win10+vs2017+opencv4.5.0+opencv_contrib-4.5.0+cuda源码编译详细教程
大家第一次安装opencv的时候一定要一定要一定要认真看一遍教程,很多错误是自己不认真仔细导致的,特别看安装过程的注意事项,等一定了解和熟练后再总结一套自己的教程,这样对自己以后安装东西有很大的帮助
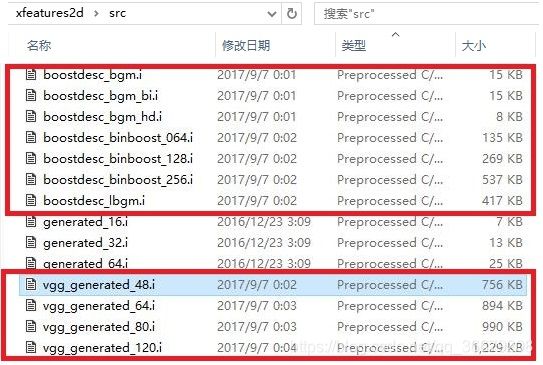
ALL-BULID时候如果遇到错误204error C1083: 无法打开包括文件: “boostdesc_bgm.i”: No such file or directoryD:\opencv-4.5.0\source\opencv_contrib-master\modules\xfeatures2d\src\boostdesc.cpp6461 opencv_xfeatures2d 错误 248 error C1083: 无法打开包括文件: “opencv2/xfeatures2d/cuda.hpp”: No such file or directoryD:\opencv-4.5.0\source\modules\stitching\include\opencv2\stitching\detail\matchers.hpp521 opencv_stitching 错误 239 error C1083: 无法打开包括文件: “vgg_generated_120.i”: No such file or directoryD:\opencv-4.5.0\source\opencv_contrib-master\modules\xfeatures2d\src\vgg.cpp4741 opencv_xfeatures2d 错误 572error LNK1104: 无法打开文件“..\..\lib\Debug\opencv_xfeatures2d320d.lib”D:\opencv-4.5.0\bulid\modules\xfeatures2d\LINKopencv_perf_xfeatures2d 错误 631 error LNK1104: 无法打开文件“..\..\lib\Debug\opencv_xfeatures2d320d.lib”D:\opencv-4.5.0\bulid\modules\xfeatures2d\LINKopencv_test_xfeatures2d
在以下目录添加 : D:\opencv-4.5.0\source\opencv_contrib-master\modules\xfeatures2d\src
下载地址https://github.com/opencv/opencv_3rdparty/tree/contrib_xfeatures2d_vgg_20160317
百度网盘:https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA 密码e1wc
fatal error: features2d/test/test_detectors_regression.impl.hpp
step.1 进入opencv源码目录~/opencv/modules/features2d/test/,拷贝test_detectors_regression.impl.hpp 及 test_descriptors_regression.impl.hpp 到 ~/opencv_contrib/modules/xfeatures2d/test/下
