
1769年,法国人N·J·居纽设计制造出了一辆三轮车,这被公认为汽车发展的起点。
与现代汽车不同是的,这辆被命名为“卡布奥雷”的载具由蒸汽驱动,通过车载锅炉产生的热气推动车轮转动。
由于体型过大(车长7.32m,车高2.2m)且极不实用(每前进12-15min需停车加热15min,运行速3.5-3.9km/h),这辆汽车并没有投入商用。
此后的一百余年里,各国发明家利用蒸汽动力,先后设计出了多种不同类型的蒸汽汽车,并广泛应用于铁路与船舶运输领域。
1885年10月,真正现代意义上的汽车由德国人卡尔·本茨(1844~1929)研制成功。与以往汽车不同,卡尔·本茨研制的汽车由内燃机驱动,彻底摆脱了蒸汽机功率体积比、功率重量比较小的缺点,一举奠定了现代汽车设计的基调。
进入20世纪80年代,汽车已成为一种必需品,走进千家万户的日常生活中。所应用的技术也历经了多次变革,逐渐步入电子化、智能化时代。
时至今日,在环境感知、精准定位、决策与规划、控制与执行、高精地图等技术的加持下,自动驾驶技术开始成为整个汽车产业的最新发展方向,并在某些领域取得了不错的应用成果。
本文将从自动驾驶技术诞生开始,详细介绍自动驾驶的“昨天、今天与明天”。
一.昨天:探索与技术积累
1.国外的探索
1939年,整个世界处于经济大萧条后的恢复期,一切处于百废待兴之中。
同年4月,作为科技界盛会的世博会在纽约正式开幕。展会期间,通用汽车公司修建了一座名为“未来世界(Futurama)”的模拟城市展厅,用于展示他们对未来交通形态的幻想。
在模拟城市中,设有一个专门的交通管理中心,用于指挥处理城市交通。城市内部运行着322辆各类型汽车,这些汽车均配备了独立的声音系统。所有道路与交叉路口都按照新的交通环境进行了重新设计,整体上形成了一个全新的高速公路体系。

通用汽车在这座模拟城市的基础上,提出了对后世影响深远的自动高速公路(Automated Highway System,AHS)的概念,并做出了“20世纪60年代,高速公路将具有电子轨道,与汽车的自动驾驶系统相配合,实现无人驾驶,直到驶出高速公路才切换回司机驾驶”的预言。
值得一提的是,通用汽车在Futurama高速公路体系中,还提出了以下四条基本原则:
1)通过增加道路的横截面积,来容纳更多的交通流;
2)不同方向的交通流需要隔离开来;
3)将城市和小镇划分成不同的区域;
4)预设可以行驶的最大速度与最小速度,来进行交通控制。
以上这些原则目前已经成为交通行业的共识。
纽约世博会结束后,由于第二次世界大战等因素的影响,自动驾驶领域没有产生任何具有代表性的成果。直到1956年,在Motorama展览会上,通用推出了第一款具备自动驾驶功能的概念车Firebird II,自动驾驶领域终于迎来新的发展。
这辆被命名为“Firebird II”的汽车,是通用面向家庭的第二代概念汽车,使用了钛金属技术、电源盘式制动器、磁点火钥匙、独立控制的燃气涡轮动力等新概念,看上去像是一辆“火箭车”。这辆看似 “火箭” 的概念车有史以来第一次具备了自动导航系统。
两年后,也就是1958年,通用推出了第三代“Firebird III”。BBC 现场直播了基于车路协同的自动驾驶场景,高速公路上预埋的线缆与车端的接收器通过电子脉冲信号进行通讯,展示了未来高速公路的无人驾驶形态。
不过,通用推出的三代Firebird都因为各种各样的问题而没有商用,Firebird更像是一个技术概念验证品,而非自动驾驶汽车。
