HC-05蓝牙模块遇到的问题与解决方法及实现和手机通信
文章目录
-
- 1、蓝牙模块的调试——解决无法与设置AT命令的问题
-
- 1)问题1:没有搜索到串口
-
-
- 方法1:网上下载驱动
- 方法2:自己更新驱动
-
- 2)问题2:串口打开失败--PL2303HXA自2012已停产,请联系供货商
-
-
- 解决方法
- 串口测试
-
- 3)蓝牙模块的调试
- 4)AT命令
- 2、手机与蓝牙模块之间的传输——解决无法连接的问题
-
- 1)设想1:手机的问题
- 2)设想2:蓝牙模块的配置问题
- 3)设想3:接线的问题
- 4)设想4:串口调试助手的问题
- 3、手机蓝牙控制STM8单片机
-
- 参考代码
- 可能会出现的问题
1、蓝牙模块的调试——解决无法与设置AT命令的问题
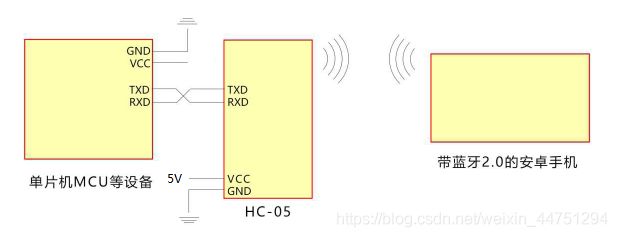
USB转TTL模块与HC-05蓝牙模块的接线:
两模块共地,两模块共VCC(VCC取5V);蓝牙模块的RX接转换模块的TX,蓝牙模块的TX接转换模块的RX。如下图所示:

这个时候就要将转换模块连接到电脑上,然后利用串口调试助手进行蓝牙模块的调试。
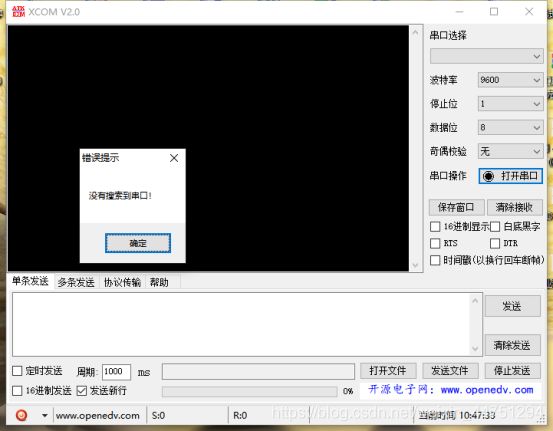
1)问题1:没有搜索到串口
首先我们需要尝试设置一下AT指令,但是连接串口的时候,你可能会遇到一下的问题:没有搜索到串口,但在确保正确连线的情况下,已经正确的上电,但是没有搜索的串口的原因,可能是没有安装驱动
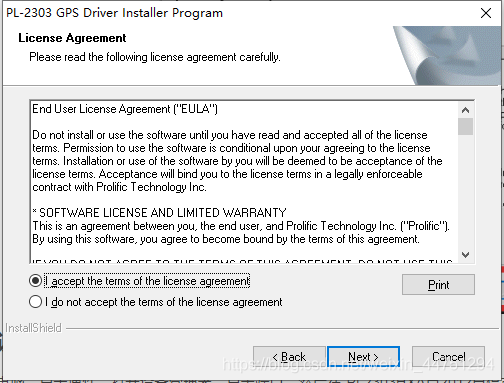
方法1:网上下载驱动
在网上找了一个驱动,然后进行安装再次尝试


方法2:自己更新驱动

驱动安装完成后需要重启
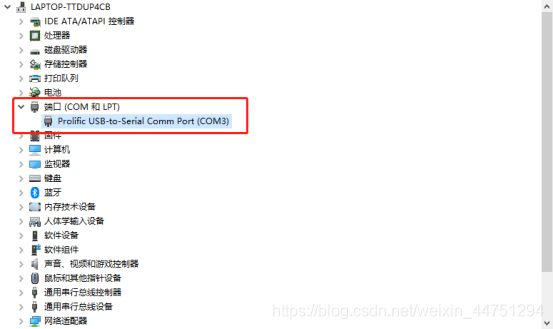
- 对比
安装驱动之前

安装驱动之后

2)问题2:串口打开失败–PL2303HXA自2012已停产,请联系供货商
成功安装了驱动之后又出现了一个问题,可以看到串口是可以被识别出来的,但打开失败,无法正常的使用