step.2 编辑 test_features2d.cpp ,修改include文件地址
// #include "features2d/test/test_detectors_regression.impl.hpp"
// #include "features2d/test/test_descriptors_regression.impl.hpp"
// 修改文件地址如下
#include "test_detectors_regression.impl.hpp"
#include "test_descriptors_regression.impl.hpp"
根据提示的缺少文件从/opencv/modules/features2d/test中拷贝如下文件到/opencv_contrib/modules/xfeatures2d/test/
test_detectors_invariance.impl.hpp
test_descriptors_invariance.impl.hpp
test_invariance_utils.hpp
然后修改test_rotation_and_scale_invariance.cpp文件
// #include "features2d/test/test_detectors_invariance.impl.hpp" // main OpenCV repo
// #include "features2d/test/test_descriptors_invariance.impl.hpp" // main OpenCV repo
#include "test_detectors_invariance.impl.hpp" // main OpenCV repo
#include "test_descriptors_invariance.impl.hpp" // main OpenCV repo
准备工具
cmake、vs2017、opencv4.5.0、opencv_contrib-4.5.0、cuda、cudnn
一、下载安装cuda、cudn
参考链接:https://blog.csdn.net/fengxinzioo/article/details/105646969
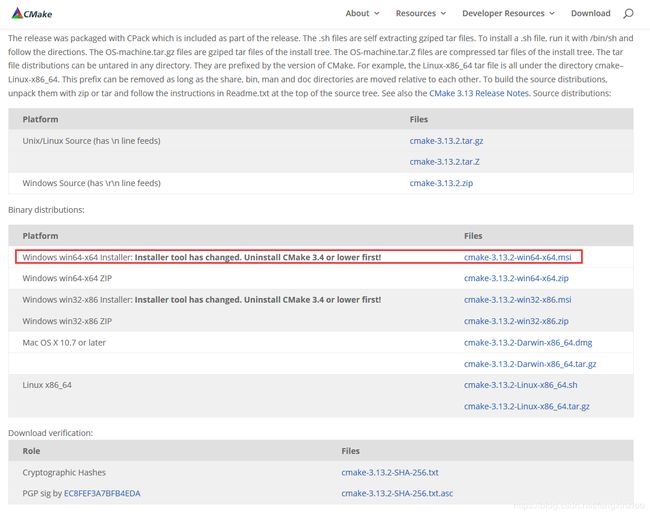
二、安装cmake
官方地址https://cmake.org/download/
下载安装cmake-3.13.2-win64-x64.msi,默认安装。
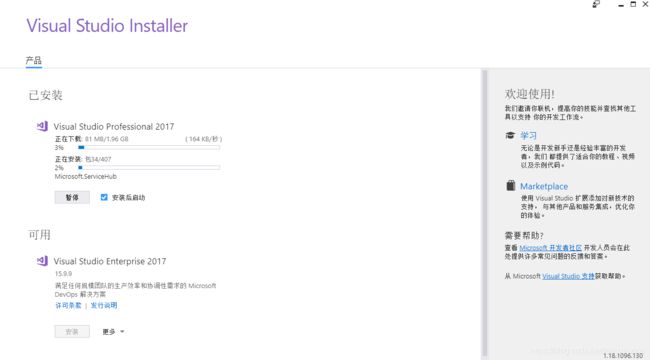
三、安装VS2017
这里直接在微软官网下载即可。链接: https://docs.microsoft.com/en-us/visualstudio/releasenotes/vs2017-relnotes
其中三个版本都可以选,Community 2017是免费社区版本,Professional 2017和Enterprise 2017是付费版,功能好像没有区别,我这里选择的是Professional版本。
付费版可以使用密匙激活,这里提供两个密匙,如果不能用了就网上找,很多的:
Professional 2017:KBJFW-NXHK6-W4WJM-CRMQB-G3CDH
Enterprise 2017:NJVYC-BMHX2-G77MM-4XJMR-6Q8QF


