【逆运动学】六轴机器人运动学逆解上位机控制
六轴机器人逆运动学上位机控制
文章目录
- 六轴机器人逆运动学上位机控制
-
- 最终效果
- 准备
- 软件编写
-
- 编写流程
- 软件界面部分代码
- 串口通信协议
-
- 示例:
- 为什么要分成高八位和低八位:
- 串口数据格式代码
- 串口连接代码
- 运动学逆解
-
- 计算步骤
- 逆解代码
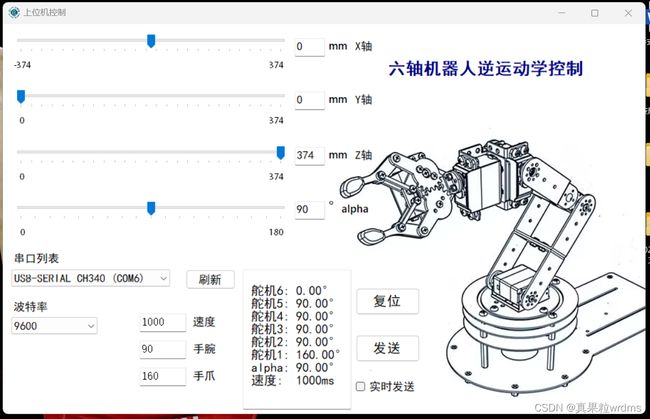
最终效果
通过开发的上位机软件,实现对机械臂末端的精准操控。该软件接收输入的坐标与角度参数,经过算法处理计算出机械臂各关节轴的目标角度。随后,这些角度值被转换为对应的脉冲宽度调制(PWM)信号数值并传输至下位机,进而驱动舵机偏转至指定位置。
Robot_Arm
准备
机器人下位机已经写好信号接收和舵机控制的程序;
电脑上安装好Visual Studio 和 CH341串口驱动;
软件编写
编写流程
- 打开 Visual Studio 。
- 在起始页中,选择“创建新项目”。
- 在“创建新项目”窗口中,选择“Windows 桌面”类别。
- 在右侧的模板列表中,选择“Windows 窗体应用(.NET Framework)”或“控制台应用程序”等您想要创建的应用程序类型。
- 为项目指定一个名称和存储位置,然后点击“确定”。
- 根据选择的应用程序类型,Visual Studio 会创建基本的项目结构和代码框架。
- 然后就可以在相应的代码文件(例如 Form1.cs 或 Program.cs)中编写 C# 代码来实现应用程序逻辑。
软件界面部分代码
private void UpdateSendDataTextBox()
{
double x_input = trackBar1.Value - x_origin;
double y_input = trackBar2.Value;
double z_input = trackBar3.Value;
alpha = trackBar4.Value;
label_Xmin.Text = $"-{x_origin}";
label_Xmax.Text = $"{x_origin}";
label_Ymax.Text = $"{z_origin}";
label_Zmax.Text = $"{z_origin}";
textBox_alpha.Text = trackBar4.Value.ToString();
textBox_Z.Text = trackBar3.Value.ToString();
textBox_Y.Text = trackBar2.Value.ToString();
textBox_X.Text = (trackBar1.Value - x_origin).ToString();
textBox_wrist.Text = theta5.ToString();
textBox_hand.Text = theta6.ToString();
if (JiSuan(x_input, y_input,z_input, alpha))
{
textBoxSendData.Text =
$"\r\n 舵机6: {theta1:F2}°" +
$"\r\n 舵机5: {theta2:F2}°" +
$"\r\n 舵机4: {theta3:F2}°" +
$"\r\n 舵机3: {theta4:F2}°" +
$"\r\n 舵机2: {theta5:F2}°" +
$"\r\n 舵机1: {theta6:F2}°" +
$"\r\n alpha: {alpha:F2}°" +
$"\r\n 速度: {Value_speed}ms";
Solvable_flage = true;
}
else
{
textBoxSendData.Text =
$"\r\n 舵机6: 无解" +
$"\r\n 舵机5: 无解" +
$"\r\n 舵机4: 无解" +
$"\r\n 舵机3: 无解" +
$"\r\n 舵机2: {theta5:F2}°" +
$"\r\n 舵机1: {theta6:F2}°" +
$"\r\n alpha: {alpha:F2}°" +
$"\r\n 速度: {Value_speed}ms";
Solvable_flage = false;
}
}
/*复位按钮*/
private void buttonPlus1_Click(object sender, EventArgs e)
{
trackBar1.Value = x_origin;
trackBar2.Value = y_origin;
trackBar3.Value = z_origin;
trackBar4.Value = 90;
Value_speed = 1000;
theta5 = wrist_origin;
theta6 = hand_origin;
textBox_speed.Text = $"{Value_speed}";
UpdateSendDataTextBox();
SendData();
}
//=滑动条及输入框部分================================================================================================
private void textBox_wrist_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_wrist.Text, out int value))
{
