s调irs
- 最佳的最大似然检测器和低复杂度的压缩传感检测器。
一、调制方案
所有方案均为单输出多输入(SIMO)。一个发射机TA,两个IRS, N R N_R NR个接收机RA。每个IRS有一个或多个反射面RS,每个反射面(RS)有多个原件。

三种方案的流程:
- (1)IRS1选择性的激活IRS2中的某个元件
1)输入的比特序列分为两部分。第一部分选择用传统的PSK/QAM符号,第二部分利用波束索引调制。
2)TA与IRS1保持靠近。他们彼此进行优先和无线的链接。序列第一部分PSK/QAM的选择由发射机进行选择,并通过无线的方式发送到IRS1的RS。
3)有线连接用于将序列第二部分映射为波束索引调制。这部分通过适当改变相位,将信号发送到IRS1的RS上。
4)基于接受的相位向量,IRS1的元件可将入射信号调整为所需的相移,之后发送到IRS2。相位是特殊调整的,以确保仅有期望的IRS2的元件接受到信号。这种特殊选择为索引调制保留了信息位。
5)IRS2反射信号(有或没有相移根据方案的选择)。并由RA接受信号。RA的信息检测包含传统的PSK/QAM符号及IRS2的特定元素索引反射的符号。这是由 N R N_R NR个RA共同完成的。
对于细节有如下假设:
1)发射机到IRS1的距离非常小。因此信道为噪声可忽略的高斯信道。
2)IRS1和IRS2直接仅有LOS路径。这种假设是合理的,因为两个反射面共在一个封闭空间,IRS1的元件通过调整相位,特殊的选择IRS2的元件进行接受。因此,假设IRS1和IRS2也假设为高斯信道。
3)在IRS2和接收端之间假设为平坦衰落的瑞利信道。信道系数根据 C N ( 0 , 1 ) \mathcal {CN}(0,1) CN(0,1)。
A方案1:单符号索引调制
在这个方案中,两个IRS均有单个RS。IRS1与IRS2相距为D。IRS1有 ( N 1 H × N 1 W ) (N_{1H}\times N_{1W}) (N1H×N1W)个元件,IRS2有 ( N 2 H × N 2 W ) (N_{2H}\times N_{2W}) (N2H×N2W)个元件。 N 1 a n d N 2 N_1\ and\ N_2 N1 and N2为IRS1和IRS2元件的总数量。TA发送符号到IRS1,每个元件在入射波上应用特殊的相移,使IRS2只有一个元件接受到信号。因此这种方案的比特位数为 l o g 2 M + ⌊ l o g 2 N 2 ⌋ log_2M+\lfloor log_2N_2\rfloor log2M+⌊log2N2⌋。最后IRS2反射信号,并通过RAs进行接收。
s s s为发射信号。IRS1接收的符号为 s + w 1 s+w_1 s+w1,这里 w 1 ∼ C N ( 0 , σ 1 2 ) w_1\sim\mathcal{CN}(0,\sigma^2_1) w1∼CN(0,σ12)。然而在假设1中, σ 1 2 ≈ 0 \sigma^2_1\approx 0 σ12≈0并且 w 1 w_1 w1可以忽略。因此,IRS2的接收向量为
x 2 = b s + w 2 \mathbf x_2=\mathbf bs+\mathbf w_2 x2=bs+w2
这里 w 2 ∼ C N ( 0 , σ 2 2 ) w_2\sim\mathcal{CN}(0,\sigma^2_2) w2∼CN(0,σ22), b \mathbf b b是 N 2 × 1 N_2\times 1 N2×1的向量。在理想条件下, b \mathbf b b应该只有一个与光束索引相对应的非零项(等效于IRS2中的选定元素)。但是,这实际上将不会发生,因为有限功率也会分散在其他方向上,并且此功率分布取决于IRS1每个元素的相对权重。RA处的向量可写为:
y = H x 2 + w R = H b s + w \mathbf y=\mathbf{Hx_2}+\mathbf w_R\\ =\mathbf{Hb}s+\mathbf w y=Hx2+wR=Hbs+w
这里 H \mathbf H H表示在假设3和 w R ∼ C N ( 0 , σ R 2 ) \mathbf w_R\sim\mathcal{CN}(0,\sigma^2_R) wR∼CN(0,σR2)下 N R × N 2 N_R\times N_2 NR×N2信道矩阵。 w = H w 2 + w R \mathbf w=\mathbf{Hw_2}+\mathbf w_R w=Hw2+wR是具有 C N ( 0 , ∑ ) \mathcal{CN}(0,\sum) CN(0,∑)分布的加性噪声, ∑ = H H H σ 2 2 + σ R 2 I \sum=\mathbf{HH^H}\sigma^2_2+\sigma^2_R\mathbf I ∑=HHHσ22+σR2I。最终,接收端必须从 y \mathbf y y中检测出 b \mathbf b b和 s s s才能解码出传输的比特。
B方案2:多符号索引调制

