An overview of object detection: one-stage methods
An overview of object detection: one-stage methods.
In this post, I'll discuss an overview of deep learning techniques for object detection using convolutional neural networks. Object detection is useful for understanding what's in an image, describing both what is in an image and where those objects are found.
In general, there's two different approaches for this task – we can either make a fixed number of predictions on grid (one stage) or leverage a proposal network to find objects and then use a second network to fine-tune these proposals and output a final prediction (two stage).
In this blog post, I'll discuss the one-stage approach towards object detection; a follow-up post will then discuss the two-stage approach. Each approach has its own strengths and weaknesses, which I'll discuss in the respective blog posts.
Jump to:
- Understanding the task
- Direct object prediction
- Predictions on a grid
- Non-maximum suppression
- YOLO: You Only Look Once
- SSD: Single Shot Detection
- Addressing object imbalance with focal loss
- Common datasets and competitions
- Further reading
Understanding the task
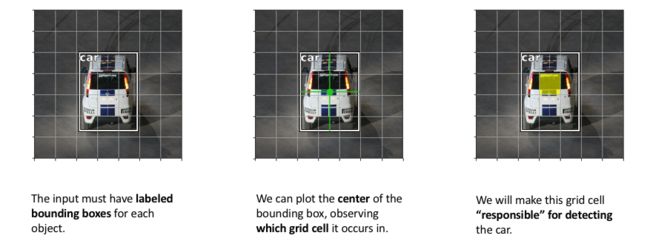
The goal of object detection is to recognize instances of a predefined set of object classes (e.g. {people, cars, bikes, animals}) and describe the locations of each detected object in the image using a bounding box. Two examples are shown below.

Example images are taken from the PASCAL VOC dataset.
We'll use rectangles to describe the locations of each object, which may lead to imperfect localizations due to the shapes of objects. An alternative approach would be image segmentation which provides localization at the pixel-level.
Direct object prediction
This blog post will focus on model architectures which directly predict object bounding boxes for an image in a one-stage fashion. In other words, there is no intermediate task (as we'll discuss later with region proposals) which must be performed in order to produce an output. This leads to a simpler and faster model architecture, although it can sometimes struggle to be flexible enough to adapt to arbitrary tasks (such as mask prediction).
Predictions on a grid
In order to understand what's in an image, we'll feed our input through a standard convolutional network to build a rich feature representation of the original image. We'll refer to this part of the architecture as the "backbone" network, which is usually pre-trained as an image classifier to more cheaply learn how to extract features from an image. This is a result of the fact that data for image classification is easier (and thus cheaper) to label as it only requires a single label as opposed to defining bounding box annotations for each image. Thus, we can train on a very large labeled dataset (such as ImageNet) in order to learn good feature representations.
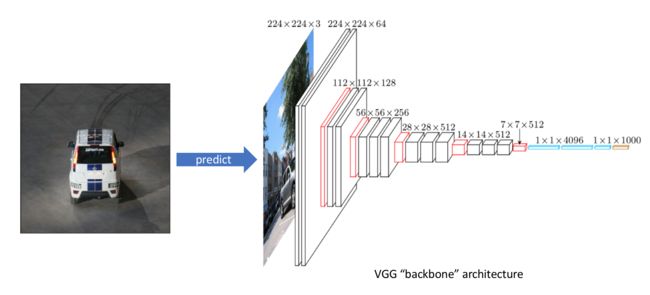
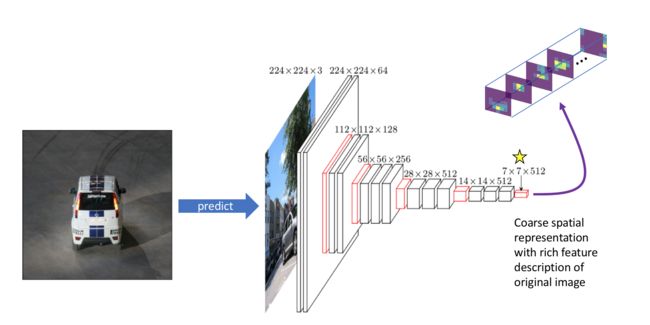
After pre-training the backbone architecture as an image classifier, we'll remove the last few layers of the network so that our backbone network outputs a collection of stacked feature maps which describe the original image in a low spatial resolution albeit a high feature (channel) resolution. In the example below, we have a 7x7x512 representation of our observation. Each of the 512 feature maps describe different characteristics of the original image.