//textBox_X.Text = trackBar1.Value.ToString();
if (value >= 0 && value <= 180)
{
theta5 = value;
}
else
{
MessageBox.Show($"请输入范围在 0 到 180 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
if (isRealtimeSendEnabled)
{
SendData();
}
}
private void textBox_hand_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_hand.Text, out int value))
{
//textBox_X.Text = trackBar1.Value.ToString();
if (value >= 0 && value <= 180)
{
theta6 = value;
}
else
{
MessageBox.Show($"请输入范围在 0 到 180 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
if (isRealtimeSendEnabled)
{
SendData();
}
}
private void textBox_speed_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_speed.Text, out int value))
{
//textBox_X.Text = trackBar1.Value.ToString();
if (value >= 100 && value <= 3000)
{
Value_speed = value;
}
else
{
MessageBox.Show($"请输入范围在 100 到 3000 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
}
//-----滑动条-文本框alpha-----------------------------------------------------------------
/*输入框alpha*/
private void textBox_alpha_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_alpha.Text, out int value))
{
textBox_alpha.Text = trackBar4.Value.ToString();
if (value >= trackBar4.Minimum && value <= trackBar4.Maximum)
{
trackBar4.Value = value;
}
else
{
MessageBox.Show($"请输入范围在 {trackBar4.Minimum} 到 {trackBar4.Maximum} 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
if (isRealtimeSendEnabled)
{
SendData();
}
}
private void trackBar4_ValueChanged(object sender, EventArgs e)
{
UpdateSendDataTextBox();
if (isRealtimeSendEnabled)
{
SendData();
}
}
//-------滑动条-文本框Z-----------------------------------------------------------
private void trackBar3_Scroll(object sender, EventArgs e)
{
UpdateSendDataTextBox();
if (isRealtimeSendEnabled)
{
SendData();
}
}
/*输入框Z*/
private void textBox_Z_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_Z.Text, out int value))
{
textBox_Z.Text = trackBar3.Value.ToString();
if (value >= trackBar3.Minimum && value <= trackBar3.Maximum)
{
trackBar3.Value = value;
}
else
{
MessageBox.Show($"请输入范围在 {trackBar3.Minimum} 到 {trackBar3.Maximum} 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
}
//-------------------------------------------------------------------
/*检查滑动条trackBar2*/
private void trackBar2_Scroll(object sender, EventArgs e)
{
UpdateSendDataTextBox();
if (isRealtimeSendEnabled)
{
SendData();
}
}
/*输入框Y*/
