相机标定系列(二)单应矩阵
相机标定系列(二)单应矩阵
文章目录
- 相机标定系列(二)单应矩阵
- 前言
- 一、VSLAM中单应矩阵的推导
- 二、单应矩阵的求解
- 三、张正友标定中的单应性矩阵
- 四、根据单应矩阵求解相机内参
前言
单应矩阵(Homography)H 它描述了两个平面之间的映射关系。具体的讲,就是处于共同平面上的一些点,在两张图像之间的变换关系。举个例子:空间中有一个长方形盒子,长方形盒子正面中心点为O,用相机在不同的角度拍了两张图片,得到picture1和picture2,且两张图片中都有O点,O点在两张图片中的像素坐标分别为X1(u1,v1),X2(u2,v2),你可以简单的认为,这两个坐标之间的关系就是单应性变换,即:X1=HX2(或X2=HX1)
换成齐次坐标,就是:
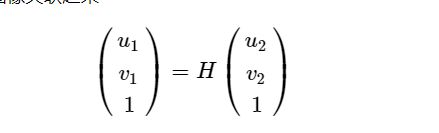
推广到更多点:空间中任意一点,只要都体现在这两张图片上,都满足上面的关系。这里你应该能大致明白单应性矩阵H了。下面我将进行单应矩阵的详细推导
一、VSLAM中单应矩阵的推导
上一篇我们知道了相机模型,我们知道

我们知道上面等式右边前两项为相机内参矩阵,我们设为K,则

因为旋转矩阵R是3X3,平移矩阵t为3X1,(为了推导方便)把变换矩阵拆成旋转矩阵和平移矩阵:
设三维空间中的一点P,

相机最初静止阶段拍了一张图片picture1,这个时候相机的运动无旋转,无平移,R为单位矩阵,t为0,图片中包含P点,则P点在picture1中的像素坐标p1(u1,v1,1)满足:
则: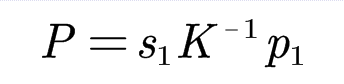
上面这个公式后面会用到
然后相机进行了运动,用旋转矩阵R和平移矩阵描述运动,相机运动后拍了一张图片为picture2,图片包含空间点P,则P点在picture中的像素坐标p2(u2,v2,1)满足:

已知p1和p2都来自P,空间P点一定在空间中的一个平面上,空间平面的定义是:

化为矩阵相乘的形式:

其中
整理可得:
看一下前面p1和p2计算公式,进行下面推导:

则
因此可以得到:
由于齐次坐标p1,p2的尺度不变性,则s1,s2为尺度因子,单应矩阵H为:

二、单应矩阵的求解
从上面可以看出来单应矩阵与旋转、平移以及平面的参数有关。在齐次坐标下,单应矩阵 H 也是一个 3 × 3 的矩阵,求解时的思路根据匹配点计算 H,然后将它分解可以计算出相机外参旋转矩阵R和平移矩阵t;
把H展开可得:
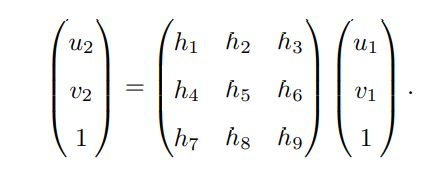
那么在齐次坐标下,H的自由度是多少,H是3x3的,有9个参数,自由度就是9吗?不是9,答案是8,原因如下:
在齐次坐标系的尺度不变性下:

这里m为非零因子,因此可以得到H可以进行任意的缩放而值保持不变,因此H的自由度为8。在求解过程中,通常乘以一个非零因子使得 h9 = 1(在它取非零值时)。然后根据第三行,去掉这个非零因子,这样在矩阵相乘时有:

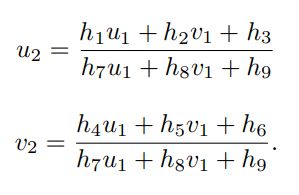
整理得: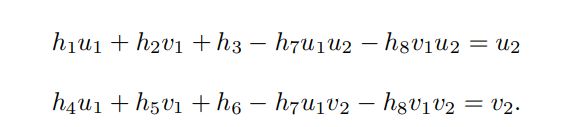
这样一组匹配点对p1和p2就可以构造出两项约束,于是自由度为 8 的单应矩阵可以通过 4 对匹配点算出,即求解以下的线性方程组

上述方程组采用直接线性解法通常很难得到最优解,所以实际使用中一般会用其他优化方法,如奇异值分解、Levenberg-Marquarat(LM)算法等进行求解。
三、张正友标定中的单应性矩阵
上面我们推导的单应性矩阵是在相机运动的情况下进行的,但是相机标定的过程中相机是静止的,而运动的棋盘格标定板。在张正友标定中,用于标定的棋盘格是三维场景中的一个平面P,其在成像平面的像是另一个平面p,单应性矩阵就是指两个平面之间的映射关系,准确的来说是世界坐标系和像素坐标系之间的映射关系。
![]()

