Quasi-Newton拟牛顿法(共轭方向法)
Quasi-Newton拟牛顿法(共轭方向法)
- 1. Introduction
- 2. 牛顿法
-
- 2.1 不能保证收敛
- 2.2 Hessian计算复杂
- 3. 共轭方向法
-
- 3.1 共轭方向
- 3.2 共轭方向上可以收敛到极小
- 3.3 共轭梯度法得到的是Q上的共轭方向
- 3.4 算法效果
- 4. 拟牛顿法
-
- 4.1 拟牛顿法构造的是Q的共轭方向
- 4.2 确定Hk - 秩1修正公式
- 4.2 确定Hk - DFP
- 4.3 确定Hk - BFGS
- 4.4 BFGS ceres
1. Introduction
拟牛顿法可以理解为使用迭代的方法近似Hessian矩阵,但是拟牛顿法本质上其实是共轭方向法,所以用共轭方向法来理解拟牛顿法更加贴切。
本文的主要内容来自于《最优化导论》(《An introduction to optimization》)
2. 牛顿法
牛顿法在很多地方都有详细的说明,就不在这里赘述了。
2.1 不能保证收敛
一般的非线性函数,牛顿法不能保证从任意起始点都可以收敛到极小值点。结果可能会随着迭代在极小值附件震荡,甚至越走越远。这就要求我们设置合理的步长。
2.2 Hessian计算复杂
另外牛顿法中Hessian矩阵计算十分复杂,于是就引入了拟牛顿法,可以设计近似矩阵来代替复杂的Hessian矩阵。
3. 共轭方向法
共轭方向法的求解的主要是n维的二次型函数:

通过找到关于Q的一系列共轭方向d,然后分别从每个共轭方向上优化,最终可以在n步之内得到结果。
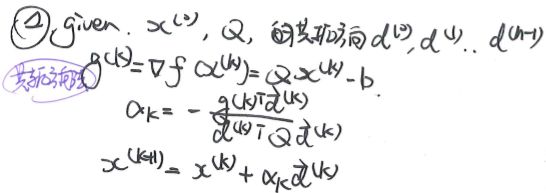
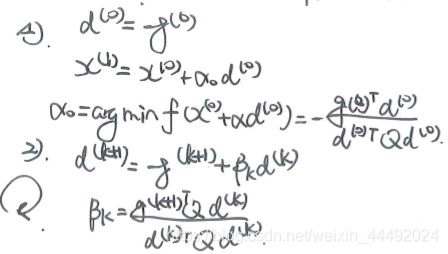
同时为了更方便的找到共轭方向,引入使用迭代求出共轭方向的方法,如下的共轭梯度法:
为了说明清楚,我们需要:
- 定义共轭方向
- 通过朝共轭方向更新x,可以收敛到极小值
- 共轭梯度法构造得到的是共轭方向
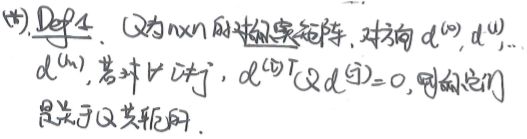
3.1 共轭方向
共轭方向的定义如下,Q是上面所述的二次型函数中的表达。
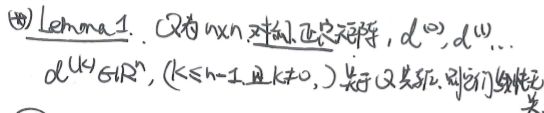
关于共轭方向还有一个重要引理:
3.2 共轭方向上可以收敛到极小