结构如图2所示。在该方案中,IRS1有 N T N_T NT个RS。调制器根据索引调制的 N T N_T NT个不同相位向量,并发射到IRS2的不同RS上。因此, N T N_T NT个RSs将传统的PSK/QAM映射到IRS2上不同的 N T N_T NT个元件。因此,该方案总的比特位数为 l o g 2 M + ⌊ l o g 2 ( N 2 N T ) ⌋ log_2M+\lfloor log_2(\mathop{N_2}\limits_{N_T})\rfloor log2M+⌊log2(NTN2)⌋。可以使用查找表方法或组合方法来组织要激活的元素的选择。该方案也可用等式(1)和(2)表示,不同的是 b \mathbf b b有 N T N_T NT个非零项。
C方案3:最大信噪比的单符号索引调制

如图三所示,该方案与方案1相似,区别在于每个IRS2的元件由 N 3 N_3 N3个元件组成的RS代替。所以IRS2的元件总数变为 N 2 N 3 N_2N_3 N2N3,TA和IRS1都以与方案1相同的方式运行。相比与其他两种方案,该方案的IRS2可对入射信号进行相移。该相移可使接收端信噪比最大化。
因此,接收信号可表示为:
y = H Ξ b s + w \mathbf y=\mathbf H\Xi\mathbf bs+\mathbf w y=HΞbs+w
这里 Ξ \Xi Ξ表示 ( N 2 N 3 × N 2 N 3 ) (N_2N_3\times N_2N_3) (N2N3×N2N3)的IRS2相移对角矩阵。在上式中 H \mathbf H H是 ( N R × N 2 N 3 ) (N_R\times N_2N_3) (NR×N2N3)的矩阵。信噪比可表示为:
SNR = ∥ H Ξ b s ∥ 2 Var ( ∥ w ∥ ) \text{SNR}=\frac{\|\mathbf H\Xi\mathbf bs\|^2}{\text{Var}(\|\mathbf w\|)} SNR=Var(∥w∥)∥HΞbs∥2
令 ξ 1 : N 2 N 3 \xi_{1:N_2N_3} ξ1:N2N3表示 Ξ \Xi Ξ的对角线的项。因此,SNR最大可表示为:
max ξ l ∥ H Ξ b s ∥ 2 s . t . ∣ ξ l ∣ = 1 , ∀ l = 1 , 2 , . . . , N 2 N 3 . \mathop{\text{max}}\limits_{\xi_l}\|\mathbf H\Xi\mathbf bs\|^2\\ s.t.|\xi_l|=1,\forall \ l=1,2,...,N_2N_3. ξlmax∥HΞbs∥2s.t.∣ξl∣=1,∀ l=1,2,...,N2N3.
以上优化问题具有如下挑战:
IRS2是无源设备,解决复杂的优化问题是不且实际的。理想地优化应该在发射机或接收机处进行,并且所得到的信息必须传达给IRS2。如果优化取决于要传输的数据(bs),则必须在每个时隙中进行更新,这是相当大的通信开销。因此,优化应该优选地仅取决于bs的平均值,或者实际上理想地应该独立于它。因此,我们将针对(5)提出以下解决方案。
1)方法1:这种方法基于存在理想波束形状的假设。在IRS2中选定的所有RS接收到相同的功率,同时所有的其他元件接收到的功率为0。不失一般性的(Without loss of generality),将该常数设置为1。优化函数(5)可重写为:

这里 1 \mathbf 1 1表示1s, ξ \xi ξ是由 Ξ \Xi Ξ的对角元素形成的向量。因此,最大化问题变为:

这里 I ^ \hat I I^表示IRS2的RS的特定选择。令 ξ l = e j α l \xi_l=e^{j\alpha_l} ξl=ejαl, ∣ ξ l ∣ = 1 |\xi_l|=1 ∣ξl∣=1。记住这一点(Bearing this in mind),并且 H H H \mathbf H^H\mathbf H HHH是埃尔米特矩阵。公式(5)可重写为以下无约束形式:

这里 ( H H H ) i j (\mathbf H^H\mathbf H)_{ij} (HHH)ij表示 H H H \mathbf H^H\mathbf H HHH的第 ( i , j ) (i,j) (i,j)个元素。因为上式是非凸函数,只能通过一些交替技术来找到该函数的局部最大值。
2)方法2:该方法依赖于假设 N R ≥ N 3 N_R\ge N_3 NR≥N3。RAs的数量要大于IRS2的RS个数。
引理1:令 H Q a n d Ξ Q \mathbf H_Q\ and\ \Xi_Q HQ and ΞQ分别作为 H a n d Ξ \mathbf H\ and\ \Xi H and Ξ对应于所选RS的子矩阵 ( N R × N 3 ) a n d ( N 3 × N 3 ) (N_R\times N_3)\ and\ (N_3\times N_3) (NR×N3) and (N3×N3),令 b Q \mathbf b_Q bQ对应于 b \mathbf b b的子向量。如果 N R ≥ N 3 N_R\ge N_3 NR≥N3的概率为1,边界:
![]()
是非凡的,等同于

附录A:

Ξ Q H H Q H H Q Ξ Q and ( b Q s ) ( b Q s ) H \Xi^H_Q\mathbf H^H_Q\mathbf H_Q\Xi_Q\ \text{and}\ (\mathbf b_Qs)(\mathbf b_Qs)^H ΞQHHQHHQΞQ and (bQs)(bQs)H是正定矩。因此,上式应用【文献58】可得到(9)式。因为 H Q \mathbf H_Q HQ是一个随机矩阵,且如果 R ≥ Q R\ge Q R≥Q(接收天线数大于IRS2有效反射元件数), H Q H H Q \mathbf H^H_Q\mathbf H_Q HQHHQ是一个满秩矩阵的概率为1,因此最小特征值 λ m i n ( Ξ Q H H Q H H Q Ξ Q ) > 0 \lambda_{min}(\Xi^H_Q\mathbf H^H_Q\mathbf H_Q\Xi_Q)>0 λmin(ΞQHHQHHQΞQ)>0。
引理1可用来解决优化问题(5)。思想是最大化非凡下限,而不是实际函数。因此,优化问题(5)变成:

