解
遥控水下机器人指令的通常是通过上位机与下位机的通讯由操作人员下达,预编程水下机器人则通过将水面控制机的控制台上编制好的程序直接下装到预编程水下机器人载体计算机中。遥控式水下机器人与预编程水下机器人相对而言都有具体操作人员的参与,因此操作人员的指令往往直接作为其运动控制系统的目标指令。而自主型智能水下机器人由于目标指令往往都是根据任务需要并通过分解任务获得的,通常都没有考虑到水下机器人当前的运动能力以及运动需求,正如在获得潜浮的目标指令时,如果不考虑当前水下机器人的纵向运动速度,则不能以最优的方式来实现潜伏运动。
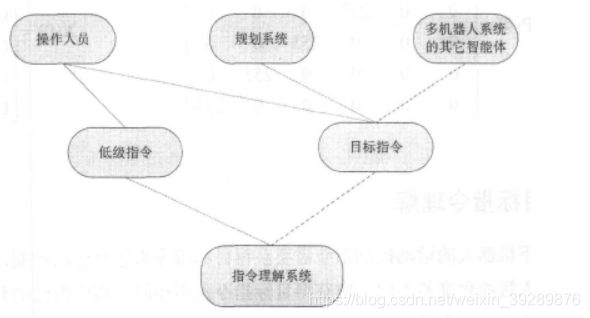
简单来说操作人员可以发出简单指令和目标指令两种指令,其中简单指令机器人的理解系统接直接理解并作出动作,而目标指令需要通过规划系统和多机器人系统和其他智能体分解任务。指令理解系统对其理解并作出动作。例如过弯,需要声呐配合不停接受发送信息最后完成动作。
4控制层
其目的是根据从感知层所获得的运动目标信息、自身运动信息通过一定的算法来获得水下机器人各个自由度上执行机构所应该提供的推力
在深水中、近海底或靠近障碍物时,其所受到的水动力各不相同。复杂的海洋环境有风、浪和流,对于深水航行
的水下机器人来说,尽管风和浪一般不加以考虑,但海流的影响是很大的。总之,水下机器人是一个强非线性系统,而且考虑到运动的时变性、环境的复杂性和不确定性,建立精确的水下机器人运动模型是不可能的
所以,水下机器人控制系统的设计必须考虑非线性问题和水下机器人运动耦合问题,同时从加强机器人的自主性与适应性,从改善水下机器人工作性能的观点来看,控制系统还应该具备良好的自适应与自学习能力
4.1神经网络搭建
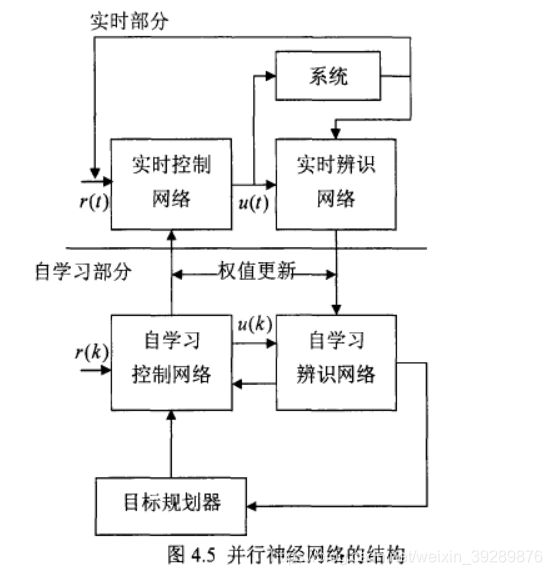
我们将目标规划器所获得的期望加速度作为控制网络的输入输入层、隐含层、输出层分别包含2个,6个,1个神经元.输出则是作用在水下机器人上的各个自由度上的力。为了保证控制网络的稳定性,在传感器由无数据到有数据状态变化的那个节拍自学习部分和实时部分的网络权值不进行同步更新
5水下机器人执行层技术
1针对不同推力器的布置方式造成的推力分配的复杂性,建立合理的推力分配逻辑
2针对采用舵、翼等多种执行机构时,舵、翼等执行结构与推力器之间推力分配方案选择,以及在推力器与舵翼执行器之间相互转换时采取的处理方法
3针对某个执行器出现故障情况时而执行器系统仍有冗余情况下的推力重新分配。
6水下机器人运动控制系统