3.3 共轭梯度法得到的是Q上的共轭方向
这个可以通过数学归纳法证明,证明可以参见原书。我们只需要知道共轭梯度法得到的d确实是Q的共轭方向。

3.4 算法效果
- 共轭方向法的效率在最速下降法和牛顿法之间。
- 对n维的二次型问题,n步之内可以得到结果。
- 不需要计算Hessian矩阵。
- 也不需要存储n*n的矩阵,不需要求逆运算。
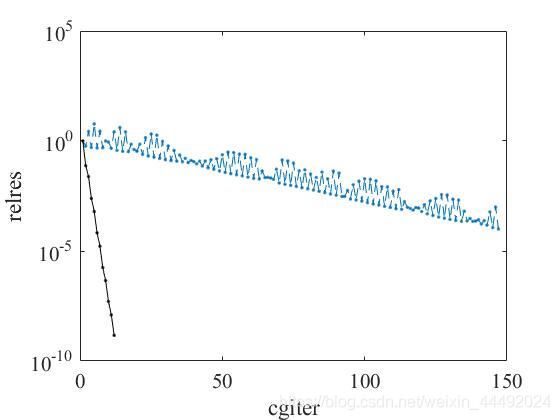
Matlab compare example
%block preconditioning solution
clear all;
ex_blockprecond;
A_full = full(A);
fprintf('\nStarting dense direct solve ...\n');
time_start = cputime;
x_star_dense = A_full\b;
time_end = cputime;
relres_dense = norm(A*x_star_dense - b)/norm(b);
fprintf('Relative residual: %e\n', relres_dense);
fprintf('Dense direct solve done.\nTime taken: %e\n',...
time_end - time_start);
fprintf('\nStarting sparse direct solve ...\n');
time_start = cputime;
x_star_sparse = A\b;
time_end = cputime;
relres_sparse = norm(A*x_star_dense - b)/norm(b);
fprintf('Relative residual: %e\n', relres_sparse)
fprintf('Sparse direct solve done.\nTime taken: %e\n\n',...
time_end - time_start);
fprintf('\nStarting CG ...\n');
time_start = cputime;
[x,flag,relres,iter,resvec] = pcg(A,b,1e-4,200);
time_end = cputime;
fprintf('CG done. Status: %d\nTime taken: %e\n', flag,...
time_end - time_start);
figure; semilogy(resvec/norm(b), '.--'); hold on;
set(gca,'FontSize', 16, 'FontName', 'Times');
xlabel('cgiter'); ylabel('relres');
time_start = cputime;
L = chol(A_blk)';
time_end = cputime;
tchol = time_end - time_start;
fprintf('\nCholesky factorization of A blk. Time taken: %e\n', tchol);
fprintf('\nStarting CG with block preconditioning ...\n');
time_start = cputime;
[x,flag,relres,iter,resvec] = pcg(A,b,1e-8,200,L,L');
time_end = cputime;
fprintf('PCG done. Status: %d\nTime taken: %e\n', flag,...
time_end - time_start);
semilogy(resvec/norm(b), 'k.-'); hold on;
print('-depsc', 'ex_blockprecond_relres.eps');
fprintf('Total time block preconditioned PCG: %e\n',...
tchol+time_end - time_start);

