智能反射面信道估计论文: Channel Estimation for Reconfigurable Intelligent Surface Aided Multi-User MIMO Systems
这篇博文是对arxiv文章: 《这篇博文是对magazine文章: 《Channel Estimation for Reconfigurable Intelligent Surface Aided Multi-User MIMO Systems》的读后感记录,原文可在arxiv查找到。
作者是 Jie Chen, Student Member, IEEE, Ying-Chang Liang, Fellow, IEEE, Hei Victor Cheng, Member, IEEE, and Wei Yu, Fellow, IEEE
文章目录
- 文章简介
- 文章贡献
- 系统模型
- 估计协议
- 最小二乘(LS)估计
- 信道的稀疏表示
文章简介
在上一篇博文中,magazine文章详细列举了智能反射面的多种用途。与此同时,许多基于智能反射面系统的波束成形设计已被广泛研究。 然而,这些研究往往基于完美信道信息的假设, 但实际中, 由于智能反射面本身并不能进行信号处理, 因此相比于传统通信系统,会导致对信道的估计非常艰难。 这篇文章便是提出了智能反射面系统的一种上行信道估计算法。 根据信道的稀疏性, 作者使用了压缩感知类的算法来做信道估计。
文章贡献
- 作者指出, 由于基站与反射面往往安置在相近高度,因此其间的散射非常少, 即信道径数很有限。 因此,智能反射面系统的信道有类似于毫米波信道的稀疏性。 但是,由于智能反射面的信道由两部分组成,因此他的稀疏性又有别于普通的毫米波信道, 作者称之为 row-column-block sparse。 这个后面后细说。
- 基于这一特殊的稀疏性, 作者针对性地提出了一种压缩感知算法, 可以相比传统方法更好的恢复信道。
- 由于变量之间的耦合,本文采用了一种交替迭代优化的算法(alternating optimizaiton),并且分析了其收敛性。
系统模型
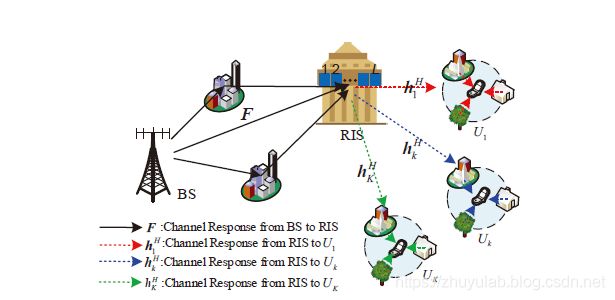
如图,文章考虑的是一个基站通过智能反射面,服务于多个用户的场景。 以下是一些符号:
- K K K: 用户数
- M M M: 基站天线数 (假定用户为单天线)
- L L L: 智能反射面反射元件数
- U 1 , . . . , U k U_1, ..., U_k U1,...,Uk, 用户 1 1 1,…用户 k k k
- F \mathbf{F} F: L × M L \times M L×M, 基站到反射面的信道
- h k H \mathbf{h}^H_k hkH: 1 × L 1 \times L 1×L, 反射面到 k k k用户的信道
- V o = d i a g ( v 0 ) \mathbf{V}_o = \mathbf{diag}(\mathbf{v}_0) Vo=diag(v0): L × L L \times L L×L的对角阵, 表示反射面对入射信道的处理(幅度和相位的调整)。本文中认为只有相位的调整。
- 整个信道可表示为: h k H V o F \mathbf{h}^H_k \mathbf{V}_o\mathbf{F} hkHVoF
由于 h k H diag ( v ) = v T diag ( h k H ) \boldsymbol{h}_{k}^{H} \operatorname{diag}(\boldsymbol{v})=\boldsymbol{v}^{T} \operatorname{diag}\left(\boldsymbol{h}_{k}^{H}\right) hkHdiag(v)=vTdiag(hkH), 我们真正要估计的信道信息其实就是:
G k = diag ( h k H ) F ∈ C L × M G_{k}=\operatorname{diag}\left(h_{k}^{H}\right) F \in \mathbb{C}^{L \times M} Gk=diag(hkH)F∈CL×M
这一点非常重要。 但必须指出的是,这是基于用户端是单天线的假设,如果多天线的话则不再成立。
估计协议

文章提出了一种估计的协议。 首先, 在第一阶段, 智能反射面保持不变的反射因子, 用户传输 B B B个正交序列,基站接收到的信号可表示为下式:
