Ubuntu下调用YOLOv4
Ubuntu下调用YOLOv4
-
- 1.下载代码:
- 2.解压缩:
- 3.修改Makefile文件,如下图所示,找比往常最主要的区别就是修改LIBSO = 1:
- 4.Make,结束以后会出现libdarknet.so文件,如下图所示:
- 5.创建工程,修改工程内cmakelist.txt,修改下方标注区域为对应的位置,分别是工程名、opencv路径以及yolov4路径。
- 6.C++代码
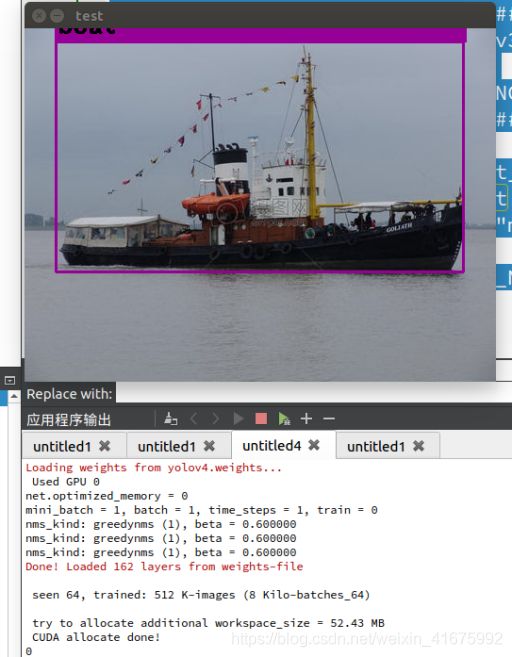
- 7.运行效果
之前有写过windows下调用YOLOv4,最近老师要求让在ubuntu下调用起来,毕竟还是ubuntu开发用的多一些,找了些资料,先总结一下,总体上来说和windows调用差别不是很大。最后还是希望opencv早日更新集成yolov4。
1.下载代码:
https://github.com/AlexeyAB/darknet
2.解压缩:
3.修改Makefile文件,如下图所示,找比往常最主要的区别就是修改LIBSO = 1:

4.Make,结束以后会出现libdarknet.so文件,如下图所示:

5.创建工程,修改工程内cmakelist.txt,修改下方标注区域为对应的位置,分别是工程名、opencv路径以及yolov4路径。
cmake_minimum_required(VERSION 2.8)
project(untitled4)
#opencv
add_definitions(-std=c++11)
ADD_DEFINITIONS(-DOPENCV)
ADD_DEFINITIONS(-DGPU)
######### opencv #########
set(OpenCV_DIR "/home/sun/opencv3/release")
find_package( OpenCV REQUIRED )
include_directories( ${
OpenCV_INCLUDE_DIRS} )
######### darknet #########
include_directories(/home/sun/qt_learning/15/darknet-master/include/)
find_library(darknet libdarknet.so /home/sun/qt_learning/15/darknet-master/)
add_executable(${
PROJECT_NAME} "main.cpp" )
target_link_libraries(${
PROJECT_NAME} ${
OpenCV_LIBS} ${
darknet})
6.C++代码
#include 7.运行效果