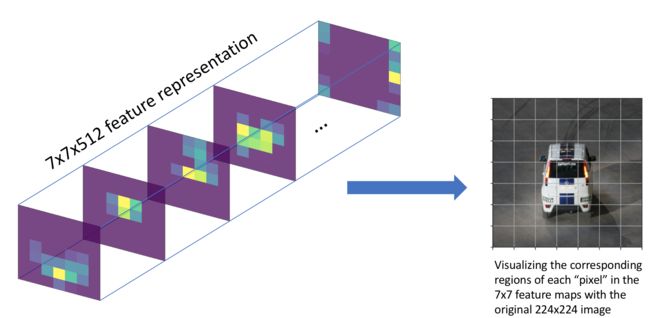
We can relate this 7x7 grid back to the original input in order to understand what each grid cell represents relative to the original image.
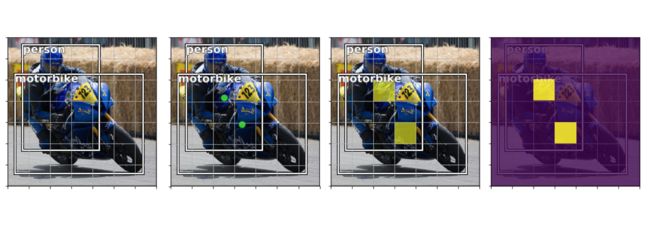
We can also determine roughly where objects are located in the coarse (7x7) feature maps by observing which grid cell contains the center of our bounding box annotation. We'll assign this grid cell as being "responsible" for detecting that specific object.
In order to detect this object, we will add another convolutional layer and learn the kernel parameters which combine the context of all 512 feature maps in order to produce an activation corresponding with the grid cell which contains our object.

If the input image contains multiple objects, we should have multiple activations on our grid denoting that an object is in each of the activated regions.
However, we cannot sufficiently describe each object with a single activation. In order to fully describe a detected object, we'll need to define:
- The likelihood that a grid cell contains an object (pobj)
- Which class the object belongs to (c1, c2, ..., cC)
- Four bounding box descriptors to describe the x
- coordinate, y coordinate, width, and height of a labeled box (tx, ty, tw, th
- )
Thus, we'll need to learn a convolution filter for each of the above attributes such that we produce 5+C
output channels to describe a single bounding box at each grid cell location. This means that we'll learn a set of weights to look across all 512 feature maps and determine which grid cells are likely to contain an object, what classes are likely to be present in each grid cell, and how to describe the bounding box for possible objects in each grid cell.
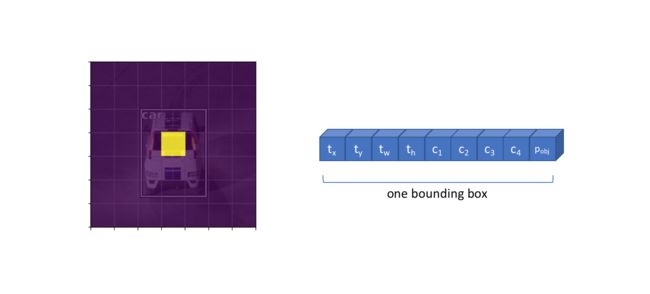
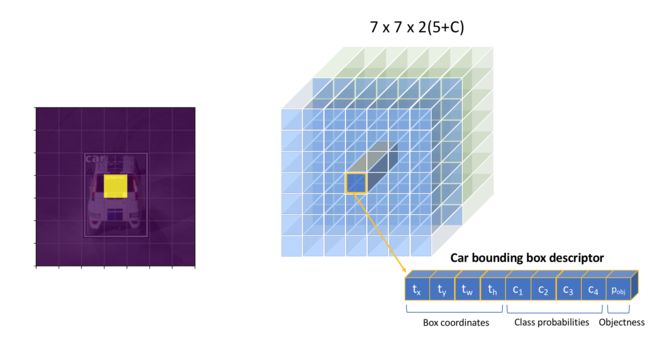
The full output of applying 5+C
convolutional filters is shown below for clarity, producing one bounding box descriptor for each grid cell.