这里式(11)是一个约束非线性极小极大优化问题。这可直接解决【有文献】。它可通过引入额外的变量来转换成一个非线性最大化问题,然后使用标准技术来求解。
需要注意的是,这两种SNR最大化问题的方案, I ^ \hat I I^是IRS2中所选择的RS的数据,它必须优化的,且取决于信息位。为了避免优化对信息位的依赖性,每个RS要分别优化,无论信道有多大的变化。优化相位信息传送给IRS2,并将其应用到所有元件,而不是所选择的RS。多符号方案同样适用。最终,IRS2上所有被激活的RS将通过相移来提升SNR。因此,这两个方案将会提高信息速率和SNR。实际上,最佳相移一定要在接收端来评估,并传送到IRS2。
索引调制的实现
索引调制的背后原理是IRS2特定元件的激活。为了计算相移,假设IRS1和IRS2之间仅有LOS路径。因此,相移仅由IRS对决定。
设IRS1的中心作为原点坐标(0,0,0), P \mathbf P P是IRS1元件的位置向量。根据输入比特序列,由IRS1来激活IRS2的第n个元件。 ( θ n h , θ n v ) (\theta^h_n,\theta^v_n) (θnh,θnv)表示关于原点的方位角和仰角对。由IRS1的元素给定以选择第n个波束的相位矢量为 ϕ = 2 π f τ \phi=2\pi f\tau ϕ=2πfτ,这里 τ = P H u n c \tau=\frac{\mathbf P^H\mathbf u_n}{c} τ=cPHun, c c c为光速, f f f为载频频率。
![]()
在多比特波束索引调制的情况下,必须根据输入比特序列为每个IRS计算这些相移。
另外,如果IRS元件调整输入信号的幅度和相位,可以修改每个元素的相对权重。因为IRS由无源设备构成,放大难以实现,然而减小很容易应用到入射信号。减小的调整可以通过一个窗函数对波束成形和波束图案进行修改。这将有利于减小干扰。
A参数设计
参数涉及IRS1和IRS2的元件数及它们之间的距离。令 λ \lambda λ表示对应最高工作频率的波长。设计的固定参数如下:
1)IRS1中内部元件的间距( d 1 d_1 d1):IRS1中的每个RS元件的间距为 λ 2 \frac{\lambda}{2} 2λ。例如,最大工作频率 f m a x = 60 G H z f_{max}=60GHz fmax=60GHz,那么 d 1 = 2.5 m m d_1=2.5mm d1=2.5mm。现在,如果IRS1有 100 × 100 100\times 100 100×100个元件,那么它的尺寸将为 0.25 × 0.25 m 0.25\times 0.25m 0.25×0.25m。该间距对于避免使用IRS1形成的波束中的光栅波瓣很重要。
2)两个IRS之间的距离(D):距离D应该满足远场条件 D > 2 L 2 λ D>\frac{2L^2}{\lambda} D>λ2L2,L为RS的长度。在上面的例子中,D>25m。如果满足该条件,,那么就假设从IRS1到IRS2的波是平面的。
3)IRS2内部元件的间距( d 2 d_2 d2):IRS2中每个元件的宽度 ( d w ) (d_w) (dw)应该小于 D θ B W D\theta_{BW} DθBW,这里 θ B W \theta_{BW} θBW是IRS1的波束宽度,同时IRS2元件之间的宽度 d 2 d_2 d2应大于该值。这就确保了预期元件或者仅有预期元件接收到来自IRS1的反射信号。对于一个矩形窗,波束宽度近似为 θ B W ≈ 50 λ L \theta_{BW}\approx\frac{50\lambda}{L} θBW≈L50λ。在该例子中, θ B W ≈ 1 0 \theta_{BW}\approx1^0 θBW≈10,对应最小频率。因此,当 D = 25 m D=25m D=25m时, d w < 48 c m and d 2 > 48 c m d_w<48cm\ \text{and}\ d_2>48cm dw<48cm and d2>48cm。现在,如果 N 1 H = N 1 W = 8 N_{1H}=N_{1W}=8 N1H=N1W=8,IRS2的近似尺寸为 4 m × 4 m 4m\times 4m 4m×4m。
4)IRS1的元件数 ( N 1 ) (N_1) (N1):IRS1的元件数决定了阵列的长度L和波束宽度 θ B W \theta_{BW} θBW。这些参数决定两个IRS的距离和IRS2内元件的间距。
5)IRS2的元件数 ( N 2 ) (N_2) (N2):这决定系统的传输速率。很大的 N 2 N_2 N2将提供高传输速率。然而这将使IRS2的尺寸变大。因此, N 2 N_2 N2受最大陈列尺寸的限制。
三、检测器
检测器必须恢复出QAM/PSK符号和IRS2的元件激活模式。也就是必须要检测出(2)或(3)式 y \mathbf y y中的s和 b \mathbf b b。令 x = b s \mathbf x=\mathbf bs x=bs,(2)和(3)式可写为:
y = A x + w ( 12 ) \mathbf y=\mathbf {Ax}+\mathbf w\ (12) y=Ax+w (12)
这里在方案1和2中 A = H \mathbf A=\mathbf H A=H。在方案3中 A = H Ξ \mathbf A=\mathbf H\Xi A=HΞ。假设 A \mathbf A A在接收端是已知的。
A、最佳检测器
1)单符号方案:考虑式(12)中的向量 x \mathbf x x。理想中单符号方案的 x \mathbf x x内仅有一项非零值,因为只有一个元件接收到信号。但这是不可实现的,因为波束成形也会使其他方向非零。现实中在IRS2上有超过一个元件接收到信号。然而,不期望的波束索引的功率远低于期望的索引功率,并且这些功率取决于IRS1使用的窗函数功能。
在上一节的A中,IRS2的元件间距 d 2 = 1.0 m d_2=1.0m d2=1.0m,这大概等于所需最小距离的两倍。对于这个问题,图四显示了 x \mathbf x x的各个索引对应的功率,此时期望的索引是28。
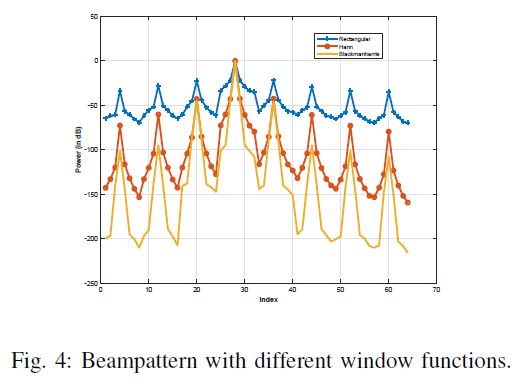
三种窗类型的功率模式,分别为rectangular, Hann and Blackman Harris。考虑所有功率小于40dB的系数为零。因此,rectangular窗有8个非零索引,另外两个仅有一个主要索引。
现在,数据依靠索引的变化,不论用的什么窗函数,图4的模式将会移到不同索引。式(12)可写为:
y = A Π p + w \mathbf y=\mathbf A\Pi_{\mathbf p}+\mathbf w y=AΠp+w
这里 p \mathbf p p表示 x \mathbf x x各种索引功率向量, Π p \Pi_{\mathbf p} Πp表示功率模式的一个特定排列。因此,为了识别波束索引,必须识别功率模式排列 Π p \Pi_{\mathbf p} Πp。现在, y ∼ C N ( A Π p , Σ ) \mathbf y\sim\mathcal{CN}(\mathbf A\Pi_{\mathbf p},\Sigma) y∼CN(AΠp,Σ)。因此,这个问题的ML检测器可写为:

