opencv——检测四边形的四个角点
#include "stdio.h"
#include "cv.h"
#include "highgui.h"
#include "Math.h"
#define max_corners 4
#define C CV_PI /3
int Otsu(IplImage* src);
int main(int argc, char*argv[])
{
IplImage* img = cvLoadImage("C:\\Users\\aoe\\Desktop\\xiangmu10\\fffffffff.jpg", 0);
cvNamedWindow("img", 1);
cvShowImage("img", img);
IplImage* dst = cvCreateImage(cvGetSize(img), 8, 1);
int threshold = Otsu(img);//最大类间方差阈值分割
printf("threshold = %d\n", threshold);
cvThreshold(img, dst, threshold, 255, CV_THRESH_BINARY);
cvNamedWindow("dst", 1);
cvShowImage("dst", dst);
CvRect roi = cvRect(30, 30,120,120);//去除复杂背景
IplImage* img1 = cvCreateImage(cvGetSize(dst), dst->depth, dst->nChannels);
for (int y = 0; y < img1->height; y++)
{
for (int x = 0; x < img1->width; x++)
{
CvScalar cs = (255);
cvSet2D(img1, y, x, cs);
}
}
CvRect roi1 = cvRect(30, 30, 120, 120);
cvNamedWindow("img1");
cvShowImage("img1", img1);
cvSetImageROI(dst, roi);
cvSetImageROI(img1, roi1);
cvCopy(dst, img1);
cvResetImageROI(dst);
cvResetImageROI(img1);
cvNamedWindow("result", 1);
cvShowImage("result", img1);
IplImage*edge = cvCreateImage(cvGetSize(img1), 8, 1);//canny边缘检测
int edgeThresh = 1;
cvCanny(img1, edge, edgeThresh, edgeThresh * 3, 3);
cvNamedWindow("canny", 1);
cvShowImage("canny", edge);
int count = 0;
for (int yy = 0; yy < edge->height; yy++)//统计边缘图像中共有多少个黑色像素点
{
for (int xx = 0; xx < edge->width; xx++)
{
//CvScalar ss = (255);
double ds = cvGet2D(edge, yy, xx).val[0];
if (ds == 0)
count++;
}
}
int dianshu_threshold = (176*144-count)/ 4;//将白色像素点数的四分之一作为hough变换的阈值
IplImage* houghtu = cvCreateImage(cvGetSize(edge), IPL_DEPTH_8U, 1);//hough直线变换
CvMemStorage*storage = cvCreateMemStorage();
CvSeq*lines = 0;
int i,j,k,m,n;
while (true)//循环找出合适的阈值,使检测到的直线的数量在8-12之间
{
lines = cvHoughLines2(edge, storage, CV_HOUGH_STANDARD, 1, CV_PI / 180, dianshu_threshold, 0, 0);
int line_number = lines->total;
if (line_number <8)
{
dianshu_threshold = dianshu_threshold - 2;
}
else if (line_number > 12)
{
dianshu_threshold = dianshu_threshold +1;
}
else
{
printf("line_number=%d\n", line_number);
break;
}
}
int A = 10;
double B = CV_PI / 10;
while (1)
{
for (i = 0; i total; i++)//将多条非常相像的直线剔除
{
for (j = 0; j < lines->total; j++)
{
if (j != i)
{
float*line1 = (float*)cvGetSeqElem(lines, i);
float*line2 = (float*)cvGetSeqElem(lines, j);
float rho1 = line1[0];
float threta1 = line1[1];
float rho2 = line2[0];
float threta2 = line2[1];
if (abs(rho1 - rho2) < A && abs(threta1 - threta2) < B)
cvSeqRemove(lines, j);
}
}
}
if (lines->total > 4)//剔除一圈后如何直线的数量大于4,则改变A和B,继续删除相似的直线
{
A = A + 1;
B = B + CV_PI / 180;
}
else
{
printf("lines->total=%d\n", lines->total);
break;
}
}
for (k= 0; k < lines->total; k++)//画出直线
{
float*line = (float*)cvGetSeqElem(lines, k);
float rho = line[0];//r=line[0]
float threta = line[1];//threta=line[1]
CvPoint pt1, pt2;
double a = cos(threta), b = sin(threta);
double x0 = a*rho;
double y0 = b*rho;
pt1.x = cvRound(x0 + 100 * (-b));//定义直线的终点和起点,直线上每一个点应该满足直线方程r=xcos(threta)+ysin(threta);
pt1.y = cvRound(y0 + 100 * (a));
pt2.x = cvRound(x0 - 1200 * (-b));
pt2.y = cvRound(y0 - 1200 * (a));
cvLine(houghtu, pt1, pt2, CV_RGB(0, 255, 255), 1, 8);
}
int num = 0;
CvPoint arr[8] = { { 0, 0 } };
for (m = 0; m < lines->total; m++)//画出直线的交点
{
for (n = 0; n < lines->total; n++)