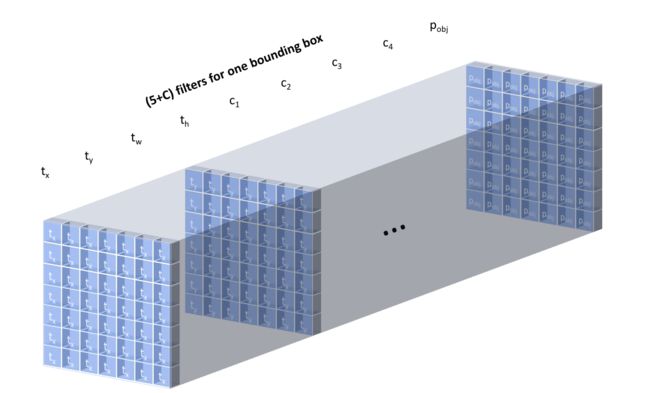
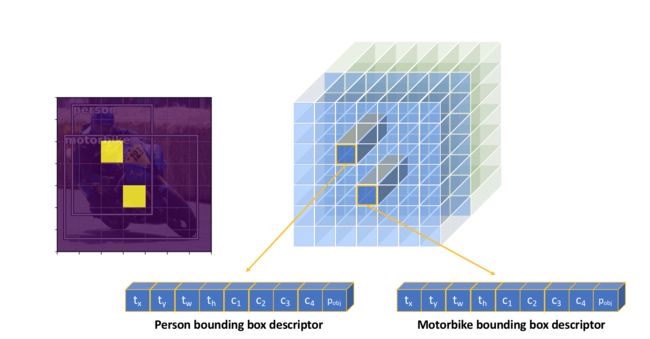
However, some images might have multiple objects which "belong" to the same grid cell. We can alter our layer to produce B(5+C)
filters such that we can predict Bbounding boxes for each grid cell location.

Visualizing the full convolutional output of our B(5+C)
filters, we can see that our model will always produce a fixed number of N×N×B predictions for a given image. We can then filter our predictions to only consider bounding boxes which has a pobjabove some defined threshold.
Because of the convolutional nature of our detection process, multiple objects can be detected in parallel. However, we also end up predicting for a large number grid cells where no object is found. Although we can filter these bounding boxes out by their pobj
score, this introduces quite a large imbalance between the predicted bounding boxes which contain an object and those which do not contain an object.
The two models I'll discuss below both use this concept of "predictions on a grid" to detect a fixed number of possible objects within an image. In the respective sections, I'll describe the nuances of each approach and fill in some of the details that I've glanced over in this section so that you can actually implement each model.
Non-maximum suppression
The "predictions on a grid" approach produces a fixed number of bounding box predictions for each image. However, we would like to filter these predictions in order to only output bounding boxes for objects that are actually likely to be in the image. Moreover, we want a single bounding box prediction for each object detected.
We can filter out most of the bounding box predictions by only considering predictions with a pobj
above some defined confidence threshold. However, we still may be left with multiple high-confidence predictions describing the same object. Thus, we need a method for removing redundant object predictions such that each object is described by a single bounding box.
To accomplish this, we'll use a technique known as non-max suppression. At a high level, this technique will look at highly overlapping bounding boxes and suppress (or discard) all of the predictions except the highest confidence prediction.