一般的,搜索问题(14)是NP-hard。然而,在该例子中,仅有 N 2 M N_2M N2M个不同的模式对应 N 2 N_2 N2个不同的波束索引,和M个QAM/PSK符号。因此,中等复杂度的搜索将为ML检测器(14)提供最佳解决方案。
2)多符号方案:ML检测器也适用于多符号情况。然而,在同一时间有 N T N_T NT个期望的波束索引同时存在,彼此相互作用,从而产生大量 Π p \Pi_{\mathbf p} Πp可能的组合。明确的是,必须为IRS1中的 N T N_T NT个RS测试 ( N 2 N T ) M (\mathop{N_2}\limits_{N_T})M (NTN2)M个不同模式的假设。因此,ML检测器不再是计算的好方法。
B、次优压缩感知检测器
当活动元素(即接收符号的元素)的数量远小于IRS2中元素的总数时,(12)中的传输向量 x \mathbf x x稀疏。因此,可以使用一种高效的稀疏重建算法,来识别 x \mathbf x x中的非零项,并用来估计 b \mathbf b b。因此,为了成功的恢复出稀疏向量 x \mathbf x x,需要足够的测量次数。这可通过足够的RAs数量( N R N_R NR足够大)和多次测量来实现,这自然会降低数据速率。最终,可从估计的 b \mathbf b b中得到s:
s ^ = min s ∈ M ∥ y − b s ∥ 2 \hat s=\mathop{\text{min}}\limits_{s\in\mathcal M}\|\mathbf y-\mathbf bs\|^2 s^=s∈Mmin∥y−bs∥2
这里 M \mathcal M M是使用的星座。
C、复杂度
最佳ML检测器要计算式(14)中的所有可能的组合,这大约需要 ( N R 3 + N R N 2 ) (N_R^3+N_RN_2) (NR3+NRN2)次乘法。这对每个可能的符号都要进行计算。对于多符号的情况,有 ( N 2 N T ) M (\mathop{N_2}\limits_{N_T})M (NTN2)M个可能的符号。因此,总的计算复杂度约为 ( N 2 N T ) M ( N R 3 + N R N 2 ) (\mathop{N_2}\limits_{N_T})M(N_R^3+N_RN_2) (NTN2)M(NR3+NRN2)次,对于单符号将减少到 N 2 M ( N R 3 + N R N 2 ) N_2M(N_R^3+N_RN_2) N2M(NR3+NRN2)。另一方面,如果使用任何类型的基于压缩感知的次优算法,这个复杂度将会降低到 N 2 N R N T N_2N_RN_T N2NRNT,这相比于最佳ML检测器低多了。
四、平均误码率
在这部分,将评估最佳ML检测器的平均误码率上界。令 P r { Π p i → Π p j } Pr\{\Pi_{\mathbf p}^i\to\Pi_{\mathbf p}^j\} Pr{ Πpi→Πpj}表示模型 Π p i \Pi_{\mathbf p}^i Πpi被识别成 Π p j \Pi_{\mathbf p}^j Πpj的概率, v i , j v_{i,j} vi,j表示这两个排列的错误位数量。平局BER可写为:

这里 n b n_b nb表示每个信道使用的总位数, Ω \Omega Ω是可能排列的总数。式(16)假设所有排列都是等可能的。式(16)中的符号错误概率 P r { Π p i → Π p j } Pr\{\Pi_{\mathbf p}^i\to\Pi_{\mathbf p}^j\} Pr{ Πpi→Πpj}可由以下写出。当 Π p i \Pi_{\mathbf p}^i Πpi被发送时,检测器基于下式识别成 Π p j \Pi_{\mathbf p}^j Πpj作为传输符号:

这里 y \mathbf y y和 Π p = Π p i \Pi_{\mathbf p}=\Pi_{\mathbf p}^i Πp=Πpi由(13)式给出。定义:

因此,有:

式(18)中相交事件概率的计算式非常复杂的。因此,使用Fretchet’s不等式界定:

为了评估该界,对于每个 k ≠ j k\ne j k=j,概率 P r { r j > r k } Pr\{r_j>r_k\} Pr{ rj>rk}一定要进行计算。定理1给出了这个概率的表达式:
定理1:
假设 A ∼ C N ( 0 , I ) \text{A}\sim\mathcal{CN}(0,\mathbf I) A∼CN(0,I)和 σ 2 2 ≪ σ R 2 \sigma_2^2\ll\sigma_R^2 σ22≪σR2。当 Π p i \Pi_{\mathbf p}^i Πpi是实际传输信号时, P r { r j > r k } Pr\{r_j>r_k\} Pr{ rj>rk}由以下给出:

最终,对于每个传输符号 Π p i \Pi_{\mathbf p}^i Πpi, ∀ k ≠ j \forall\ k\ne j ∀ k=j,概率 P r { r j > r k } Pr\{r_j>r_k\} Pr{ rj>rk}的最小值可通过定理1进行计算,将 P r { Π p i → Π p j } Pr\{\Pi_{\mathbf p}^i\to\Pi_{\mathbf p}^j\} Pr{ Πpi→Πpj}带入(16)式中可得到平均BER的界。
平均BER的边界导出值可用于方案1和方案2,因为在这两种方案中 A = H \mathbf A=\mathbf H A=H。方案1中, Ω = N 2 M , n b = l o g 2 M + ⌊ l o g 2 N 2 ⌋ \Omega=N_2M,n_b=log_2M+\lfloor log_2N_2\rfloor Ω=N2M,nb=log2M+⌊log2N2⌋。方案2中, Ω = ( N 2 N T ) M , n b = l o g 2 M + ⌊ l o g 2 ( N 2 N T ) ⌋ \Omega=(\mathop{N_2}\limits_{N_T})M,n_b=log_2M+\lfloor log_2(\mathop{N_2}\limits_{N_T})\rfloor Ω=(NTN2)M,nb=log2M+⌊log2(NTN2)⌋。方案3中, A = H Ξ \mathbf A=\mathbf H\Xi A=HΞ,因此 A \mathbf A A不再服从分布 C N ( 0 , I ) \mathcal{CN}(0,\mathbf I) CN(0,I)。但是,附录C中得出的条件概率也可以用于方案3。基于此,可以使用采样方法来计算边界,从而得出无条件概率。
五、仿真结果
- 频段:55-60GHz
- IRS1: 100 × 100 100\times 100 100×100的矩形阵列,间距2.5mm。这对应最高频60GHz的半波长。
- 两个IIRS之间的距离(D):30m。这个距离满足IRS1的远场条件。
- IRS2: 8 × 8 8\times 8 8×8的举行阵列,间距 d 2 = 60 c m d_2=60cm d2=60cm。这些参数会针对不同性能研究进行修改。
所有仿真采用16QAM。结果为 1 0 5 10^5 105次蒙特卡洛实验。信道完美已知。


图5和图6为方案一的性能。
从图6可看出,低复杂度CS检测器不如ML检测器。图6是针对d2 = 85 cm(约为最小距离的1.5倍)绘制的,以适应“ Hann”窗的更大光束宽度。当IRS2中的元素间间距加倍时,以及使用窗口功能时,CS检测器的性能也会得到改善。
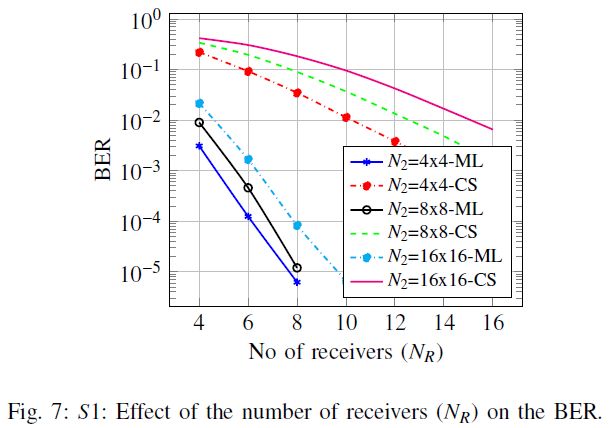
图7所示,可以通过增加RA的数量来提高CS检测器的性能。对于相同的RA数,随着 N 2 N_2 N2的增加,性能有所降低,但数据速率会增加。

图8中S2的 N T = 2 N_T=2 NT=2,三种方式的元件数量相同。在S3中, 2 × 2 2\times 2 2×2代替一个元件。因此,IRS2在S3中的有效尺寸为4×4,而在S1和S2的情况下为8×8。因此,由于IRS1中有更多的RS,因此S3的数据速率最低,而S2的数据速率最高。图例S3O1和S3O2分别代表两种优化方法的结果,即(8)和(11)的解。这两种方案的性能均优于S1和S2。这是因为由于优化,接收到的SNR有所增加。

图9显示了随着IRS1的RS( N T N_T NT)数量变化,在CS检测器下,应用方案3,不同数量的接收设备( N R N_R NR)的误码率变化。平均BER随着 N T N_T NT的增加而增加,这可以通过增加接收器的数量来减小。但 N T N_T NT的增加可使数据速率增加。在这种情况下,对于单个RS情况(相当于S1),数据速率为10 bpcu,而对于NT = 2、4、6和8,数据速率为14、23、30和36。
图10中,说明了信道估计误差的影响。图中显示了有和没有信道估计的平均BER。通过添加方差为 σ R 2 \sigma^2_R σR2的噪声来破坏真实的信道系数。可以看出,由于信道估计误差,S1和S2的性能均下降约2-3 dB,而S3的这一差距超过4 dB。这是因为在S3中,受污染的信道信息既用于优化又用于检测。
《Intelligent Reflecting Surface Assisted Beam Index-Modulation
for Millimeter Wave Communication》