普遍被人认可的第一辆“自动驾驶”汽车是Stanford Cart(斯坦福车)。它最早建于1961年,由汉斯·莫拉维克(Hans Moravec)团队研发。
 Stanford Cart
Stanford Cart
汉斯·莫拉维克被誉为“人工智能最坚定的支持者”,在他的领导下,“斯坦福车”取得了诸多成就,比如可以利用摄像头和早期的人工智能系统来绕过障碍物。
值得一提的是,在“斯坦福车”研发的过程中,还出现过一件趣事。“斯坦福车”由远程图像操控,然而有一次它逃脱了控制,驶入了现实的道路中。当研发人员从监视器中看到一辆真实的车辆从 “斯坦福车” 边上呼啸而过时,不由地大吃一惊,于是追捕“叛逃机器人”成为人类探索自动驾驶历史上,永远值得铭记的一刻。
不过,虽然“斯坦福车”取得了很多成就,但也存在很多问题。受限于当时的硬件与软件水平,早期人工智能系统处理速度太慢,导致“斯坦福车”每移动一米就需要20分钟,这也意味着它并不具备任何商业使用的潜力,自动驾驶之路仍然处于初期探索之中。
时间进入到二十世纪六七十年代,随着软硬件条件的改善,尤其是计算机技术的发展,自动驾驶研究进入到一个新的阶段。
1969年,人工智能领域知名学者约翰·麦卡锡在一篇名为《电脑控制汽车》的文章中,描述了与现代自动驾驶汽车类似的应用场景。
麦卡锡提出的想法是,“自动司机”可以通过“电视摄像机输入数据,并使用与人类司机相同的视觉输入”来帮助车辆进行道路导航。
他在文章中详细解释道,用户可以输入目的地,来驱使汽车自动前往预设地点。同时也会存在额外的命令,可以让汽车自动改变目的地,例如在特定位置停留,或者可以在紧急情况下安全制动。从后世角度来看,自动驾驶技术的发展与麦卡锡所描述的场景基本吻合。
学者们的发声,在不同程度上也引起了国家层面的重视。20世纪70年代,众多科技发达国家开始重视自动驾驶技术的研究。
1984年,美国国防高级研究计划署(DARPA)与陆军合作,发起自主地面车辆(ALV)计划,这辆汽车可以在校园中自动行驶,不过车速并不快。
国家层面的重视,也带动了科研院校的关注。20世纪80年代开始,美国大学诸如卡内基·梅隆大学、斯坦福大学、麻省理工学院等开始加入到自动驾驶汽车的研究工作中。其中,以卡内基·梅隆大学研制的NavLab系列智能车辆最具有代表性。
NavLab-1系统于20世纪80年代建成。它可以实现图像处理、传感器信息融合、路径规划以及车体控制等功能。在典型结构化道路环境下,NavLab-1系统的速度为28km/h。
 NavLab-1
NavLab-1
此后的几十年间,NavLab又历经了多次技术更迭,目前NavLab-11系统是该系列的最新平台。其车体安装有工业级四核计算机,处理各种传感器传输来的信息,并把信息分送到各个子单元,最高车速可以达到102km/h。
2.国内的探索
相较于国外,国内学术界对于自动驾驶的研究稍晚,但也取得了不错的成果。
1978年,清华大学齐国光教授课题组开始研究自动驾驶相关课题。国内第一辆自动驾驶汽车是90年代初的ATB-1(Autonomous Test Bed-1),由北京理工大学、南京理工大学、国防科技大学、清华大学和浙江大学五家单位联合研制,这些院校后来成为了中国自动驾驶人才的摇篮。
3.小结
从20世纪30年代自动驾驶诞生至20世纪末期,无论国内还是国外,对自动驾驶都处于初期的研究以及技术积累阶段。
参与的主体主要以学者、学术机构和政府为主,商业机构较少涉足该领域,自动驾驶距离商业化应用遥遥无期。
二.今天:商业化探索与实践
- 国外的探索