由于齐次坐标的尺度不变性,Zc就变成了尺度因子,则单应性矩阵H为:

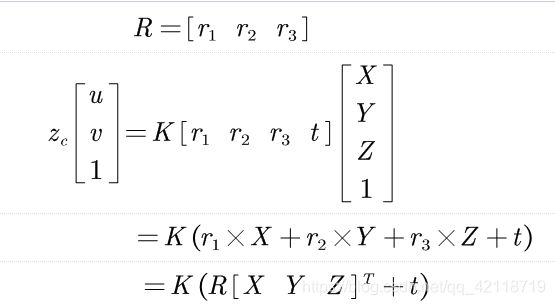
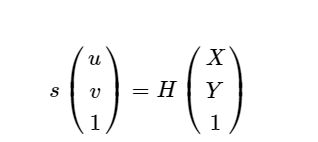
设棋盘格所在的平面为世界坐标系中Z=0的平面,这样棋盘格的任一角点P的世界坐标为(X,Y,0),根据小孔相机模型:

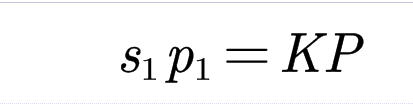
这里的s也是尺度因子,根据平面间的单应性,有
将上面两个等式进行整合,则可以得到单应矩阵H和相机矩阵(包含内参和外参)的相等,如下:
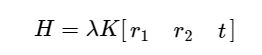

将旋转矩阵R的各个列向量和平移向量t使用H的列向量表示,
又由于,R是旋转矩阵,则其是正交矩阵,也就是其任意两个列向量的内积为0,列向量的模为1。故有:

则对于一幅棋盘标定版的图像(一个单应矩阵)可以获得两个对内参数的约束等式

四、根据单应矩阵求解相机内参
根据上面的等式:我们设:

因为方阵乘以方阵的转置得到的是一个对称矩阵,所以矩阵B是一个对称矩阵,其未知量只有6个,将6个未知量写为向量的形式:
![]()
另外我们做如下变化:
![]()
其中i=1,2,3;我们设:
![]()
为什么怎么设?我们把下面展开,你会发现Vij包含里面所有的未知量,之所以设成6项,是为了后面与向量b做乘法做铺垫,这里i=1,2,3;j=1,2,3;
那么约束等式:
![]()
这里你如果不懂:你把下面按照矩阵乘法一项一项的展开
![]()
然后你就明白下面等式:

有了上边的等式,再来看从一幅标定板图像得到的等式:

写成矩阵的形式有:

上面的一幅标定板图像取得的约束等式,假如有n幅图像,则
![]()
其中,V是一个2n×6的矩阵,b是一个6维向量,所以
当n≥3,可以得到b的唯一解;
当n=2,则可以假设扭曲参数γ=0作为额外的约束条件
当n=1,则值能计算两个相机的内参数
对于方程Vb=0可以使用SVD求得其最小二乘解。对VTV进行SVD分解,其最小特征值对应的特征向量就是Vb=0的最小二乘解,从而求得矩阵B。由于这里得到的B的估计值是在相差一个常量因子下得到的,所以有:
![]()
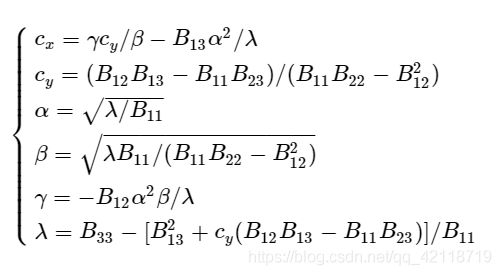
从而可以得到相机的各个内参数:
后面为了进一步增加标定结果的可靠性,可以使用最大似然估计(Maximum likelihood estimation)来优化上面估计得到的结果。
假设同一相机从n个不同的角度的得到了n幅标定板的图像,每幅图像上有m个像点。Mij表示第i幅图像上第j个像点对应的标定板上的三维点,则
![]()
![]()
其中,Ri,ti表示第i幅图像对应相机的旋转矩阵和平移向量,K是相机的内参数。则像点mij的概率密度函数是

构造似然函数

为了能够让L取得最大值,需要最小化下面的值
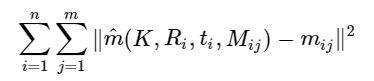
这是一个非线性优化问题,可以使用Levenberg-Marquardt的方法,利用上面得到的解作为初始值,迭代得到最优解。
参考文章:https://www.cnblogs.com/wangguchangqing/p/8335131.html
如果您认可我的文章,希望能够关注我的微信公众号,我会不定期更新工作中学到的东西和一些技术比较前沿的东西。