还是失败了,现在要解决停产的这个问题—“PL2303HXA自2012已停产,请联系供货商”
解决方法
参考链接
解决方法如下:
链接:https://pan.baidu.com/s/1jw1nsLGd23CagQ_dbkqu0w
提取码:vc0c
在这里下载驱动并解压
然后安装驱动


然后右键点击更新驱动程序




然后点击下一步

完成
串口测试
打开串口进行测试一下

可以正常的配对,接下来,继续进行蓝牙模块的调试

3)蓝牙模块的调试
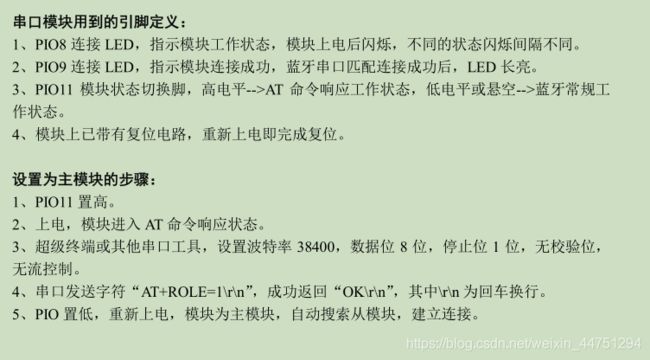
HC-05蓝牙串口通讯模块具有两种工作模式:命令响应工作模式和自动连接工作模式。在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。
- 当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;
- 当模块处于命令响应工作模式时能执行AT命令,用户可向模块发送各种AT 指令,为模块设定控制参数或发布控制命令。
怎么进入命令响应工作模式?
进入命令响应工作模式有两种方法:
- 模块上电,未配对情况下就是AT模式,波特率为模块本身的波特率,默认:9600,发送一次AT指令时需要置高一次PIO11;
- PIO11 置高电平后,再给模块上电,此时模块进入AT 模式,波特率固定为:38400,可以直接发送AT指令。
什么叫做置高一次PIO11?
在蓝牙模块中有一个小按键,按一下就置高一次PIO11。也就是说,第一种方法需要每发送一次AT指令按一次;而第二种方式是长按的过程中上电,之后就无需再管了,直接发送AT命令即可。
需要注意一下,两种进入命令响应工作模式的方式使用的波特率是不一样的,建议使用第二种方式。
怎么区分进了命令响应工作模式呢?
在蓝牙模块上有灯,当灯快闪的时候,就是自动连接工作模式;当灯慢闪的时候,就是命令响应工作模式,当灯慢闪两下的时候就是与手机正常连接模式。
4)AT命令
进入到命令响应工作模式之后,就可以使用串口调试助手进行蓝牙调试了。
首先有一点,AT指令不区分大小写,均以回车、换行结尾。下面介绍常用的AT指令:

对于AT指令,有几点注意:
- AT+NAME?:获得设备名称,这个AT指令有很大可能性是没有返回的,因为我也看到了很多的例子……,但是其他的指令都是没有问题的,直接设置设备名称就行了;
- AT+UART?:获得串口参数,串口的参数一共有三个,波特率、停止位、检验位。其取值如下:

其默认值为:9600,0,0。
设置蓝牙参数

查看设置结果,设置成功

具体的AT指令集科研查看数据手册,需要的可以私信或者评论一下
2、手机与蓝牙模块之间的传输——解决无法连接的问题
直接将蓝牙模块与转换模块连接,再讲其连接到电脑上,蓝牙模块直接进入自动连接工作模式。
此时手机打开蓝牙串口调试应用,用其来连接蓝牙模块。
正常的情况下,先在手机进行配对,然后在蓝牙串口调试应用直接输入字符串,电脑的串口上就可以成功的接受到了。
但是我在测试的时候,可以这次配对上,但是没法正常连接