4. 拟牛顿法
逆牛顿法的主要步骤如下,它实质上是一致共轭方向法。可以发现,它其实是构造了一系列共轭方向,然后用共轭方向法更新变量x。

4.1 拟牛顿法构造的是Q的共轭方向
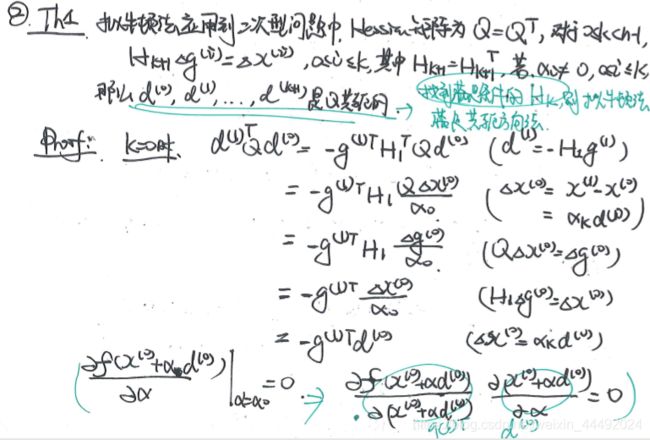

- 拟牛顿法是共轭方向法,可以在n此迭代内得到结果。
- 拟牛顿法是通过H迭代构造共轭方向,H的构造则有很多方法,下面介绍几个常用的。
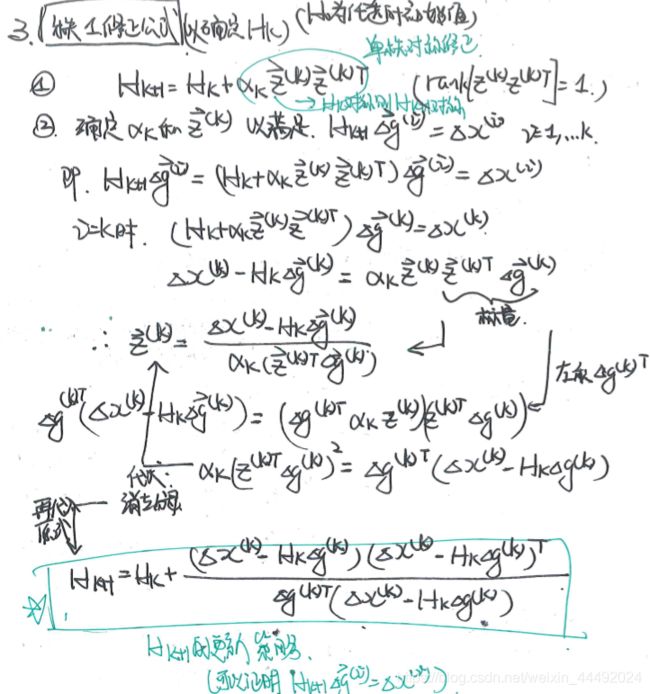
4.2 确定Hk - 秩1修正公式
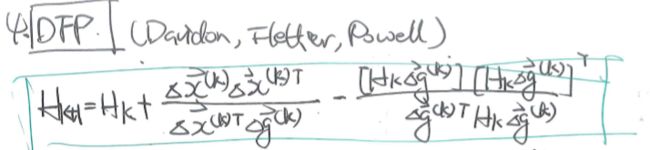
4.2 确定Hk - DFP