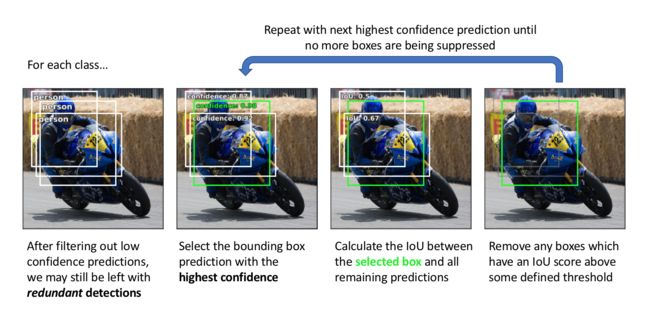
We'll perform non-max suppression on each class separately. Again, the goal here is to remove redundant predictions so we shouldn't be concerned if we have two predictions that overlap if one box is describing a person and the other box is describing a bicycle. However, if two bounding boxes with high overlap are both describing a person, it's likely that these predictions are describing the same person.
YOLO: You Only Look Once
The YOLO model was first published (by Joseph Redmon et al.) in 2015 and subsequently revised in two following papers. In each section, I'll discuss the specific implementation details and refinements that were made to improve performance.
Backbone network
The original YOLO network uses a modified GoogLeNet as the backbone network. Redmond later created a new model named DarkNet-19 which follows the general design of a 3×3
filters, doubling the number of channels at each pooling step; 1×1
filters are also used to periodically compress the feature representation throughout the network. His latest paper introduces a new, larger model named DarkNet-53 which offers improved performance over its predecessor.
All of these models were first pre-trained as image classifiers before being adapted for the detection task. In the second iteration of the YOLO model, Redmond discovered that using higher resolution images at the end of classification pre-training improved the detection performance and thus adopted this practice.
Adapting the classification network for detection simply consists of removing the last few layers of the network and adding a convolutional layer with B(5+C)
filters to produce the N×N×B
bounding box predictions.
Bounding boxes (and concept of anchor boxes)
The first iteration of the YOLO model directly predicts all four values which describe a bounding box. The x
and y coordinates of each bounding box are defined relative to the top left corner of each grid cell and normalized by the cell dimensions such that the coordinate values are bounded between 0 and 1. We define the boxes width and height such that our model predicts the square-root width and height; by defining the width and height of the boxes as a square-root value, differences between large numbers are less significant than differences between small numbers (confirm this visually by looking at a plot of y=x−−√
). Redmond chose this formulation because “small deviations in large boxes matter less than in small boxes" and thus when calculating our loss function we would like the emphasis to be placed on getting small boxes more exact. The bounding box width and height are normalized by the image width and height and thus are also bounded between 0 and 1. An L2 loss is applied during training.
This formulation was later revised to introduce the concept of a bounding box prior. Rather than expecting the model to directly produce unique bounding box descriptors for each new image, we will define a collection of bounding boxes with varying aspect ratios which embed some prior information about the shape of objects we're expecting to detect. Redmond offers an approach towards discovering the best aspect ratios by doing k-means clustering (with a custom distance metric) on all of the bounding boxes in your training dataset.
In the image below, you can see a collection of 5 bounding box priors (also known as anchor boxes) for the grid cell highlighted in yellow. With this formulation, each of the B
bounding boxes explicitly specialize in detecting objects of a specific size and aspect ratio.
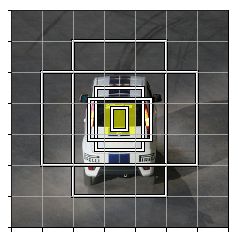
Note: Although it is not visualized, these anchor boxes are present for each cell in our prediction grid.
Rather than directly predicting the bounding box dimensions, we'll reformulate our task in order to simply predict the offset from our bounding box prior dimensions such that we can fine-tune our predicted bounding box dimensions. This reformulation makes the prediction task easier to learn.
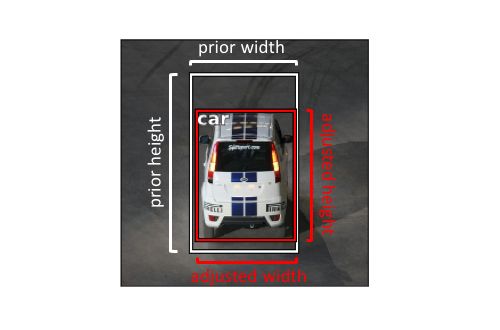
For similar reasons as originally predicting the square-root width and height, we'll define our task to predict the log offsets from our bounding box prior.