1)设想1:手机的问题
蓝牙可以配对,但无法连接
尝试了一下用手机和电脑和其他手机连接,发现均不可以
而使用另外一台的华为手机则可以成功的实现与电脑进行配对。(小米手机配对失败,而华为手机配对成功)

可见是我小米手机的蓝牙配对问题。
随后我就用了华为的那台手机进行测试,竟然发现华为的手机也无法与蓝牙模块进行配对,得出了一个结论,那就是和手机无关,应该是蓝牙模块需要一些其他设置被搜寻到。
2)设想2:蓝牙模块的配置问题
查资料,发现,蓝牙模块需要被设置为从机才可以被查找,随后进行了一番尝试,首先去查AT指令集(正点原子有提供)

编写AT指令进行设置,ok表明设置成功。

查询,确实设置为从模式

但是结果还是失败了。

这就表明,我设置的蓝牙模式是没有错误的1,应该是其他的问题
3)设想3:接线的问题
对于这个问题,我觉得是不可能的,因为我可以正常的配置AT指令
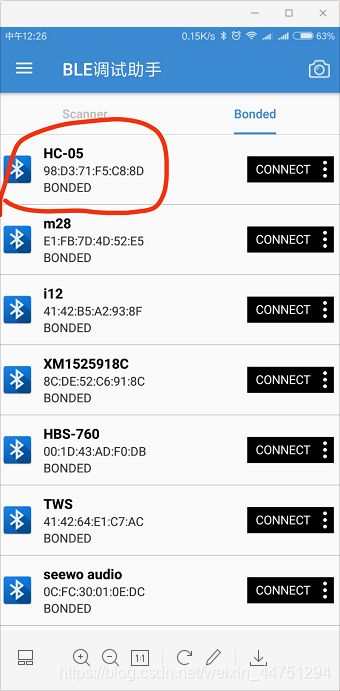
4)设想4:串口调试助手的问题
不断的更换蓝牙调试助手,名字就叫 蓝牙串口,然后就可以成功连接上了

可以实现手机与串口段的信息发送

最后,成功解决,问题就出在串口调试助手上,得出的结论的就是,如果可以正常的配对,但无法正常连接的话,那就换你的手机或者是串口调试助手,因为蓝牙的兼容问题使得配对比较麻烦。
如果需要手机的串口调试助手的apk可以私信或者评论一下
3、手机蓝牙控制STM8单片机
之前的两个例子都是相比较而言比较简单的,这个例子将会涉及到程序的内容了。
实现功能:手机通过蓝牙,向STM8单片机发送消息,STM8接收到消息之后原封不动的返回给手机。当然如果掌握了这个例子,也可以修改成,手机发送特定的消息,然后,STM8单片机做出相对应的动作。比如:点亮LED等、发动电机等等。
原理就是:手机通过蓝牙传输到HC-05上,再通过串口通信和STM8通信;而之前一般都是电脑上通过USB线转串口的方式,通过串口和STM8通信。本质上没有区别的。
这个时候就应该更加深刻地体会到了本文开篇的一句话:说白了,只是个蓝牙转串口的设备,你只要知道串口怎么编程使用,就可以了,实现了所谓的透明传输。蓝牙的相关一切都被封装起来了,都不需要接触到。
知道了只是简单的串口通信,那么代码就很容易实现了
手机app的控制界面设计如下:

参考代码
/****************************************************************/
//接收单字符函数UART1_ReceiveByte(),无形参data,有返回值,返回接收到的数据
//采用查询的方法实现
/****************************************************************/
u8 UART1_ReceiveByte(void)
{
// printf("进入UART1_ReceiveByte函数...\r\n");
u8 UART1_RX_BUF; //定义接收数据暂存变量
while (!(UART1_SR & 0x20)); //等待接收标志
UART1_SR&=0xDF; //清零接收标志位RXNE
UART1_RX_BUF=UART1_DR; //取回接收到的数据
// printf("取回接收到的数据\r\n");
return UART1_RX_BUF; //返回暂存变量中的数据给调用者
}
/****************************************************************/
//初始化函数UART1_Init(),无形参和返回值
/****************************************************************/
void UART1_Init(void)
{
//1.设定通信数据位数,此处设定为8位数据位,无校验位
UART1_CR1 = 0x00;
//**************************************************
//展开UART1_CR1赋值二进制数值为:0000 0000
//含义:R8=0; 接收数据位不存在第9位
// T8=0; 发送数据位不存在第9位
// UARTD=0; 使能UART功能
// M=0; 一个起始位,8个数据位,n个停止位
// n取决于UART1_CR3中的STOP[1:0]位
// WAKE=0; UART被空闲总线唤醒
// PCEN=0: (UART模式)奇偶校验控制被禁止
// PS=0; 偶校验(校验功能未启用)
// PIEN=0; 校验中断被禁止
//*************************************************
//2.设定通信停止位位数,此处设定为1位停止位
UART1_CR3 = 0x00;
//**************************************************
//展开UART1_CR3赋值二进制数值为:0000 0000
//含义:保留位=0;必须保持清零
// LINEN=0;LIN模式被禁止
// STOP=00;配置为“00”,1个停止位
// CLKEN、CPOL、CPHA、LBCL这几位在UART3上不存在
//*************************************************
//3.配置通信波特率参数,此处配置为9600bps(16MHz频率下)
UART1_BRR2 = 0x03;
UART1_BRR1 = 0x68;
//4.使能发送和接收功能
// UART1_CR2 = 0x0C;
UART1_CR2 = 0x2C;
//**************************************************
//展开UART1_CR2赋值二进制数值为:0010 1100
//含义:TIEN=0;发送中断被禁止
// TCIEN=0;发送中断完成被禁止
// RIEN=1;接收中断开启
// ILIEN=0;IDLE中断被禁止
// TEN=1;发送功能使能
// REN=1;接收功能使能
// RWU=0;(UART模式)正常工作模式
// PIEN=0;未发送断开字符
//*************************************************
}
/****************************************************************/
//发送字符重定向函数putchar(),有形参ch,有返回值
/****************************************************************/
int putchar(int ch)
{
UART3_SendByte((u8)ch);
// UART1_SendByte((u8)ch);//将Printf内容发往串口
return (ch);
}
//接收中断服务函数
//**************************中断函数区域**************************
#pragma vector = UART1_R_RXNE_vector //0x14
__interrupt void UART1_RX_IRQHandler(void)
{
if(UART1_SR&0x20){ //若UART1确实接收到了数据
UART1_SR&=0xDF; //清零接收标志位RXNE
}
cmd=UART1_DR; //取回串口数据
// printf("进入中断服务函数...\r\n");
// cmd = UART1_ReceiveString(1);
switch(cmd) //判断串口接收命令值
{
case 'a':
Motor_TurnLeft(); //左转
break;
case 'd':
Motor_TurnRight(); //右转
break;
case 'w':
Motor_GoForward(); //直走
break;
case 's':
Motor_GetBack(); //后退
break;
case 'p':
Motor_BeParking(); //停车
break;
case 'n': //功能二:实现跟随模式
//printf("模式二:实现跟随模式 \r\n");
LED1 = 1; //熄灯
Motor_BeParking();
InfraredFollow_Module();
break;
case 'b': //功能三:实现避障模式
//printf("模式三:实现避障模式 \r\n");
LED1 = 1; //熄灯
Motor_BeParking();
InfraredAvoidance_Module();
break
default:
printf("【ERROR】,没有此功能\r\n");
break;
}
}
关于中断向量号的查询可以查看这里:IAR中断向量表与中断服务函数的编写
可能会出现的问题
在通过手机设置一些按键,在电脑的串口调试助手上可能会看到中断函数会调用两次,重复的执行

但是我又换了一个串口调试助手就又没有问题了…真是头疼

参考链接:【常用模块】HC-05蓝牙串口通信模块使用详解(实例:手机蓝牙控制STM32单片机)