受限玻尔兹曼机(RBM)+对比散度算法(CD-k)
受限玻尔兹曼机(RBM)+对比散度算法(CD-k)
- 主要内容:
- 受限玻尔兹曼机(RBM)基本原理
- 受限玻尔兹曼机(RBM)训练过程——对比散度算法(CD-k)
1. 受限玻尔兹曼机(RBM)基本原理
受限玻尔兹曼机(RBM)是一种典型的神经网络模型,由一层可视层 v 和一层隐藏层 h 组成,该网络的可视层 v 和隐藏层 h 神经元彼此互联,但同一层内神经元无连接,如图1。RBM能够通过隐藏层获得可视层神经元的高阶相关性,因此可以通过RBM进行特征提取。RBM中神经元有两种状态:“激活”和“未激活”,一般用二进制的1和0表示。受限玻尔兹曼机一个最主要的优点是在给定可视层神经元状态时,隐藏层某一神经元的状态是条件独立于该隐藏层其它神经元的状态;反之,各个可视层神经元的状态亦条件独立。
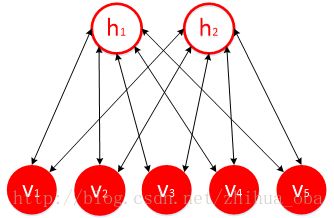
图1 RBM模型
受限玻尔兹曼机是一种基于能量的模型,可视层神经元向量 v 和隐藏层神经元向量 h 联合配置的能量函数为:
联合似然为:
条件似然函数为:
隐藏层各神经元的条件概率为:
可视层各神经元的条件概率为:
若 b , c , W 均为训练好的参数。对于样本集中任意一个样本点 xi=(xi,1,xi,2,...,xi,n) (n为属性个数),其属性值 xi,j 对应可视层神经元 vj 。根据公式(1-4),将样本点 xi 所有属性值代入公式(1-4),可得特征提取后的样本点 x′i 。
接下来介绍如何对RBM进行训练得到参数 b , c , W 。
2. 受限玻尔兹曼机(RBM)训练过程——对比散度算法(CD-k)
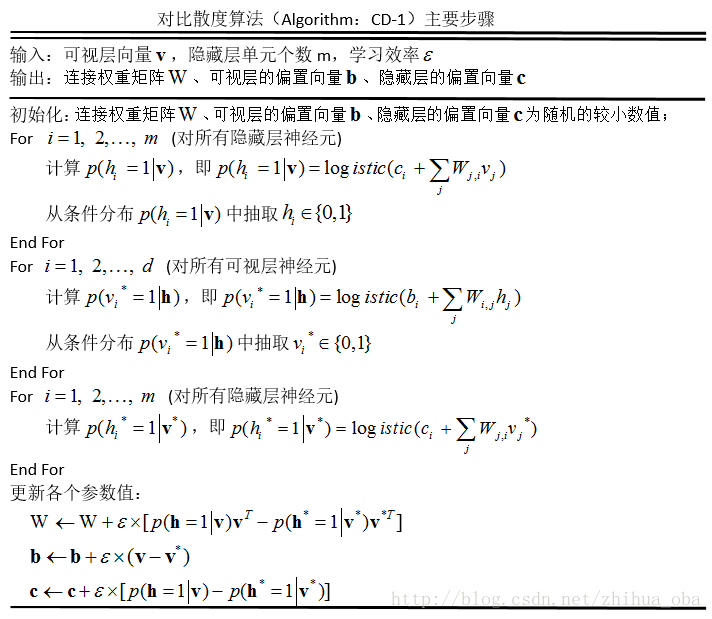
学习RBM的任务是求出参数的值,来拟合给定的训练数据。Hinton[1]提出了RBM的一个快速学习算法,即对比散度(Contrastive Divergence,CD)。由于CD-k算法中(k表示采样次数),当k=1时,即只进行一步吉布斯采样,就能达到很好的拟合效果[2]。故一般采用CD-1算法的形式,来拟合各参数的值,如图2。

图2 CD-1
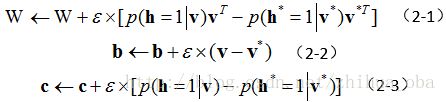
设可视层 v 的重构(reconstruction)为 v∗ ,根据重构的可视层 v∗ 所得隐藏层为 h∗ 。设学习效率为 ε ,经过对比散度算法对RBM进行训练后,权重矩阵 W 、可视层的偏置向量 b 、隐藏层的偏置向量 c ,根据文献[1][3],更新规则如下:
RBM的对比散度算法主要步骤:根据训练集中样本点设置可视层神经元 v 激活状态,根据公式(1-4)计算所有隐藏层神经元状态;在隐藏层各神经元的状态 h 确定之后,根据公式(1-5)计算在隐藏层确定的情况下,所有可视层神经元的状态,从而产生可视层的一个重构 v∗ ;如果此时 v 和 v∗ 一样,那么得到的隐藏层 h 就是可视层 v 的另外一种表达,此时隐藏层可以作为可视层输入数据的特征。同时在训练中,可以利用可视层的状态与重构可视层的状态的误差来调整RBM的参数,从而使得 v 和 v∗ 的重构误差尽可能减小。
对于初学者来讲,在训练RBM的过程中,并不了解如何根据样本点 xi=(xi,1,xi,2,...,xi,n) (n为属性个数)来设置对应可视层 v 的状态,以及如何设置隐藏层神经元的状态。此处提供一种常用的方法,并做简要说明:
对于训练集 S 中所有样本点 (x1,x2,...,xN) (N为训练样本点的个数),计算在第 j 个属性下所有样本点的最大值 maxi∈N(xi,j) ,以及最小值 mini∈N(xi,j) ,当 xi,j−mini∈N(xi,j)maxi∈N(xi,j)−mini∈N(xi,j) 大于阈值 δj,1 时,则对应可视层神经元状态处于激活状态,即“1”,否则为“0”。将可视层神经元状态值,此时只有“0”和“1”,代入至公式(1-4),得到隐藏层神经元的激活概率,当激活概率大于阈值 δj,2 时,隐藏层神经元的状态值为“1”,否则为“0”。阈值 δj,1 , δj,2 的设定,可以根据数据集的不同有所不同,亦或是随机产生[0,1]上的随机数,作为 δj,1 , δj,2 的值。
关于对比散度算法中,相关参数的设置,文献[3]给出了一些初步的方法,感兴趣的小童鞋,可以了解一下。
- 参考文献:
[1] Hinton G E. Training products of experts by minimizing contrastive divergence[J]. Neural Computation, 2002, 14(8):1771-1800.
[2] Bengio Y. Learning Deep Architectures for AI[J]. Foundations & Trends® in Machine Learning, 2009, 2(1):1-127.
[3] 张春霞, 姬楠楠, 王冠伟. 受限波尔兹曼机?[J]. 工程数学学报, 2015(2):159-173.