private void textBox_Y_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_Y.Text, out int value))
{
textBox_Y.Text = trackBar2.Value.ToString();
if (value >= trackBar2.Minimum && value <= trackBar2.Maximum)
{
trackBar2.Value = value;
}
else
{
MessageBox.Show($"请输入范围在 {trackBar2.Minimum} 到 {trackBar2.Maximum} 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
}
//---------------------------------------------------------------
/*检查滑动条trackBar1*/
private void trackBar1_Scroll(object sender, EventArgs e)
{
UpdateSendDataTextBox();
if (isRealtimeSendEnabled)
{
SendData();
}
}
/*输入框X*/
private void textBox_X_KeyDown(object sender, KeyEventArgs e)
{
if (e.KeyCode == Keys.Enter)
{
if (int.TryParse(textBox_X.Text, out int value))
{
textBox_X.Text = trackBar1.Value.ToString();
if (value >= trackBar1.Minimum-x_origin && value <= trackBar1.Maximum-x_origin)
{
trackBar1.Value = value+x_origin;
}
else
{
MessageBox.Show($"请输入范围在 {trackBar1.Minimum} 到 {trackBar1.Maximum} 之间的整数!");
}
}
else
{
MessageBox.Show("请输入一个有效的整数!");
}
UpdateSendDataTextBox();
}
}
串口通信协议
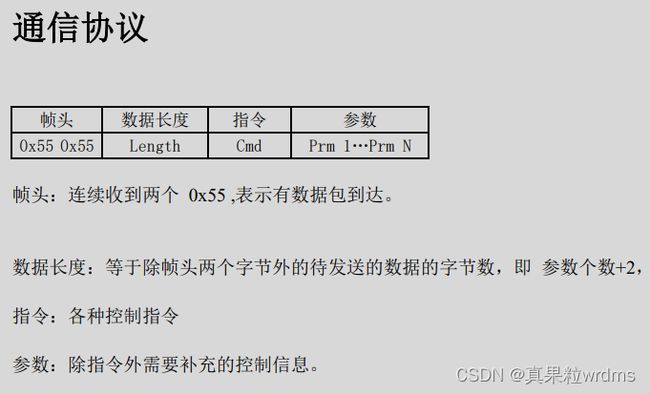
根据上面的通信协议内容,便可以基本明确串口应该如何发送数据。
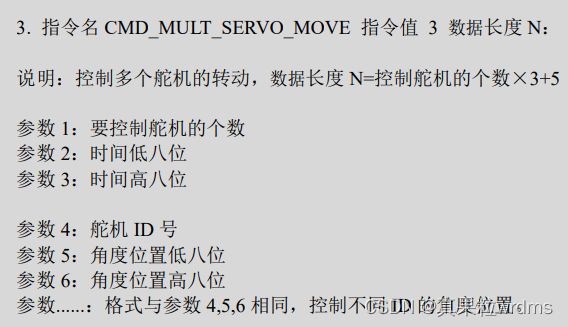
示例:
下图是控制六个舵机,每个舵机的角度值为1500 (0x5DC),移动速度为1111 (0x457)时的数据格式

为什么要分成高八位和低八位:
-
单字节传输机制:串口通信中,数据是以字节为单位进行传输的。每个字节包含8位,这是由串口的硬件结构决定的。
-
连续传输需求:当需要传输的数据超过一个字节,即大于8位时,必须将数据分割成多个字节进行连续传输。
-
缓存限制:串口的收发寄存器SBUF是八位的,这意味着一次只能处理8位数据。如果赋予SBUF超过8位的数据,它只能取低八位。
所以,当传输的数据大于八位,即大于255时,就需要将其分成高八位和低八位。
串口数据格式代码
/*转换为数据帧格式*/
private void UnifcatData()
{
// t1角度 - 6舵机
// t2角度 - 5舵机
// t3角度 - 4舵机
// t4角度 - 3舵机
// t5角度 - 2舵机
// t6角度 - 1舵机
//舵机pwm值范围为500~2500,对应角度0~180
PWMval1 = (int)(theta6 * 11.11) + 500;
PWMval2 = (int)(theta5 * 11.11) + 500;
PWMval3 = (int)(theta4 * 11.11) + 500;
PWMval4 = (int)(theta3 * 11.11) + 500;
PWMval5 = (int)(theta2 * 11.11) + 500;
PWMval6 = (int)(theta1 * 11.11) + 500;
bytesToSend[0] = 85;//0x55
bytesToSend[1] = 85;//0x55 帧头
bytesToSend[2] = 23;//0x17 长度
bytesToSend[3] = 3;//0x03 指令
bytesToSend[4] = 6;//0x06 控制舵机个数
bytesToSend[5] = (byte)Value_speed;//移动时间 Value_speed
bytesToSend[6] = (byte)(Value_speed >> 8);
bytesToSend[7] = 1;//0x01 id1
bytesToSend[8] = (byte)PWMval1;
bytesToSend[9] = (byte)(PWMval1 >> 8);
bytesToSend[10] = 2;//0x02 id2
bytesToSend[11] = (byte)PWMval2;
bytesToSend[12] = (byte)(PWMval2 >> 8);
bytesToSend[13] = 3;//0x03 id3
bytesToSend[14] = (byte)PWMval3;
bytesToSend[15] = (byte)(PWMval3 >> 8);
bytesToSend[16] = 4;//0x04 id4