Objectness (and assigning labeled objects to a bounding box)
In the first version of the model, the "objectness" score pobj
was trained to approximate the Intersection over Union (IoU) between the predicted box and the ground truth label. When we calculate our loss during training, we'll match objects to whichever bounding box prediction (on the same grid cell) has the highest IoU score. For unmatched boxes, the only descriptor which we'll include in our loss function is pobj
.
After the addition bounding box priors in YOLOv2, we can simply assign labeled objects to whichever anchor box (on the same grid cell) has the highest IoU score with the labeled object.
In the third version, Redmond redefined the "objectness" target score pobj
to be 1 for the bounding boxes with highest IoU score for each given target, and 0 for all remaining boxes. However, we will not include bounding boxes which have a high IoU score (above some threshold) but not the highest score when calculating the loss. In simple terms, it doesn't make sense to punish a good prediction just because it isn't the best prediction.
Class labels
Originally, class prediction was performed at the grid cell level. This means that a single grid cell could not predict multiple bounding boxes of different classes. This was later revised to predict class for each bounding box using a softmax activation across classes and a cross entropy loss.
Redmond later changed the class prediction to use sigmoid activations for multi-label classification as he found a softmax is not necessary for good performance. This choice will depend on your dataset and whether or not your labels overlap (eg. "golden retriever" and "dog").
Output layer
The first YOLO model simply predicts the N×N×B
bounding boxes using the output of our backbone network.
In YOLOv2, Redmond adds a weird skip connection splitting a higher resolution feature map across multiple channels as visualized below.
The weird "skip connection from higher resolution feature maps" idea that I don't like.
Fortunately, this was changed in the third iteration for a more standard feature pyramid network output structure. With this method, we'll alternate between outputting a prediction and upsampling the feature maps (with skip connections). This allows for predictions that can take advantage of finer-grained information from earlier in the network, which helps for detecting small objects in the image.
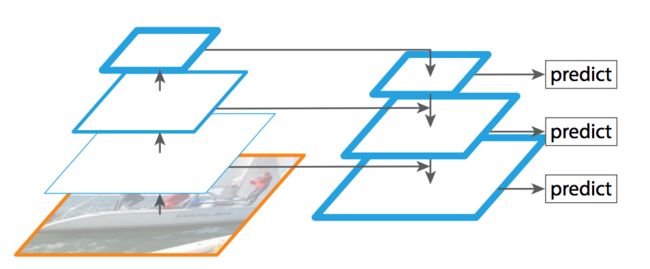
Image credit
credit
SSD: Single Shot Detection
The SSD model was also published (by Wei Liu et al.) in 2015, shortly after the YOLO model, and was also later refined in a subsequent paper. In each section, I'll discuss the specific implementation details for this model.
Backbone network
A VGG-16 model, pre-trained on ImageNet for image classification, is used as the backbone network. The authors make a few slight tweaks when adapting the model for the detection task, including: replacing fully connected layers with convolutional implementations, removing dropout layers, and replacing the last max pooling layer with a dilated convolution.
Bounding boxes (and concept of anchor boxes)
Rather than using k-means clustering to discover aspect ratios, the SSD model manually defines a collection of aspect ratios (eg. {1, 2, 3, 1/2, 1/3}) to use for the B
bounding boxes at each grid cell location.
For each bounding box, we'll predict the offsets from the anchor box for both the bounding box coordinates (x
and y
) and dimensions (width and height). We'll use ReLU activations trained with a Smooth L1 loss.
Objectness (and assigning labeled objects to a bounding box)
One major distinction between YOLO and SSD is that SSD does not attempt to predict a value for pobj
. Whereas the YOLO model predicted the probability of an object and then predicted the probability of each class given that there was an object present, the SSD model attempts to directly predict the probability that a class is present in a given bounding box.
When calculating the loss, we'll match each ground truth box to the anchor box with the highest IoU — defining this box with being "responsible" for making the prediction. However, we'll also match the ground truth boxes with any other anchor boxes with an IoU above some defined threshold (0.5) in the same light of not punishing good predictions simply because they weren't the best. We can always rely on non-max suppression at inference time to filter out redundant predictions.
