复习—线性结构之数组与广义表
文章目录
- 数组
-
- 定义
- 矩阵的压缩存储
-
- 特殊矩阵的压缩存储
-
- 对称矩阵的压缩
- 三对角矩阵的压缩
- 稀疏矩阵的压缩存储
-
- 三元组法
- 广义表
-
- 定义
- 存储结构
- 广义表的深度
数组和广义表都可以看成是 表中数据元素本身也是数据结构的线性表
数组
定义
对于n维数组来说,每个元素都受到n个关系的约束,在每个关系中aj1j2…jn都会有一个直接后继,因此,对于单个关系而言,仍为线性关系。
n维数组可以看为线性表的推广且所有数据元素都属于同一数据类型。
数组一旦被定义,它的维度和维界就不再改变。因此,除了初始化和销毁之外,数组只有存取元素和修改元素的操作
也就意味着不能插入和删除
另外,数组在计算机中存储时有行优先的规定
对于二维数组来说LOC(i,j)=LOC(0,0)+(b2*i+j)*L
(b2为第二维的长度,L为单个元素所占存储空间大小)
三维数组按照 页/行/列的顺序存储
对于n维数组
LOC(j1,j2,…,jn)=LOC(0,0,…,0)+(b2X…XbnXj1+b3X…XbnXj2+…+bnXjn-1+jn)XL
矩阵的压缩存储
特殊矩阵的压缩存储
特殊矩阵是指:值相同的元素或者非零元素在矩阵中的分布有一定规律的矩阵。
目的是为了节省存储空间,对可以不存储的元素(0或者对称元素)不再存储
常见的例子有对称矩阵和三对角矩阵
对称矩阵的压缩
因为对称矩阵中aij=aji
所以我们只存储上三角/下三角矩阵(对角线+对角线上/下部分的元素)
存储方法
将上/下三角矩阵存放到一个n(n+1)/2长度的一维数组中,称为对称矩阵的压缩。
对应关系
若存储下三角矩阵,则存储元素aij全都有i>=j(1=
当j>=i时,k=j(j-1)/2+i-1(即用aji对应了上三角的aij)
此时一位数组sa[k]=aij,有了对应关系。
这样的存储方法也适用于三角矩阵
所谓的上(下)三角矩阵就是矩阵的下(上)三角(不包括对角线)中元素都为0或常数c的n阶矩阵。
这样只需要存上(下)三角中的元素再加一个常数C即可压缩三角矩阵。
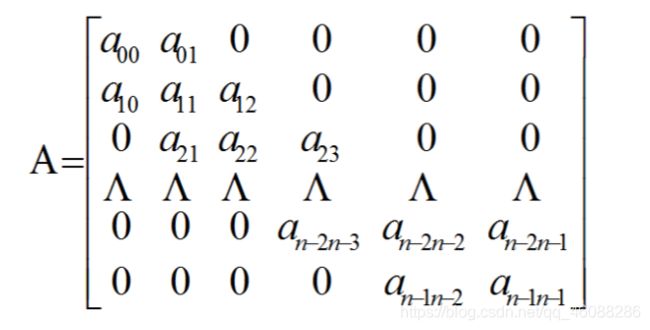
三对角矩阵的压缩
三对角矩阵除了主对角线和主对角线上、下相邻的两条对角线上的元素外,其他元素都为0。 共有n+n-1+n-1=3n-2个要存储的元素
三对角矩阵也是按照行优先的方式压缩到一维数组中
课本上这里的 i,j又从零开始了…
对于aij
第i行前有3*i-1个非零元素
本行中第j列前有j-i+1个非零元素
所以k=2*i+j
所以B[2*i+j]=A[i][j]
而且,i=(k+1)/3向下取整、j=k-2i
稀疏矩阵的压缩存储
稀疏矩阵0元素>>非零元素且分布无规律的矩阵。
常使用矩阵的稀疏因子来判断,δ=t/m*n(t为非零元素数,m,n为矩阵规格)
当δ<=0.05时,常认为是稀疏矩阵。
稀疏矩阵的存储和特殊矩阵的存储不同
特殊矩阵压缩不需要存储元素位置
而稀疏矩阵元素分布无规律,因此要存储元素所在的位置
且还要存储稀疏矩阵的规格M,N
三元组法

三元组的数据结构如下
class Tnode
{
public:
int i,j; //每个结点的原来的位置
int e; // 结点的值
};
class Triple
{
public:
int mu,nu,tu; //矩阵的规格,和非零元素的个数
Tnode data[Maxsize+1];//三元组,0号位未使用。
};
因为C语言的数组是行优先存储,所以我们的三元组大都是以行序排列的
三元组表示的稀疏矩阵的转置算法
方法1.按照三元组中的列数进行转置