{
if (n!= m)
{
float*Line1 = (float*)cvGetSeqElem(lines,m);
float*Line2 = (float*)cvGetSeqElem(lines,n);
float Rho1 = Line1[0];
float Threta1 = Line1[1];
float Rho2 =Line2[0];
float Threta2 = Line2[1];
if (abs(Threta1 - Threta2) > C)
{
double a1 = cos(Threta1), b1 = sin(Threta1);
double a2 = cos(Threta2), b2 = sin(Threta2);
CvPoint pt;
pt.x = (Rho2*b1 - Rho1*b2) / (a2*b1 - a1*b2);//直线交点公式
pt.y = (Rho1 - a1*pt.x) / b1;
cvCircle(houghtu, pt, 3, CV_RGB(255, 255, 0));
arr[num++] = pt;//将点的坐标保存在一个数组中
}
}
}
}
printf("num=%d\n", num);
printf("arr[0].x=%d\n", arr[0].x);
printf("arr[0].y=%d\n", arr[0].y);
printf("arr[1].x=%d\n", arr[1].x);
printf("arr[1].y=%d\n", arr[1].y);
printf("arr[2].x=%d\n", arr[2].x);
printf("arr[2].y=%d\n", arr[2].y);
printf("arr[3].x=%d\n", arr[3].x);
printf("arr[3].y=%d\n", arr[3].y);
printf("arr[4].x=%d\n", arr[4].x);
printf("arr[4].y=%d\n", arr[4].y);
printf("arr[5].x=%d\n", arr[5].x);
printf("arr[5].y=%d\n", arr[5].y);
printf("arr[6].x=%d\n", arr[6].x);
printf("arr[6].y=%d\n", arr[6].y);
printf("arr[7].x=%d\n", arr[7].x);
printf("arr[7].y=%d\n", arr[7].y);
CvPoint arr1[8] = { { 0, 0 } };//将重复的角点剔除
int num1 = 0;
for (int r = 0; r < 8; r++)
{
int s = 0;
for (; s < num1; s++)
{
if (abs(arr[r].x - arr1[s].x) <= 2 && abs(arr[r].y - arr1[s].y) <= 2)
break;
}
if (s == num1)
{
arr1[num1] = arr[r];
num1++;
}
}
printf("num1=%d\n", num1);
printf("arr1[0].x=%d\n", arr1[0].x);
printf("arr1[0].y=%d\n", arr1[0].y);
printf("arr1[1].x=%d\n", arr1[1].x);
printf("arr1[1].y=%d\n", arr1[1].y);
printf("arr1[2].x=%d\n", arr1[2].x);
printf("arr1[2].y=%d\n", arr1[2].y);
printf("arr1[3].x=%d\n", arr1[3].x);
printf("arr1[3].y=%d\n", arr1[3].y);
printf("arr1[4].x=%d\n", arr1[4].x);
printf("arr1[4].y=%d\n", arr1[4].y);
printf("arr1[5].x=%d\n", arr1[5].x);
printf("arr1[5].y=%d\n", arr1[5].y);
printf("arr1[6].x=%d\n", arr1[6].x);
printf("arr1[6].y=%d\n", arr1[6].y);
printf("arr1[7].x=%d\n", arr1[7].x);
printf("arr1[7].y=%d\n", arr1[7].y);
for (int w = 0; w < 4; w++)
{
CvPoint ps;
ps = arr1[w];
cvCircle(img, ps, 3, CV_RGB(255,0,0));
}
cvNamedWindow("img", 1);
cvShowImage("img", img);
cvNamedWindow("houghtu", 1);
cvShowImage("houghtu", houghtu);
cvWaitKey(-1);
cvReleaseImage(&img);
cvReleaseImage(&dst);
cvDestroyWindow("dst");
return 0;
}
int Otsu(IplImage* src)
{
int height = src->height;
int width = src->width;
//histogram
float histogram[256] = { 0 };
for (int i = 0; i < height; i++)
{
unsigned char* p = (unsigned char*)src->imageData + src->widthStep * i;
for (int j = 0; j < width; j++)
{
histogram[*p++]++;
}
}
//normalize histogram
int size = height * width;
for (int i = 0; i < 256; i++)
{
histogram[i] = histogram[i] / size;
}
//average pixel value
float avgValue = 0;
for (int i = 0; i < 256; i++)
{
avgValue += i * histogram[i]; //整幅图像的平均灰度
}
int threshold;
float maxVariance = 0;
float w = 0, u = 0;
for (int i = 0; i < 256; i++)
{
w += histogram[i]; //假设当前灰度i为阈值, 0~i 灰度的像素(假设像素值在此范围的像素叫做前景像素) 所占整幅图像的比例
u += i * histogram[i]; // 灰度i 之前的像素(0~i)的平均灰度值: 前景像素的平均灰度值
float t = avgValue * w - u;
float variance = t * t / (w * (1 - w));
if (variance > maxVariance)
{
maxVariance = variance;
threshold = i;
}
}
return threshold;
} 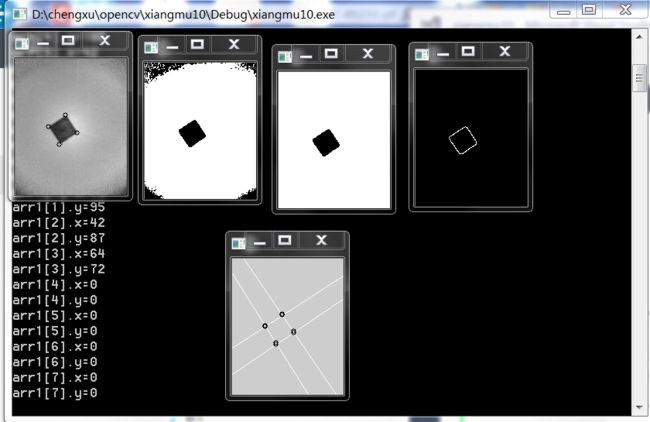
主要思想:最大阈值分割——去掉周围嘈杂背景——canny边缘检测——hough变换——求直线交点