Linux-4.1.15移植(一)
一:添加开发板配置文件
/arch/arm/configs目录下创建“imx_my_emmc_defconfig”配置文件

二:添加开发板设备树文件
/arch/arm/boot/dts目录下创建“imx6ull-my-emmc.dts”设备树文件
同目录下Makefile中“CONFIG_SOC_IMX6ULL”一栏添加设备树文件:“imx6ull-my-emmc.dtb”
dtb-$(CONFIG_SOC_IMX6ULL) += \
imx6ull-14x14-ddr3-arm2.dtb \
imx6ull-14x14-ddr3-arm2-adc.dtb \
imx6ull-14x14-ddr3-arm2-cs42888.dtb \
imx6ull-14x14-ddr3-arm2-ecspi.dtb \
imx6ull-14x14-ddr3-arm2-emmc.dtb \
imx6ull-14x14-ddr3-arm2-epdc.dtb \
imx6ull-14x14-ddr3-arm2-flexcan2.dtb \
... ...
imx6ull-my-emmc.dtb \
... ...三:修改CPU主频
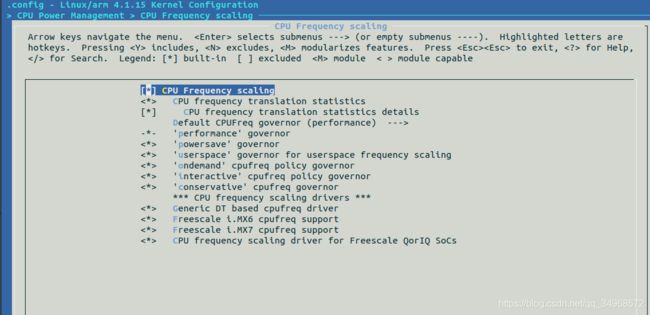
1、Linux内核一共有5种调频策略
(1):Performance,最高性能,直接用最高频率,不考虑耗电。
(2):Interactive,一开始直接用最高频率,然后根据 CPU负载慢慢降低。
(3):Powersave,省电模式,通常以最低频率运行,系统性能会受到影响,一般不用。
(4):Userspace,可以在用户空间手动调节频率。
(5):Ondemand,定时检查负载,然后根据负载来调节频率。负载低的时候降低 CPU频率,
这样省电,负载高的时候提高 CPU频率,增加性能。
2、修改方法
(1):修改配置文件xxx_defconfig
... ...
CONFIG_CPU_FREQ_GOV_POWERSAVE=y
CONFIG_CPU_FREQ_GOV_USERSPACE=y
CONFIG_CPU_FREQ_GOV_ONDEMAND=y
CONFIG_CPU_FREQ_GOV_CONSERVATIVE=y
... ...(2):图形界面配置
3、CPU频率修改
按照需求修改imx6ull.dtsi文件中对应参数即可
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
clock-latency = <61036>; /* two CLK32 periods */
operating-points = <
/* kHz uV */
996000 1275000
792000 1225000
528000 1175000
396000 1025000
198000 950000
>;
fsl,soc-operating-points = <
/* KHz uV */
996000 1175000
792000 1175000
528000 1175000
396000 1175000
198000 1175000
>;修改完毕后执行“make dtbs”命令编译设备树即可。
四:使能8路EMMC驱动
由系统配置的设备树文件“imx6ull-14x14-evk.dts”可以看到linux驱动默认为4路emmc。
/* imx6ull-14x14-evk.dts */
&usdhc1 {
pinctrl-names = "default", "state_100mhz", "state_200mhz";
pinctrl-0 = <&pinctrl_usdhc1>;
pinctrl-1 = <&pinctrl_usdhc1_100mhz>;
pinctrl-2 = <&pinctrl_usdhc1_200mhz>;
cd-gpios = <&gpio1 19 GPIO_ACTIVE_LOW>;
keep-power-in-suspend;
enable-sdio-wakeup;
vmmc-supply = <®_sd1_vmmc>;
status = "okay";
};
&usdhc2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usdhc2>;
non-removable;
status = "okay";
};修改自己创建的设备树配置文件“usdhc2”属性:
/* imx6ull-my-emmc.dts */
#include "imx6ull-14x14-evk.dts"
&usdhc2 {
pinctrl-names = "default", "state_100mhz", "state_200mhz";
pinctrl-0 = <&pinctrl_usdhc2_8bit>;
pinctrl-1 = <&pinctrl_usdhc2_8bit_100mhz>;
pinctrl-2 = <&pinctrl_usdhc2_8bit_200mhz>;
bus-width = <8>;
non-removable;
status = "okay";
};