四、opencv_contrib下载安装
1、下载链接: https://github.com/opencv/opencv_contrib/releases.
2、选择你的opencv对应的contrib版本,例如我装的是opencv4.5.0,对应就下载opencv_contrib-4.5.0.zip。下载完成之后直接解压即可,留着cmake使用。
opencv_contrib-4.5.0.zip解压完如下图:

五、提取opencv4.5.0
1、Opencv官网:https://opencv.org/releases.html

2、下载后将opencv-4.5.0.zip解压
六、 CMake 编译
windows安装opencv4.1.1过程中ffmpeg、ippicv、face_landmark_model下载出错解决办法:https://blog.csdn.net/fengxinzioo/article/details/104919888
或者第一次cmake的configure之后,在where is build the binaries位置里面有个CMakeDownloadLog.txt,将里面下载链接复制到浏览器或者迅雷中进行下载,将其和where is the source code里面的.cache文件夹里面内容相对应,可以把这篇教程后面第一个百度网盘里面的.cache.rar压缩包解压放到opencv源码文件夹中就可以了。
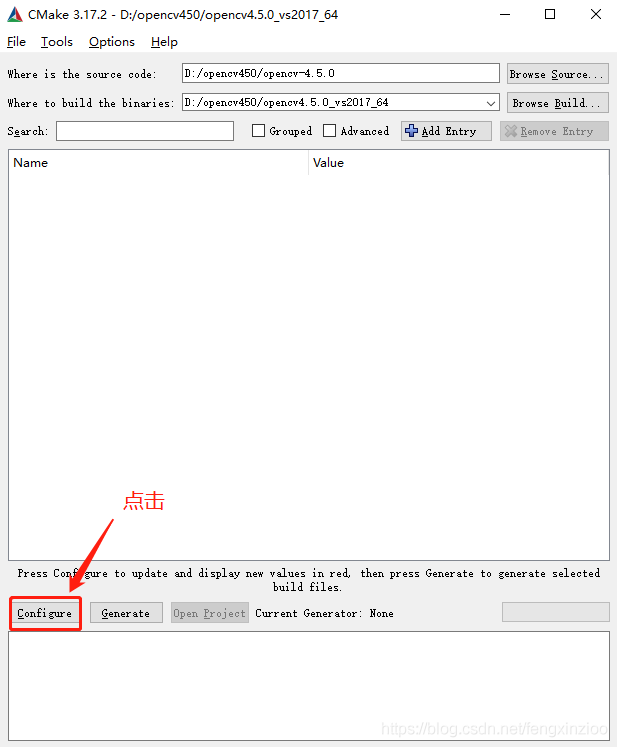
1、打开CMake,下图第一个红框输入Opencv(我的是opencv4.5.0)的sources目录(注意:不是opencv_contrib的目录,原来自己opencv的目录);第一个红框输入你自定义的输出目录。where is build the binaries那个位置是你编译opencv保存的文件夹位置,按照自己情况进行选择,最后点左下角的Configure

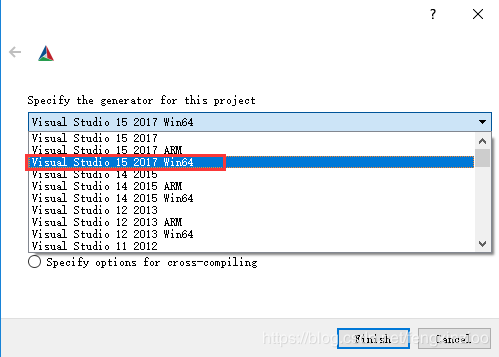
2、选择对应vs的版本,64位系统选择Win64,默认的是Win32。

3、然后就是等待了。之后显示Configuring done第一次源码配置就完成了。
在cmake的搜索框里面搜索带cuda的关键字,全部选上

选择OPENCV_EXTRA_MODULES_RATH一项,添加你刚刚解压的opencv_contrib中的modules目录,其中要把OPENCV_ENABLE_NONFREE(下图红框上面一行)选上。
注意路径不要复制,需要通过cmake来选择路径!

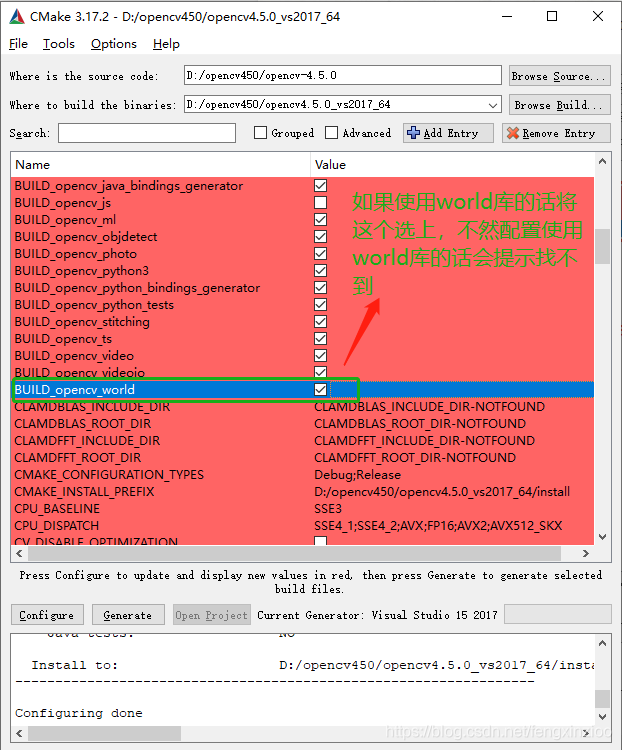
将build_opencv_world选上,将所有opencv的库都编译在一起不需要自己一一添加每个小模块,利于移植算法的时候遗忘一些库。
再次单击 Configure,完成后将cuda_arch_bin即显卡的算力内容改成自己显卡的算力,如下图所示
查看自己N卡显卡算力网址:https://developer.nvidia.com/cuda-gpus