对三元组扫描nu次,第k次对列数为k的项进行操作:将其行号列号互换,顺序存到三元组中。
T.mu=nu;
T.nu=mu;
T.tu=tu;
if(T.tu)
{
int q=1;
for(int clo=1;clo<=nu;clo++)
{
for(int p=1;p<=tu;p++)
{
if(data[p].j==clo)
{
T.data[q].i=data[p].j;
T.data[q].j=data[p].i;
T.data[q].e=data[p].e;
q++;
}
}
}
}
时间复杂度为O(nu*tu)
一般的矩阵转置算法的时间复杂度为O(munu)
当tu=munu时,为O(munu^2)
仅适用于tu<
方法2.快速转置运算
核心预先确定矩阵每一行第一个非零元素在三元组中的位置,转置时就可以直接放进去。
算法就先不写了,溜了~~
行逻辑连接的顺序表可方便进行稀疏矩阵乘法
十字链表法适用于矩阵加法或减法运算。
广义表
定义
顾名思义,广义表是线性表的推广(也称为列表list)因此定义也相仿。
如下
广义表是n(>=0)个表元素组成的有限序列
记作LS=(a0,a1,a2,…,an-1)
其中LS为表名,ai为表元素,它可以是表(称为子表),也可以是数据元素(称为原子)
常常以大写字母表示广义表,小写字母表示原子
n为表的长度,n=0的广义表为空表
n>0时,表的第一个元素称为广义表的表头(head),除此之外,其他元素组成的表叫做广义表的表尾(tail)
举几个栗子
A=()
A为空表,长度为0;
B=(e)
列表B只有一个原子,长度为1
C=(a,(b,c,d))
列表C长度为2,两个元素分别为原子a和子表(b,c,d)
D=(A,B,C)
列表D长度为3,3个元素都为子表
E=(a,E)
列表E长度为2,是一个递归的表
F=( ( ) )
列表F长度为1,元素为空表
注意点
1.列表的元素可能是子表,子表的元素还可以是子表…因此,列表是一个多层次的结构。
2.列表可以被其他列表共享。/ / D中有A,B,C三个子表
3.列表可以为一个递归的表,即列表可以是本身的一个子表。
4.任何一个非空列表其表头可能是原子,也可能是列表,但其表尾一定是列表
存储结构
由于广义表中数据元素可以具有不同的结构,所以很难用顺序结构统一,所以一般使用链式存储结构
需要两种结点:
一是表结点,来表示列表。二是原子结点,来表示原子。
因为列表不空时可以分解成表头和表尾,且根据一对确定的表头和表尾可以确定唯一的列表
因此表结点需要由:标志位、指示表头的指针域、指示表尾的指针域三部分构成
而原子结点只需要:标志位、值域两部分即可。
typedef enum{
ATOM,LIST}ElemTag;
typedef struct GLNode{
ElemTag tag;
union{
AtomType atom;
struct{
struct GLNode *hp,*tp}ptr;
};
}*GList;
该方法的几种情况
1.除空表的表头指针为空外,任何非空列表,其表头指针都指向一个表结点。
且hp指向列表表头,tp指向列表表尾(除非表尾为空,否则必为表结点)
2.容易分清列表中原子和子表所在层次
3.最高层表结点的个数即为表的长度
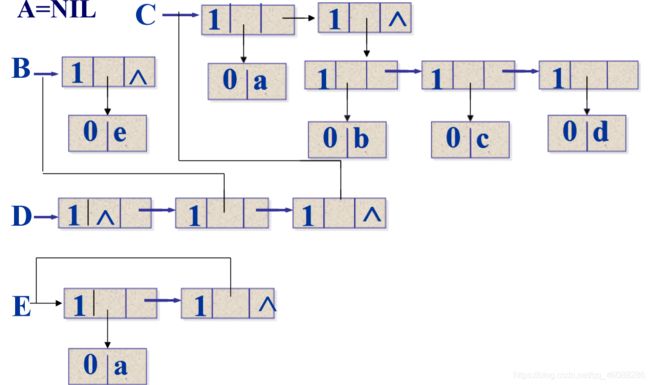 前面例子用这样的方式表示
前面例子用这样的方式表示
广义表的深度
即广义表中括号的重数
设非空广义表为LS=(a1,a2,…,an)
则求LS的深度可分解为n个子问题,即求ai的深度
若ai是原子,深度为0,;若ai是广义表,则继续分解。
LS的深度为ai深度中最大值+1
空表的深度为1