webots和ros2笔记04-入门
在完成03-解析:https://zhangrelay.blog.csdn.net/article/details/112686566
本文通过一个移动机器人案例入门webots和ros2吧,这里以官方教程epuck为例介绍。
参考链接:https://github.com/cyberbotics/webots_ros2/wiki/Tutorial-E-puck-for-ROS2-Beginners
这个教程适用于仿真的epuck和真实的epuck机器人,但是这里只介绍仿真。
请务必确保webots和ros2已经配置正确,ubuntu直接参考如上链接,windows介绍如下:
仿真机器人
启动如下命令:
ros2 launch webots_ros2_epuck robot_launch.pyimport os
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument
from launch.substitutions.path_join_substitution import PathJoinSubstitution
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch import LaunchDescription
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
package_dir = get_package_share_directory('webots_ros2_epuck')
world = LaunchConfiguration('world')
webots = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory('webots_ros2_core'), 'launch', 'robot_launch.py')
),
launch_arguments=[
('package', 'webots_ros2_epuck'),
('executable', 'driver'),
('world', PathJoinSubstitution([package_dir, 'worlds', world])),
]
)
return LaunchDescription([
DeclareLaunchArgument(
'world',
default_value='epuck_world.wbt',
description='Choose one of the world files from `/webots_ros2_epuck/world` directory'
),
webots
])
简单介绍:

通过前三课,一个案例通常包括如上一些文件,启动文件都在launch中。这里提供了5种启动模式。

如果需要加载工具等,使用如下命令:
ros2 launch webots_ros2_epuck robot_with_tools_launch.py rviz:=true启动robot_with_tools_launch.py其中包含robot_launch.py和的robot_tools_launch.py示例。
如果启动真实机器人使用:
ros2 launch epuck_ros2 robot_launch.py这里不做具体介绍,只以仿真为主!
红外传感器,摄像头和LED灯布局
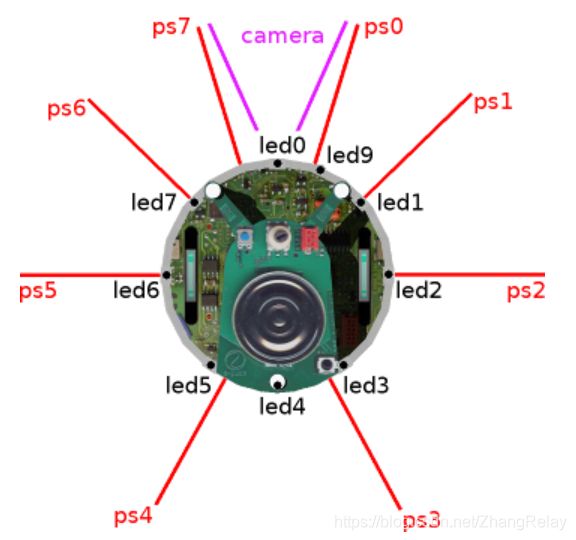
仿真中机器人俯视图:
前视图:

使用ros2 topic等工具指令可以查看主题等。

节点:

E-puck2具有8个红外传感器(名为ps0-7),所有这些红外传感器的数据类型为sensor_msgs/Range。因此,可以通过以下方法获得与传感器的距离:
ros2 topic echo /ps1除红外传感器外,e-puck2还升级了位于摄像头上方的ToF距离传感器。来自该传感器的数据也通过sensor_msgs/Range发布tof。
将所有距离传感器组合在一起创建sensor_msgs/LaserScan,因此可以直接在SLAM软件包中使用它:
ros2 topic echo /scan
相同的红外传感器充当光传感器。在ROS2驱动程序中,来自传感器的数据将发布为sensor_msgs/Illuminance消息(单位为lux),可以按以下方式订阅它:
ros2 topic echo /ls1请注意,在上图中,机器人周围有8个LED正确放置。发光二极管led0,led2,led4和led6可以打开或关闭,而发光二极管led1,led3,led5和led7具有可控的RGB分量。因此,对于二进制LED,开启指令如下:
ros2 topic pub /led1 std_msgs/Bool "{ "data": true }"
RGB为:
ros2 topic pub /led1 std_msgs/Int32 "{ "data": 0xFF0000 }"其中Int32的低3个字节表示R,G和B分量。

机器人LED灯发出红光!!!