再次单击 Configure完成后,点击generate,之后会提示generating done,说明cmake编译成功了。点击open project进行编译部分了。

或者完成之后在你的输出文件夹中找到OpenCV.sln文件进行编译。

七、 VS2017 编译
1、使用VS2017打开刚刚编译工程后,会反应一段时间如下图所示:
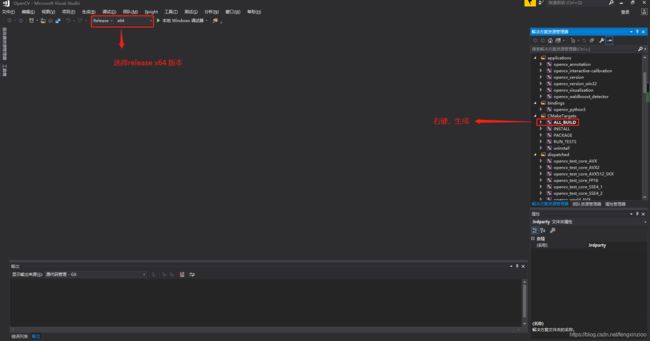
2、然后如图所示点击ALL_BUILD-->生成,这得等一段时间 ,如下图所示

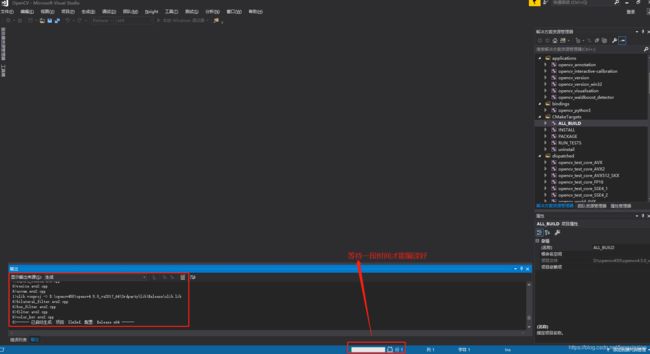
3、完成后,如下图所示:

4、“解决方案资源管理器—>CMakeTargets—>INSTALL—>生成”然后又是等好一会儿

完成后
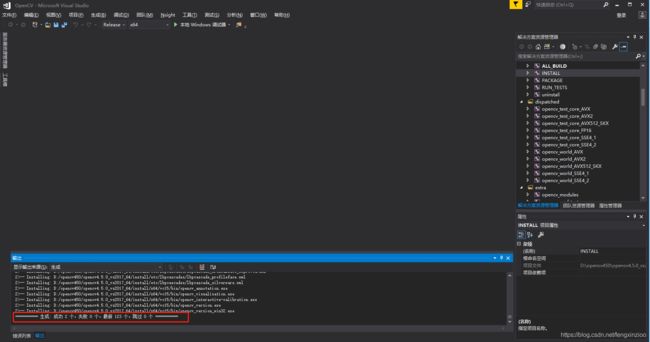
5、最后到自定义的文件夹确认一下,找到install文件夹,进去查看里面的内容(如下图,注:对于后边配置环境,install文件夹作用就像配置opencv4.5.0时的build文件夹一样):