Class labels
As I mentioned previously, the class predictions for SSD bounding boxes are not conditioned on the fact that an object is present. Thus, we directly predict the probability of each class using a softmax activation and cross entropy loss. Because we don't explicitly predict pobj
, it's important to have a class for "background" so that we can predict when no object is present.
Due to the fact that most of the boxes will belong to the "background" class, we will use a technique known as "hard negative mining" to sample negative (no object) predictions such that there is at most a 3:1 ratio between negative and positive predictions when calculating our loss.
Output layer
To allow for predictions at multiple scales, the SSD output module progressively downsamples the convolutional feature maps, intermittently producing bounding box predictions (as shown with the arrows from convolutional layers to the predictions box).

Addressing object imbalance with focal loss
As I mentioned earlier, we often end up with a large amount of bounding boxes in which no object is contained due to the nature of our "predictions on a grid" approach. Although we can easily filter these boxes out after making a fixed set of bounding box predictions, there is still a (foreground-background) class imbalance present which can introduce difficulties during training. This is especially difficult for models which don't separate prediction of objectness and class probability into two separate tasks, and instead simply include a "background" class for regions with no objects.
Researchers at Facebook proposed adding a scaling factor to the standard cross entropy loss such that it places more the emphasis on "hard" examples during training, preventing easy negative predictions from dominating the training process.
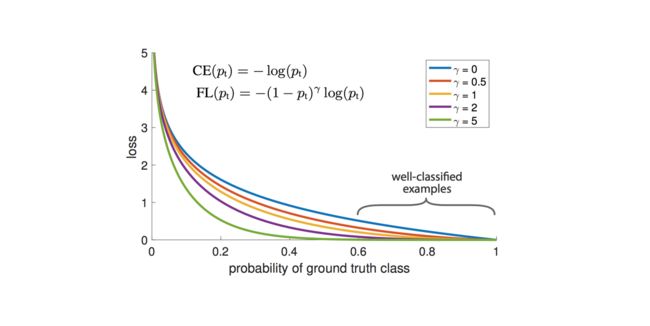
Image credit
As the researchers point out, easily classified examples can incur a non-trivial loss for standard cross entropy loss (γ=0
) which, summed over a large collection of samples, can easily dominate the parameter update. The (1−pt)γ
term acts as a tunable scaling factor to prevent this from occuring.
As the paper points out, "with γ=2
, an example classified with pt=0.9 would have 100X lower loss compared with CE and with pt=0.968
it would have 1000X lower loss."
Common datasets and competitions
Below I've listed some common datasets that researchers use when evaluating new object detection models.
- PASCAL VOC 2012 Detection Competition
- COCO 2018 Stuff Object Detection Task
- ImageNet Object Detection Challenge
- Google AI Open Images - Object Detection Track
- Vision Meets Drones: A Challenge
Further reading
Papers
- YOLO
- You Only Look Once: Unified, Real-Time Object Detection
- YOLO9000: Better, Faster, Stronger
- YOLOv3: An Incremental Improvement
- SSD
- SSD: Single Shot MultiBox Detector
- DSSD: Deconvolutional Single Shot Detector (I didn't discuss this in the blog post but it's worth the read)
- Focal Loss for Dense Object Detection
- An Intriguing Failing of Convolutional Neural Networks and the CoordConv Solution (see relevant section on object detection)
- Explainer video
Lectures
- Stanford CS 231n: Lecture 11 | Detection and Segmentation
Blog posts
- Understanding deep learning for object detection
- Real-time Object Detection with YOLO, YOLOv2 and now YOLOv3
Frameworks and GitHub repos
- Luminoth
- Darkflow
Tools for labeling data
- Computer Vision Annotation Tool (CVAT)
- LabelImg
- Microsoft's Visual Object Tagging Tool
- Taggerine
原文链接:https://www.jeremyjordan.me/object-detection-one-stage/
翻译:https://www.jiqizhixin.com/articles/2018-08-06-2