进入21世纪,得益于人工智能技术的应用及推广,自动驾驶相关技术在环境感知、精准定位、决策与规划、控制与执行、高精地图与车联网 V2X 等方面实现了全面提升。越来越多的商业化机构开始参与到行业中,自动驾驶行业迎来新篇章。
2004年-2007年,美国国防部高级研究计划署(DARPA)举办了3届DARPA无人驾驶挑战赛。比赛中,很多车辆都使用了激光雷达、高精度的地理信息系统和惯性导航系统,直到今天这些仍然是很多无人车的标准配置。

2009年,发生了一件大事。科技巨头谷歌公司宣布,由斯坦福人工智能实验室前主任、谷歌街景的联合发明人Sebastian Thrun组建一支团队,主要研究无人驾驶技术。值得注意的是,Sebastian Thrun团队的机器人车辆Stanley,在2005年赢得了DARPA挑战赛。
谷歌公司的参与,也带动了其他厂商的热情。2013年开始,包括通用汽车、福特、奔驰、宝马在内的大型汽车公司纷纷下场,开始研发自己公司的自动驾驶汽车技术。
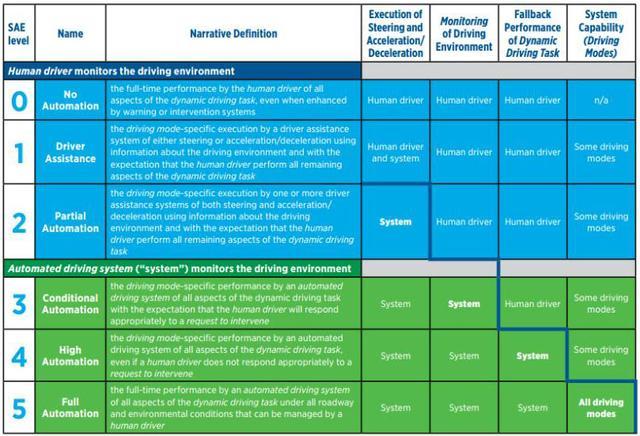
2014年,这是一个自动驾驶领域里,值得被铭记的年份。美国SAE International (国际汽车工程师学会)发布了SAE J3016标准。该标准将车辆分为Level 0-Level 5共6个级别,并针对道路机动车辆的自动化系统相关条款做了分类和定义,目前已经成为全球汽车业界评定自动驾驶汽车等级的通用标准:
Level 0:无自动化,由人类驾驶员全程操控汽车,但可以得到示警式或须干预的辅助信息。
Level 1:辅助驾驶,利用环境感知信息对转向或纵向加减速进行闭环控制,其余工作由人类驾驶员完成。
Level 2:部分自动化,利用环境感知信息同时对转向和纵向加减速进行闭环控制,其余工作由人类驾驶员完成。
Level 3:有条件自动化,由自动驾驶系统完成所有驾驶操作,人类驾驶员根据系统请求进行干预。
Level 4:高度自动化,由自动驾驶系统完成所有驾驶操作,无需人类驾驶员进行任何干预,但须限定道路和功能。
Level 5:完全自动化,由自动驾驶系统完成所有的驾驶操作,人类驾驶员能够应付的所有道路和环境,系统也能完全自动完成。
 SAE J3016标准
SAE J3016标准
伴随着自动驾驶汽车通用等级标准的制定以及核心技术实现跨越式发展(标志性事件是英特尔以153亿美元收购自动驾驶视觉芯片公司Mobileye),自动驾驶技术的商业化前景逐渐得到验证,越来越多的车企加入到自动驾驶的研发赛道中。
我们首先来看看特斯拉。
特斯拉的自动驾驶梦要从Autopilot开始,而Autopilot的故事则要从一条推特谈起。
2013年,特斯拉CEO埃隆·马斯克发布了一条推特,马斯克在这条推特中写道:“特斯拉要为Model S开发辅助驾驶系统,紧张的工作正在进行中。”这相当于变相官宣,特斯拉杀入自动驾驶行业了。

2015年10月,Autopilot由特斯拉正式推出,成为第一个投入商用的自动驾驶技术。
高德纳分析师Mike Ramsey对此分析道:“特斯拉的Autopilot是一个辅助驾驶系统,如果用行业术语称呼,我们把会它叫做高级安全系统。”
从事自动驾驶人机交互可用性研究的工程师Liza Dixon进一步解释道:“Autopilot是一款L2级自动驾驶系统,而这意味着它可以在特定条件下协助车主完成基本的驾驶任务,但绝非完全自动驾驶功能。”