可以知道绿光和蓝光指令分别如下:




更多色彩自主练习。通过可以编程实现绚丽彩灯模式。
速度控制
这个属于ROS2老案例了,turtlesim最常用案例也是如此,注意windows指令如下:
ros2 topic pub --rate 10 /cmd_vel geometry_msgs/Twist "{linear: {x: 0.1, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.8}}"
这个效果就是:
请注意,只有linear.x和angular.z有效,这是因为e-puck2是差动轮式机器人。
摄像头
参考上图左上角效果!
摄像机数据和详细信息通过image_raw(类型sensor_msgs/Image)和camera_info(类型sensor_msgs/CameraInfo)主题发布。与物理机器人驱动程序相比,没有sensor_msgs/CompressedImage,因为这些图像不需要通过网络传输的。
可以运行rqt,导航至Plugins > Visualization > Image View并选择主题/image_raw。请注意,图像编码是BGRA。
里程计
标准ROS2消息nav_msgs/Odometry用于发布里程计数据。可以通过以下方式订阅:
ros2 topic echo /odom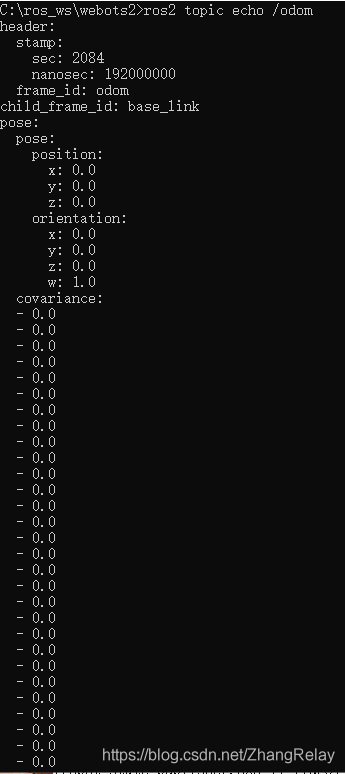
如果对协方差矩阵不感兴趣,则可以使用--no-arr参数隐藏数组:
ros2 topic echo --no-arr /odom还可以在rviz中显示里程计:
ros2 launch webots_ros2_epuck robot_tools_launch.py rviz:=trueIMU
e-puck2上有3D加速度计和3D陀螺仪硬件。可以通过imu主题(类型sensor_msgs/Imu)访问此数据,例如:
ros2 topic echo --no-arr /imu
地面传感器
可选模块,参考官方教程。

坐标变换
查看如下:
ros2 topic echo tf
通常使用tf2_monitor:
ros2 run tf2_ros tf2_monitorSLAM
ros2 launch webots_ros2_epuck robot_tools_launch.py rviz:=true mapper:=true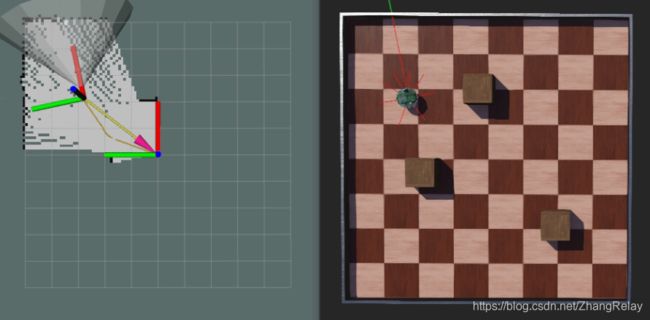
导航
ros2 launch webots_ros2_epuck robot_tools_launch.py rviz:=true nav:=true
校准
这部分也请参考官网。
位置估计的精度很大程度上取决于车轮之间的距离和车轮半径。
教程:
- E-puck for ROS2 Beginners
- Create Webots Robot
- Write ROS2 Driver
- Universal Launcher
- Custom ROS2 Driver and Package
- Using URDF or Xacro
- Navigate TurtleBot3
- SLAM with TurtleBot3
案例:
- Wheeled robots 轮式机器人
- E-puck
- TIAGo
- Khepera IV
- TurtleBot3 Burger
- Thymio II
- Robotic arms 机械臂
- UR5e and IRB 4600
- Universal Robots
- ABB IRB4600
技术细节
- Devices
- Robot
- LED
- Sensor
- Lidar
- Camera
- DistanceSensor
- IMU
- LightSensor
- WebotsNode
- WebotsLauncher
- JointStatePublisher
- Utils