软件光栅化(确定3d三角形的三个顶点的坐标位置。)

计算三个点的坐标,那么熟悉模型的朋友应该知道要有两个数据,一个是顶点坐标数据,一个是顶点索引数据,在dx11和opengl中,都会把这两个数据缓存在硬件缓存区中,软件光栅化,我们拿到这两个数据,取出一个三角形的三个点的坐标,通过mvp变换就可以完成坐标得一部分转换,但是还有一部分是什么呢?如上图,乘上mvp矩阵后,也就相当于完成了投影变换,仅此而已,下边的步骤一般是硬件为我们完成的,但是软件光栅化不借助任何gpu,就cpu,那就开始一步步算嘛,从裁剪坐标系开始吧!
为什么要裁剪坐标系,因为在截头体内部,有时候模型在截头体内部放不下,超出部分需要被剪裁,这个,过程网上说的各种复杂,简单用代码来说就是
//检查齐次坐标同 cvv 的边界用于视锥裁剪
int transform_check_cvv(const vector_t*v) {
float w = v->w;
int check =0;
if(v->z<0.0f) check |=1;
if(v->z> w) check |=2;
if(v->x< -w) check |=4;
if(v->x> w) check |=8;
if(v->y< -w) check |=16;
if(v->y> w) check |=32;
return check;
}
在上述代码中可见,其实就是很简单做了一下判断是否在截头体内部,一个三角形可能完全在截头体内部,也可能完全在截头体外部,也可能部分在截头体内部,完全在内部的不用管嘛,但是完全在外边的需要剔除,部分在截头体外部的,需要舍去在外部的部分,重新把在内部的部分进行分割成两个三角形再次进行处理。
PS:当然上边代码只是简单判断下一个点是否在三角形内部啦,代码来自韦易笑大神
好了裁剪完了,就开始下一步进行透视除法喽,就是把一个点的(x, y, z, w)都除以w变成(x/w, y/w, z/w, 1)变成ndc中的坐标,
简单来说就是照着做就完事了,复杂来说,去看龙书有具体为什么这么做。。。(当然我写这个只是为了初学者脑子里有个大体步骤思路,不深究,容易带丢了给)
下边是视口变换原理推导,简单来说就是ndc变换到屏幕上的坐标

其中
ndc的坐标范围是

而viewport的坐标范围是
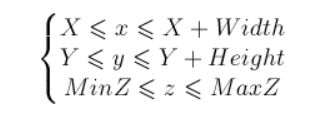
注:由上图知,视口的起点为(X, Y),宽高分别为Width和Height,x轴向右为正,y轴向下为正,y轴的方向与三维坐标正好相反。视口是一个2D平面,但是在viewport变换中,Z坐标也是跟着变换的,只是在这个图中没有体现。
先求变换矩阵的第一列
ndc中的左上角点(-1, 1, 0, 1)映射到viewport中的起点(X, Y, MinZ, 1),
ndc中的右上角点(1, 1, 0, 1)映射到viewport中的点(X+Width, Y, MinZ, 1),
假设变换矩阵的第一列为[x’, y’, z’, 1]T据矩阵乘法有
[-1, 1, 0, 1]* [x’, y’, z’, 1]T = X
[1, 1, 0, 1]* [x’, y’, z’, 1]T = X+Width
对应的两个方程为
-1*x’ + 1*y’ + 0*z’ + 1*w’ = X
1*x’ + 1*y’ + 0*z’ + 1*w’ = X+Width
解之得
x’ = Width/2
y’ = 0
z’ = 0
w’ = x + Width/2
再求第二列
列方程(这里省略了x’,z’,但结果不变,下同)
y’ + 1*w’=Y
-1*y’ + 1*w’=Y+Height
解之得
y’ = -Height/2
w’ = Y + Height/2
最后求第三列
列方程
0*z’ + 1*w’ = MinZ
1*z’ + 1*w’ = MaxZ
解之得
z’ = MaxZ – MinZ
w’ = MinZ
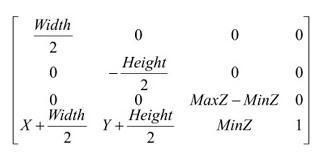
组合以上各列,得到视口变换矩阵