此后的几年,Autopilot不断进化。目前,特斯拉的量产车上均已安装Autopilot 1.0、2.0或2.5硬件系统,其自动驾驶功能可通过OTA(空中下载)进行从Level 2到Level 4+的软件升级。目前,最新的Autopilot 已经具备了交通信号灯和停车标志自动检测功能。
除了Autopilot以外,特斯拉自动驾驶体系里还包括FSD(full self driving)系统。不过FSD目前仍处于研发过程中,未来将支持包括自动变道、自动泊车和召唤、红绿灯识别等功能。
马斯克的目标是在年底前,部署100万辆自动驾驶出租车。不过,由于相关技术尚处于开发阶段,以及相关基础设施建设及监管等因素的影响,特斯拉的自动驾驶出租车年度计划大概率难以实现。
看完特斯拉,我们再来看一下谷歌。
2016年,谷歌成立了独立公司Waymo,将自动驾驶业务完全独立出来。
Waymo采用的自动驾驶技术,是单车智能技术路线,即时通过传感器、处理器和控制器去感知识别、做出决策并进行控制。2018年12月,Waymo首席执行官John Krafcik在内部信中宣布自动驾驶服务正式商用,并推出了自动驾驶首个用于服务乘客的商业叫车服务-Waymo One。
 Waymo One
Waymo One
为了快速扩充自动驾驶车队阵容,Waymo分别向捷豹、菲亚特-克莱斯勒下了20000辆捷豹I-PACE车型以及62,000辆Pacifica混动车的订单。目前,Waymo已积累了行业内最远的行驶里程,估值超过300亿美元。
除了谷歌、特斯拉以外,通用汽车旗下的自动驾驶部门Cruise、福特和大众共同掌控的Argo、安波福和Mobileye、Uber、俄罗斯的Yandex等都是国外自动驾驶领域,表现较为出色的企业。
2.国内的探索
看完了国外,我们把目光转向国内。
进入新世纪以来,经济的腾飞带动了科技的发展,国内相关企业机构对自动驾驶投入了更多的关注目光,并取得了诸多成就。
2012年,军事交通学院改装了一辆越野车,并命名为“军交猛狮Ⅲ号”。通过车顶安装的复杂视听感知系统,以及车内安装的两台计算机和一台备用计算机组成的执行系统,实现了“军交猛狮Ⅲ号”自主进行刹车、油门、制动、换挡等动作。该车于2012年11月24日,在京津高速完成114公里的测试。
企业层面,国内自动驾驶领域最具代表性的当属百度。
百度的自动驾驶之路,开始于2013年。
2013年百度成立深度学习实验室IDL(Institute of Deep Learning),是百度的首个前瞻性研究机构。同年,百度自动驾驶研发团队正式组建,相关项目正是源自于IDL实验室。百度自动驾驶的技术核心是“百度汽车大脑”,包括高精度地图、定位、感知、智能决策与控制四大模块。
2015年,百度自动驾驶研发提速,同年成立自动驾驶事业部。2015年12月初,百度自动驾驶汽车在北京进行自动驾驶测跑,实现多次跟车减速、变道、超车、上下匝道、调头等复杂驾驶动作,完成了进入高速到驶出高速不同道路场景的切换,最高车速达到 100km/h。
2017年4月,百度正式公布了Apollo计划。按照设想,Apollo计划将打破过去分级标准的限制,提供从智能辅助驾驶走向全智能驾驶的能力,形成适合主机厂深度参与的智能驾驶发展路径。
2018年7月,百度在第二届百度AI开发者大会上宣布,首款Level 4级自驾巴士“阿波龙”已经量产下线。“阿波龙”会被投放到北京、深圳、武汉等城市,在机场、工业园区、公园等行驶范围相对固定的场所开始商业化运营。2019年8月,百度与一汽红旗联合研发的Robotaxi(自动驾驶出租车)在长沙投入试运营。