Y b = ∑ k = 1 K F H diag ( v b ) h k s k H + U b = ( a ) ∑ k = 1 K G k H v b s k H + U b \begin{aligned} \boldsymbol{Y}_{b} &=\sum_{k=1}^{K} \boldsymbol{F}^{H} \operatorname{diag}\left(\boldsymbol{v}_{b}\right) \boldsymbol{h}_{k} \boldsymbol{s}_{k}^{H}+\boldsymbol{U}_{b} \\ & \stackrel{(\mathrm{a})}{=} \sum_{k=1}^{K} \boldsymbol{G}_{k}^{H} \boldsymbol{v}_{b} \boldsymbol{s}_{k}^{H}+\boldsymbol{U}_{b} \end{aligned} Yb=k=1∑KFHdiag(vb)hkskH+Ub=(a)k=1∑KGkHvbskH+Ub
其中 U b U_b Ub为噪声, s k s_k sk为 k k k个用户发送的导频序列。
最小二乘(LS)估计
文章先用了传统的LS估计。 由于假设每个用户发送的是正交序列, 即: s k 1 H s k 2 = 0 s_{k_{1}}^{H} s_{k_{2}}=0 sk1Hsk2=0 for 1 ≤ k 1 , k 2 ≤ K 1 \leq k_{1}, k_{2} \leq K 1≤k1,k2≤K and k 1 ≠ k 2 k_{1} \neq k_{2} k1=k2,因此有:
y ~ b , k ≜ 1 P T Y b s k = G k H v b + u b , k \tilde{\boldsymbol{y}}_{b, k} \triangleq \frac{1}{P T} \boldsymbol{Y}_{b} \boldsymbol{s}_{k}=\boldsymbol{G}_{k}^{H} \boldsymbol{v}_{b}+\boldsymbol{u}_{b, k} y~b,k≜PT1Ybsk=GkHvb+ub,k
将多个用户的写到一起:
Y ~ k = G k H V + U ~ k \tilde{\boldsymbol{Y}}_{k}=\boldsymbol{G}_{k}^{H} \boldsymbol{V}+\tilde{\boldsymbol{U}}_{k} Y~k=GkHV+U~k
其中, V = [ v 1 , v 2 , ⋯ , v B ] \boldsymbol{V}=\left[\boldsymbol{v}_{1}, \boldsymbol{v}_{2}, \cdots, \boldsymbol{v}_{B}\right] V=[v1,v2,⋯,vB], Y ~ k = [ y ~ 1 , k , y ~ 2 , k , ⋯ , y ~ B , k ] \tilde{\boldsymbol{Y}}_{k} = \left[\tilde{\boldsymbol{y}}_{1, k}, \tilde{\boldsymbol{y}}_{2, k}, \cdots, \tilde{\boldsymbol{y}}_{B, k}\right] Y~k=[y~1,k,y~2,k,⋯,y~B,k], B B B是发送的训练序列数量。
那么这个的最小二乘解就是
G ^ k = ( Y ~ k V † ) H \hat{G}_{k}=\left(\tilde{\boldsymbol{Y}}_{k} \boldsymbol{V}^{\dagger}\right)^{H} G^k=(Y~kV†)H
其中, V † = V H ( V V H ) − 1 \boldsymbol{V}^{\dagger}=\boldsymbol{V}^{H}\left(\boldsymbol{V} \boldsymbol{V}^{H}\right)^{-1} V†=VH(VVH)−1。 这个解可以通过求导置为0得到。 而要使得 ( V V H ) − 1 \left(\boldsymbol{V} \boldsymbol{V}^{H}\right)^{-1} (VVH)−1有值, V \mathbf{V} V必须满足为列数>行数,这样才能满秩求逆。 因此, B > L B > L B>L, 即只有训练序列数大于智能反射面元件数时, 才能使用LS估计, 而这在 L L L较大时,开销显然非常高昂。