4.3 确定Hk - BFGS
由于我们在运算中使用的都是H的逆,于是BFGS只关注H的逆(记为B)。

4.4 BFGS ceres
BFGS ceres 代码可以在这里找到ceres中实现BFGS的代码步骤。
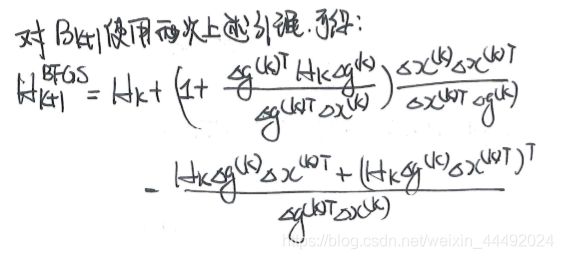
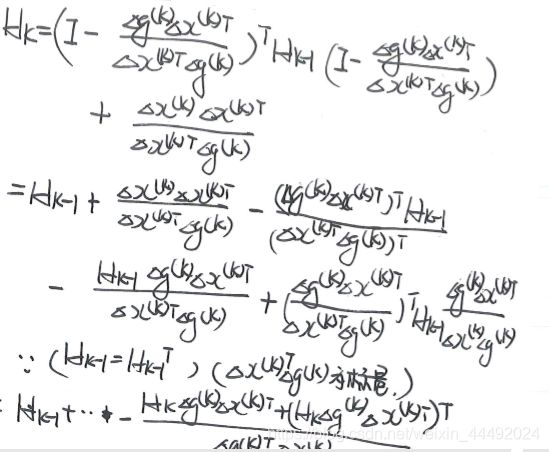
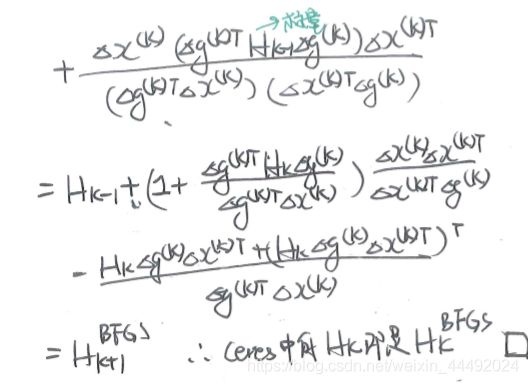
为了理解代码,我们先写出BFGS的另一种表达方式,并且证明它与上面的表达式是等价的。
// Efficient O(num_parameters^2) BFGS update [2].
//
// Starting from dense BFGS update detailed in Nocedal [2] p140/177 and
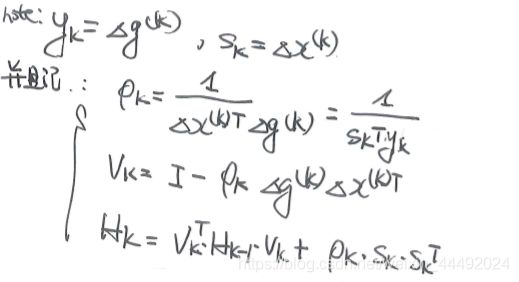
// using: y_k = delta_gradient, s_k = delta_x:
//
// \rho_k = 1.0 / (s_k' * y_k)
// V_k = I - \rho_k * y_k * s_k'
// H_k = (V_k' * H_{k-1} * V_k) + (\rho_k * s_k * s_k')
//
// This update involves matrix, matrix products which naively O(N^3),
// however we can exploit our knowledge that H_k is positive definite
// and thus by defn. symmetric to reduce the cost of the update:
//
// Expanding the update above yields:
//
// H_k = H_{k-1} +
// \rho_k * ( (1.0 + \rho_k * y_k' * H_k * y_k) * s_k * s_k' -
// (s_k * y_k' * H_k + H_k * y_k * s_k') )
//
// Using: A = (s_k * y_k' * H_k), and the knowledge that H_k = H_k', the
// last term simplifies to (A + A'). Note that although A is not symmetric
// (A + A') is symmetric. For ease of construction we also define
// B = (1 + \rho_k * y_k' * H_k * y_k) * s_k * s_k', which is by defn
// symmetric due to construction from: s_k * s_k'.
//
// Now we can write the BFGS update as:
//
// H_k = H_{k-1} + \rho_k * (B - (A + A'))
// For efficiency, as H_k is by defn. symmetric, we will only maintain the
// *lower* triangle of H_k (and all intermediary terms).
如上面的ceres的描述中描述的,对BFGS中的参数做了进一步标记:
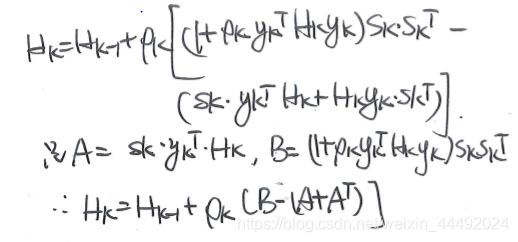
然后可以自然的得到下面的代码:
const double rho_k = 1.0 / delta_x_dot_delta_gradient;
// Calculate: A = s_k * y_k' * H_k
Matrix A = delta_x * (delta_gradient.transpose() *
inverse_hessian_.selfadjointView());
// Calculate scalar: (1 + \rho_k * y_k' * H_k * y_k)
const double delta_x_times_delta_x_transpose_scale_factor =
(1.0 + (rho_k * delta_gradient.transpose() *
inverse_hessian_.selfadjointView() *
delta_gradient));
// Calculate: B = (1 + \rho_k * y_k' * H_k * y_k) * s_k * s_k'
Matrix B = Matrix::Zero(num_parameters_, num_parameters_);
B.selfadjointView().
rankUpdate(delta_x, delta_x_times_delta_x_transpose_scale_factor);
// Finally, update inverse Hessian approximation according to:
// H_k = H_{k-1} + \rho_k * (B - (A + A')). Note that (A + A') is
// symmetric, even though A is not.
inverse_hessian_.triangularView() +=
rho_k * (B - A - A.transpose());
}
*search_direction =
inverse_hessian_.selfadjointView() *
(-1.0 * current.gradient);