bytesToSend[17] = (byte)PWMval4;
bytesToSend[18] = (byte)(PWMval4 >> 8);
bytesToSend[19] = 5;//0x05 id5
bytesToSend[20] = (byte)PWMval5;
bytesToSend[21] = (byte)(PWMval5 >> 8);
bytesToSend[22] = 6;//0x06 id6
bytesToSend[23] = (byte)PWMval6;
bytesToSend[24] = (byte)(PWMval6 >> 8);
}
串口连接代码
private void InitializeComboBox()
{
// 常用波特率
int[] baudRates = { 300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 38400, 57600, 115200 };
// 将波特率添加到ComboBox中
object[] baudRateObjects = Array.ConvertAll(baudRates, item => (object)item);
comboBoxBaudRate.Items.AddRange(baudRateObjects);
// 设置默认波特率为9600
comboBoxBaudRate.SelectedItem = 9600;
// 注册事件处理器
comboBoxBaudRate.SelectedIndexChanged += ComboBoxBaudRate_SelectedIndexChanged;
}
private void comboBoxBaudRate_SelectedIndexChanged(object sender, EventArgs e)
{
// 当ComboBox的选定值改变时,更新bot_val变量
bot_val = (int)comboBoxBaudRate.SelectedItem;
//MessageBox.Show($"波特率已更改为: {bot_val}");
}
/*波特率选项框*/
private void ComboBoxBaudRate_SelectedIndexChanged(object sender, EventArgs e)
{
throw new NotImplementedException();
}
/*串口搜索框*/
private void GetAvailablePorts()
{
comboBoxPorts.Items.Clear();
var searcher = new ManagementObjectSearcher("SELECT * FROM Win32_PnPEntity WHERE Caption LIKE '%(COM%)'");
var portNames = SerialPort.GetPortNames();
var ports = new List();
foreach (ManagementObject queryObj in searcher.Get())
{
string name = queryObj["Caption"].ToString();
foreach (string port in portNames)
{
if (name.Contains(port))
{
ports.Add(name);
break;
}
}
}
comboBoxPorts.Items.AddRange(ports.ToArray());
}
/*串口刷新按钮*/
private void buttonRefresh_Click(object sender, EventArgs e)
{
GetAvailablePorts();
}
/*串口发送按钮*/
private void buttonSend_Click(object sender, EventArgs e)
{
SendData();
}
private void Form1_Load(object sender, EventArgs e)
{
}
/*检查串口搜索框,连接串口*/
private void comboBoxPorts_SelectedIndexChanged(object sender, EventArgs e)
{
if (serialPort != null && serialPort.IsOpen)
{
serialPort.Close();
}
string selectedPortInfo = comboBoxPorts.SelectedItem.ToString();
string selectedPort = selectedPortInfo.Substring(selectedPortInfo.LastIndexOf("(COM")).Replace("(", "").Replace(")", "");
serialPort = new SerialPort(selectedPort)
{
BaudRate = bot_val, // 设置波特率
ReadTimeout = 3000, // 读取超时设置为3秒
WriteTimeout = 3000 // 写入超时设置为3秒
};
//serialPort.DataReceived += SerialPort_DataReceived;
try
{
serialPort.Open();
}
catch (UnauthorizedAccessException ex)