八、 环境配置
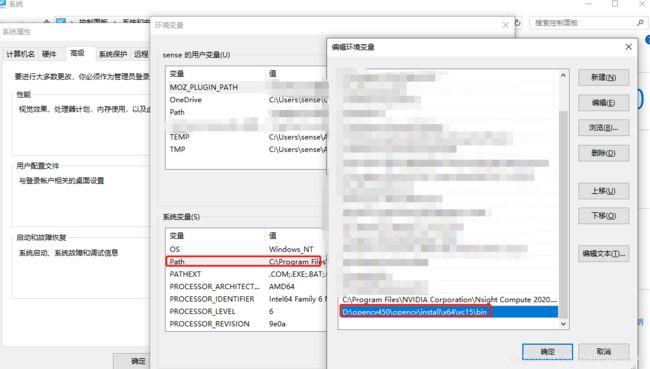
1、 环境变量配置
- 右键电脑【属性】
- 【高级系统设置】
- 【环境变量】
- 【系统变量】【Path】
编译目录“ D:\opencv450\opencv4.5.0_vs2017_64\install\x64\vc15\bin” 的完整路径 (如下图),根据你自己Cmake时的路径进行修改。 - 环境变量配置好后,一定要重启系统!!!!
2、配置相关目录
1、打开VS2017新建一个空项目 输入名字,选择生成文件夹,然后选择“空项目”,直接确定就可以了。


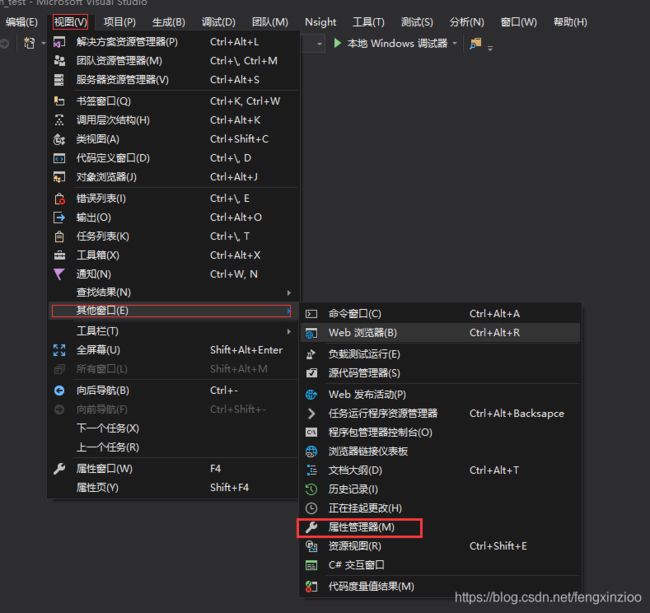
确定之后就直接进到这个界面,先将Debug的X86改成release X64

然后找到属性管理器 ,如下图所示:
创建属性表,如下图所示
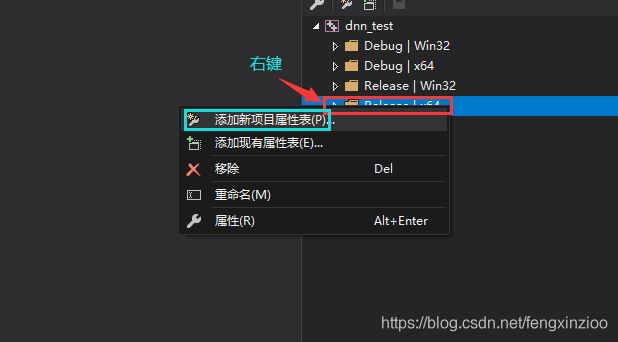
将属性表进行命名,根据你容易记住的命名风格来。

打开刚才建好的属性表

2、include目录
双击属性表,在通用属性—>VC++目录—>包含目录中添加:




D:\opencv450\opencv4.5.0_vs2017_64\install\include
D:\opencv450\opencv4.5.0_vs2017_64\install\include
根据你的路径进行修改
没有了以前的“…opencv4.5.0\build\include\opencv”这一条。
3、然后是添加lib目录,在通用属性—>VC++目录—>库目录中添加:


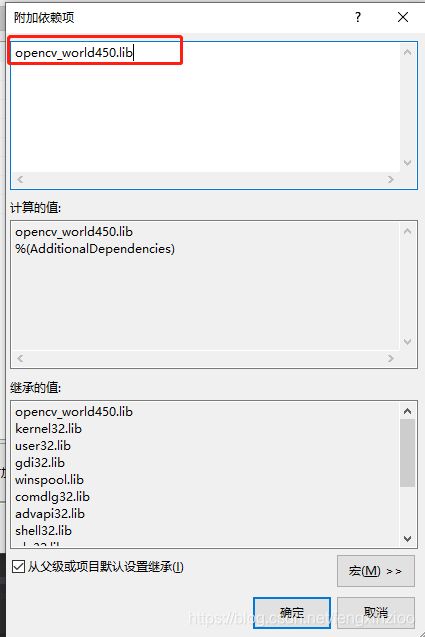
4、在通用属性—>链接器—>输入—>附加的依赖项中添加opencv_world450.lib(这个是cmake的时候编译成world格式的):

其他版本按照自己的版本号更改数字“450”为自己对应的版本即可(450意为4.5.0版本的release模式,debug模式会带有d)。
添加的依赖,如下图所示:
译好的opencv dll和lib库百度网盘:
链接:https://pan.baidu.com/s/1pA5zwH2WK5hhaAdJkQmJLg
提取码:t8vw
九、dnn yolo使用cuda加速程序验证
验证代码如下:
-
#include
-
#include
-
#include
-
#include
-
#include
-
#include
-
#include
-
-
#include
-
#include
-
#include
-
-
#include
-
#include
-
-
constexpr
float CONFIDENCE_THRESHOLD =
0;
-
constexpr
float NMS_THRESHOLD =
0.4;
-
constexpr
int NUM_CLASSES =
80;
-
-
// colors for bounding boxes
-
const cv::Scalar colors[] = {
-
{
0,
255,
255},
-
{
255,
255,
0},
-
{
0,
255,
0},
-
{
255,
0,
0}
-
};
-
const
auto NUM_COLORS =
sizeof(colors) /
sizeof(colors[
0]);
-
-
int main()
-
{
-
std::
vector<
std::
string> class_names;
-
{
-
std::ifstream class_file("yolo/coco.names");
-
if (!class_file)
-
{
-
std::
cerr <<
"failed to open classes.txt\n";
-
return
0;
-
}
-
-
std::
string line;
-
while (
std::getline(class_file, line))
-
class_names.push_back(line);
-
}
-
-
cv::VideoCapture source("yolo_test.mp4");
-
-
auto net = cv::dnn::readNetFromDarknet(
"yolo/yolov4-tiny.cfg",
"yolo/yolov4-tiny.weights");
-
net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
-
net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
-
//net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
-
//net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
-
auto output_names = net.getUnconnectedOutLayersNames();
-
-
cv::Mat frame, blob;
-
std::
vector
detections;
-
while (cv::waitKey(
1) <
1)
-
{
-
source >> frame;
-
if (frame.empty())
-
{
-
cv::waitKey();
-
break;
-
}
-
-
auto total_start =
std::chrono::steady_clock::now();
-
cv::dnn::blobFromImage(frame, blob,
0.00392, cv::Size(
416,
416), cv::Scalar(),
true,
false, CV_32F);
-
net.setInput(blob);
-
-
auto dnn_start =
std::chrono::steady_clock::now();
-
net.forward(detections, output_names);
-
auto dnn_end =
std::chrono::steady_clock::now();
-
-
std::
vector<
int> indices[NUM_CLASSES];
-
std::
vector
boxes[NUM_CLASSES];
-
std::
vector<
float> scores[NUM_CLASSES];
-
-
for (
auto& output : detections)
-
{
-
const
auto num_boxes = output.rows;
-
for (
int i =
0; i < num_boxes; i++)
-
{
-
auto x = output.at<
float>(i,
0) * frame.cols;
-
auto y = output.at<
float>(i,
1) * frame.rows;
-
auto width = output.at<
float>(i,
2) * frame.cols;
-
auto height = output.at<
float>(i,
3) * frame.rows;
-
cv::Rect rect(x - width / 2, y - height / 2, width, height);
-
-
for (
int c =
0; c < NUM_CLASSES; c++)
-
{
-
auto confidence = *output.ptr<
float>(i,
5 + c);
-
if (confidence >= CONFIDENCE_THRESHOLD)
-
{
-
boxes[c].push_back(rect);
-