 “阿波龙”巴士
“阿波龙”巴士
除了百度以外,目前国内很多品牌均已实现L2级自动驾驶车的量产,比如上汽、小鹏、蔚来等。这些自动驾驶汽车基本已实现AEB自动刹车、ACC自适应巡航、ICC智能领航、APA自动泊车辅助、车道保持/偏离辅助控制等功能。
国家层面,相关法律政策也在不断推进中。
2016年,北京市率先发布了《北京市关于加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》和《北京市自动驾驶车辆道路测试管理实施细则(试行)》两个文件,从法律层面肯定了自动驾驶汽车的市场定位。此后,上海、重庆、深圳、广州等地纷纷推出当地的路测政策和指南。
2020年3月9日,工信部官网公示了《汽车驾驶自动化分级》推荐性国家标准报批稿,并拟于2021年1月1日起开始实施。这被认为是与SAE自动驾驶分级标准相似的,国标自动驾驶分级标准。
《汽车驾驶自动化分级》基于驾驶自动化系统能够执行动态驾驶任务的程度、执行动态驾驶任务中的角色分配以及有无设计运行条件限制,将驾驶自动化分成0-5级。
0级驾驶自动化(应急辅助):驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。
1级驾驶自动化(部分驾驶辅助):驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。
2级驾驶自动化(组合驾驶辅助):驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。
3级驾驶自动化(有条件自动驾驶):驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务。
4级驾驶自动化(高度自动驾驶):驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
5级驾驶自动化(完全自动驾驶):驾驶自动化系统在任何可行驶条件下持续地执行全部动态驾驶任务和执行动态驾驶任务接管。

与SAE标准相比,《汽车驾驶自动化分级》在部分内容上存在不同。
首先,SAE标准下将AEB等安全辅助功能和非驾驶自动化功能都放在0级,称为无驾驶自动化,中国版标准则叫做应急辅助,驾驶员能够掌握驾驶权,系统可感知环境,并提供报警、辅助或短暂介入驾驶,作为一个安全的基础分支,和非驾驶自动化功能分开,更加便于理解。
其次,中国版标准针对0-2级自动驾驶,规定的是“目标和事件探测与响应”由驾驶员及系统协作完成,而在SAE标准下,L0级至L2级自动驾驶汽车的OEDR(目标和事件检测,以及决策任务)全部由人类驾驶员完成。
最后,中国版标准在3级中明确增加对驾驶员接管能力监测和风险减缓策略的要求,明确最低安全要求,减少实际应用的安全风险。
这份国标新规的出台,不仅弥补了政策层面的空白,为我国后续自动驾驶相关法律、法规、强制类标准的出台提供有力的支撑,同时也为自动驾驶技术大规模商业化应用落地提供了至关重要的先决条件,推动了行业的发展。
3.小结
进入新世纪以来,随着计算机技术以及人工智能技术的革新,自动驾驶技术迎来跨越式发展。无论国内还是国外,越来越多的商业机构开始参与到自动驾驶行业中,优秀商业化应用案例频出。
按照SAE标准,目前自动驾驶行业整体水平处于高级辅助驾驶的Level 2阶段。L3、L4尚处于研发以及测试过程中。
 自动驾驶发展阶段(来源:36氪)