{
MessageBox.Show("访问串口被拒绝: " + ex.Message, "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
catch (IOException ex)
{
MessageBox.Show("串口打开失败: " + ex.Message, "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
catch (ArgumentException ex)
{
MessageBox.Show("无效的串口参数: " + ex.Message, "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
catch (InvalidOperationException ex)
{
MessageBox.Show("串口状态无效: " + ex.Message, "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
/*检查是否勾选实时发送*/
private void checkBoxRealtimeSend_CheckedChanged(object sender, EventArgs e)
{
isRealtimeSendEnabled = checkBoxRealtimeSend.Checked;
}
/*向串口发送数据*/
private void SendData()
{
if (serialPort != null && serialPort.IsOpen)
{
if (Solvable_flage)
{
try
{
UnifcatData();
serialPort.Write(bytesToSend, 0, bytesToSend.Length);
//System.Threading.Thread.Sleep(1000);// 等待数据发送完成
}
catch (Exception ex)
{
MessageBox.Show("发送数据时出错: " + ex.Message, "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
else
{
if (!isRealtimeSendEnabled)
MessageBox.Show("无解,请调整坐标 " , "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
else
{
MessageBox.Show("请选择一个串口并确保它是打开的", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
运动学逆解
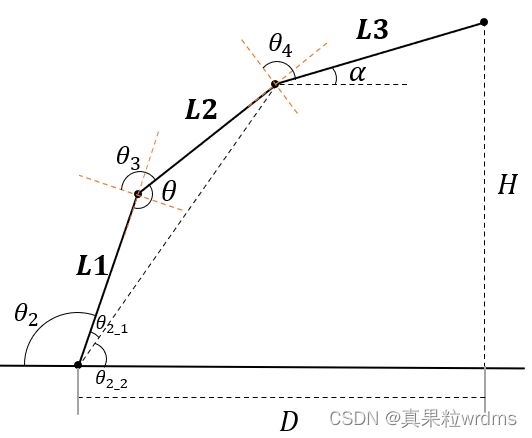
计算步骤
已知机械臂末端坐标(x,y,z)和α角,求角 θ 1 θ_1 θ1 θ 2 θ_2 θ2 θ 3 θ_3 θ3 θ 4 θ_4 θ4
首先,测量出机械臂的长度(mm):
- L 1 = 105.0 L_1 = 105.0 L1=105.0
- L 2 = 89.0 L_2 = 89.0 L2=89.0
- L 3 = 180.0 L_3 = 180.0 L3=180.0
- 计算在xy平面内的底盘舵机角度 θ 1 \theta_1 θ1 :
- θ 1 = arctan ( y x ) \theta_1 = \arctan(\frac{y}{x}) θ1=arctan(xy)
将三维立体坐标转换到二维平面内:
-
机械臂末端的高度和水平距离 :
- D = ∣ x 2 + y 2 ∣ D = \sqrt{|x^2 + y^2|} D=∣x2+y2∣, H = z H = z H=z
-
L 3 L_3 L3在 x x x 方向和 y y y 方向的分量:
- x α = L 3 × cos ( α r a d ) x_{\alpha} = L_3 \times \cos(\alpha_{rad}) xα=L3×cos(αrad) , y α = L 3 × sin ( α r a d ) y_{\alpha} = L_3 \times \sin(\alpha_{rad}) yα=L3×sin(αrad)
-
连杆 L 1 L_1 L1和 L 2 L_2 L2的 x x x 和 y y y 分量:
- x θ = D − x α x_{\theta} = D - x_{\alpha} xθ=D−xα , y θ = H − y α y_{\theta} = H - y_{\alpha} yθ=H−yα
-
连杆 L 2 L_2 L2末端到原点的距离:
- d θ = x θ 2 + y θ 2 d_{\theta} = \sqrt{x_{\theta}^2 + y_{\theta}^2} dθ=xθ2+yθ2
-
连杆 L 1 L_1 L1与 L 2 L_2 L2之间的夹角 Θ \Theta Θ:
- Θ = arccos ( L 1 2 + L 2 2 − d θ 2 2 × L 1 × L 2 ) \Theta = \arccos(\frac{L_1^2 + L_2^2 - d_{\theta}^2}{2 \times L_1 \times L_2}) Θ=arccos(2×L1×L2L12+L22−dθ2)
-
舵机 4 的角度 θ 3 \theta_3 θ3:
- θ 3 = 180 − π × 1.5 − Θ 180 \theta_3 = 180 - \frac{\pi \times 1.5 - \Theta}{180} θ3=180−180π×1.5−Θ (转换为角度)
-
角度 θ 2 1 \theta_{2_1} θ21和 θ 2 2 \theta_{2_2} θ22:
- θ 2 1 = arccos ( L 1 2 + d θ 2 − L 2 2 2 × L 1 × d θ ) \theta_{2_1} = \arccos(\frac{L_1^2 + d_{\theta}^2 - L_2^2}{2 \times L_1 \times d_{\theta}}) θ21=arccos(2×L1×dθL12+dθ2−L22) , θ 2 2 = arccos ( x θ d θ ) \theta_{2_2} = \arccos(\frac{x_{\theta}}{d_{\theta}}) θ22=arccos(dθxθ)
-
舵机 5 的角度 θ 2 \theta_2 θ2:
- θ 2 = 180 − ( θ 2 1 180 + θ 2 2 180 ) \theta_2 = 180 - (\frac{\theta_{2_1}}{180} + \frac{\theta_{2_2}}{180}) θ2=180−(180θ21+180θ22)
-
舵机 3 的角度 θ 4 \theta_4 θ4:
- θ 4 = ∣ Θ − α r a d + θ 2 1 + θ 2 2 180 − 90 ∣ \theta_4 = |\frac{\Theta - \alpha_{rad} + \theta_{2_1} + \theta_{2_2}}{180} - 90| θ4=∣180Θ−αrad+θ21+θ22−90∣
逆解代码
private const double PI = Math.PI;
private const double L1 = 105.0; // 机械臂长度
private const double L2 = 89.0; // 机械臂长度
private const double L3 = 180.0; // 机械臂长度
/*计算底盘舵机角度,并将坐标转换到二维*/
public static bool JiSuan(double x, double y, double z, double alpha)
{
//计算底盘舵机角度
theta1 = Rad2Deg(Math.Atan2(y, x));
double H = z; // 高度
double D = Math.Sqrt(Math.Abs(x * x) + y * y); // 水平距离
return (My_Model(D, H, alpha));
}
//在二维平面计算角度
public static bool My_Model(double D, double H, double alpha)
{
alpha = Deg2Rad(alpha);//转为弧度
double x_alpha = L3 * Math.Cos(alpha);
double y_alpha = L3 * Math.Sin(alpha);
double x_theta = D - x_alpha;
double y_theta = H - y_alpha;
double d_theta = Math.Sqrt(x_theta* x_theta+ y_theta* y_theta);
double Theta = Math.Acos((L1*L1+L2*L2-d_theta*d_theta)/(L1*L2*2));
theta3 = Rad2Deg(PI*1.5 - Theta); // 舵机4
double theta2_1 = Math.Acos((L1*L1+d_theta*d_theta-L2*L2)/(L1*d_theta*2));
double theta2_2 = Math.Acos(x_theta/d_theta);
theta2 =180 - Rad2Deg(theta2_1+theta2_2); // 舵机5
theta4 = Math.Abs(Rad2Deg(Theta- alpha + theta2_1 + theta2_2) - 90);// 舵机3
return IsSolutionValid(theta1, theta2, theta3, theta4);
}
/*检查解是否在有效范围内*/
static bool IsSolutionValid(double theta1, double theta2, double theta3, double theta4)
{
return (theta1 >= 0 && theta1 <= 180 &&
theta2 >= 0 && theta2 <= 180 &&
theta3 >= 0 && theta3 <= 180 &&
theta4 >= 0 && theta4 <= 180);
}
/*弧度转换为度*/
static double Rad2Deg(double rad)
{
return rad * 180 / Math.PI;
}
/*角度转换为弧度*/
static double Deg2Rad(double rad)
{
return rad * Math.PI / 180;
}
上位机与下位机工程文件:
分享文件:机器人逆运动学
链接:https://pan.xunlei.com/s/VO27X797hfDGBdhMXMYYwmqqA1?pwd=hqes#
复制这段内容后打开手机迅雷App,查看更方便