scores[c].push_back(confidence);
-
}
-
}
-
}
-
}
-
-
for (
int c =
0; c < NUM_CLASSES; c++)
-
cv::dnn::NMSBoxes(boxes[c], scores[c],
0.0, NMS_THRESHOLD, indices[c]);
-
-
for (
int c =
0; c < NUM_CLASSES; c++)
-
{
-
for (
size_t i =
0; i < indices[c].size(); ++i)
-
{
-
const
auto color = colors[c % NUM_COLORS];
-
-
auto idx = indices[c][i];
-
const
auto& rect = boxes[c][idx];
-
cv::rectangle(frame, cv::Point(rect.x, rect.y), cv::Point(rect.x + rect.width, rect.y + rect.height), color,
3);
-
-
std::
ostringstream label_ss;
-
label_ss << class_names[c] <<
": " <<
std::fixed <<
std::setprecision(
2) << scores[c][idx];
-
auto label = label_ss.str();
-
-
int baseline;
-
auto label_bg_sz = cv::getTextSize(label.c_str(), cv::FONT_HERSHEY_COMPLEX_SMALL,
1,
1, &baseline);
-
cv::rectangle(frame, cv::Point(rect.x, rect.y - label_bg_sz.height - baseline -
10), cv::Point(rect.x + label_bg_sz.width, rect.y), color, cv::FILLED);
-
cv::putText(frame, label.c_str(), cv::Point(rect.x, rect.y - baseline -
5), cv::FONT_HERSHEY_COMPLEX_SMALL,
1, cv::Scalar(
0,
0,
0));
-
}
-
}
-
-
auto total_end =
std::chrono::steady_clock::now();
-
-
float inference_fps =
1000.0 /
std::chrono::duration_cast<
std::chrono::milliseconds>(dnn_end - dnn_start).count();
-
float total_fps =
1000.0 /
std::chrono::duration_cast<
std::chrono::milliseconds>(total_end - total_start).count();
-
std::
ostringstream stats_ss;
-
stats_ss <<
std::fixed <<
std::setprecision(
2);
-
stats_ss <<
"Inference FPS: " << inference_fps <<
", Total FPS: " << total_fps;
-
auto stats = stats_ss.str();
-
-
int baseline;
-
auto stats_bg_sz = cv::getTextSize(stats.c_str(), cv::FONT_HERSHEY_COMPLEX_SMALL,
1,
1, &baseline);
-
cv::rectangle(frame, cv::Point(
0,
0), cv::Point(stats_bg_sz.width, stats_bg_sz.height +
10), cv::Scalar(
0,
0,
0), cv::FILLED);
-
cv::putText(frame, stats.c_str(), cv::Point(
0, stats_bg_sz.height +
5), cv::FONT_HERSHEY_COMPLEX_SMALL,
1, cv::Scalar(
255,
255,
255));
-
-
cv::namedWindow(
"output");
-
cv::imshow(
"output", frame);
-
}
-
-
return
0;
-
}
结果图:

代码我已经上传到百度云了
链接:https://pan.baidu.com/s/1bAPlwkLAYdww7KqKoqZvnQ
提取码:cexy
里面包含了c++和python调用的cuda dnn的案例代码,下载的cache缓存和opencv450的cuda10.1版本编译好的opencv库
参考:
- https://gist.github.com/YashasSamaga/e2b19a6807a13046e399f4bc3cca3a49
- https://blog.csdn.net/length85/article/details/103767475
- https://my.oschina.net/u/4342169/blog/4479397
- https://docs.opencv.org/master/d5/de5/tutorial_py_setup_in_windows.html
- https://www.osgeo.cn/opencv-python/ch01-setup/sec02-setup-in-windows.html
- https://blog.csdn.net/weixin_41991128/article/details/83656543
- https://blog.csdn.net/qq_38629044/article/details/85936014
- https://blog.csdn.net/weixin_41991128/article/details/84593477