自动驾驶发展阶段(来源:36氪)
三.明天:长路漫漫但未来可期
对于自动驾驶行业未来的发展,国内与国外均有着比较明确的规划。
2018年,欧盟委员会公布了自动驾驶时间进度表。按照规划,2020年将实现在高速公路上自动驾驶,在城市中心区域实现低速自动驾驶,2030年普及完全自动驾驶。
国内层面,我国发布的《节能与新能源汽车技术路线图》中指出,到2020年,驾驶辅助/部分自动驾驶车辆市场占有率将达50%;到2025年,高度自动驾驶车辆市场占有率将达约15%;到2030年,完全自动驾驶车辆市场占有率将近10%。
不过,自动驾驶的发展并非一帆风顺,实现完全自动驾驶的路上总会遇到诸多挫折。
2018年3月,Uber自动驾驶测试车在亚利桑那州坦佩市郊区,与一名横穿马路的中年妇女相撞,事故导致该女子不幸身亡。这是人类历史上第一起自动驾驶汽车致人死亡事件。
同月,在加利福尼亚州山景城101高速公路上,一辆高速行驶中的特斯拉 Model X与路边隔离带相撞,导致车头部分完全损毁,并引发电池起火,驾驶员不幸遇难。此外,Waymo也发生了几起事故,包括一位安全员睡着导致的车祸。
以上这些事故表明,自动驾驶技术距离成熟应用还有一段漫长而艰辛的发展历程,轻言L4级量产、忽略安全大跃进式发展并不可取。自动驾驶汽车在技术、政策等层面还面临诸多挑战。
技术层面,目前实现自动驾驶主要依靠“感知-决策-执行”的方式,人工智能技术在其中扮演着十分重要的角色。
以深度学习为代表的计算机视觉技术,可以满足视觉感知高精度的需求,提高自动驾驶汽车面对复杂交通环境时的决策能力。
相关数据显示,深度学习在算法和样本量足够的情况下,视觉感知的准确率可以达到 99.9%以上,而传统视觉算法的检测精度极限在93%左右,人感知的准确率一般是95%左右。
换言之,样本数据越多,识别的精度就越高,样本的数量是影响深度学习精度重要的一个因素。
然而,与取得阶段性成熟的算法、算力相比,基础数据服务行业的发展略有滞后,高质量、场景化、精细化的标注数据集较为欠缺,行业内部缺少像曼孚科技这样专业的数据服务供应商。在某种程度上,高质量标注数据集的欠缺,已成为阻碍自动驾驶汽车大规模商业化落地应用的关键因素之一。
百度在开放ApolloScape时,也谈到了这一点:
“虽然国外有不少可供选择的数据集,但是国内的路况复杂程度显然与国外不同。虽然我们也经常可以听到一些企业宣布其自动驾驶汽车开始公测,但大多数测试都是在较简单的路况下进行的,在复杂路况下,自动驾驶还远远达不到上路标准,这其中的很多问题仅依靠技术手段很难解决,需要大规模精准数据集的帮助,这也是百度决定开放ApolloScape的初衷。百度希望通过公开的方式,吸引更多企业和开发者利用并补充数据集,进而提高自动驾驶的感知能力。”
除了技术层面以外,政策层面也面临诸多挑战。
目前没有任何一个国家对自动驾驶汽车专门制定完善的法律法规,自动驾驶汽车上路行驶缺乏部分法理上的支持。此外,自动驾驶汽车在实际行驶过程中难免会出现事故,如何划分事故责任,做到公正裁决都需要有明确的法律政策来说明。
总而言之,我们丝毫不怀疑自动驾驶拥有一个光明的未来。无论是在改善交通安全、治理交通堵塞,还是在实现节能减排上,自动驾驶技术都有着不可替代的价值。
但不可否认的是,自动驾驶汽车的商业化尚处于开启阶段,亟待解决的问题仍有很多。未来长路漫漫,但也一切可期。
参考资料:
1.Aminer《人工智能之自动驾驶研究报告》
2.36氪《自动驾驶行业研究报告》
3.部分实物图片来源于网络