一文剖析RPC
一、什么是RPC?RPC能解决什么问题?
问题提出:
有两个服务A和B,A和B分别部署在不同的服务器上,A要调用B服务的求和函数sumfunc,如何实现?
RPC远程过程调用(Remote Procedure Call),一种用来处理远程机器之前通信问题的一种解决方案,RPC的出发点是屏蔽掉网络协议层的繁琐协议,能给用户暴露最直接的远程调用API。简单的理解是一个节点请求另一个节点提供的服务。
要具体的理解RPC,我们先了解“过程”概念:
1)同一个进程,同一个线程内部函数调用
此为常见的函数调用,一个线程内部函数嵌套的使用。根据操作系统的基本知识,编译器编译的过程中会将函数调用处给出函数执行的入口地址,通过该地址,在线程的地址空间找到对应要调用执行的函数。本质上为本地调用。
2)不同进程之间的函数调用
不同进程之间的函数调用实际是不同进程之间的通信问题,即IPC。
IPC通信有很多种方法,比较常见的是管道、共享内存、消息队列等。本质上函数的调用依然是本地调用,因为它们的访问还是同一个机器,在同一个内存访问空间上。
3)不同机器上跨网络的函数调用
此种方式也称为远程调用。传统的使用远程调用都是使用socket,用户自己编写socket,然后客户端和服务端遵循某种数据流协议,进行通信,完成函数的功能调用。
RPC从某种意义上来说,也是这样的,这种远程的调用,显然会增加大量的代码开发中的工作量,因为一个函数调用的功能,需要做网络协议,数据序列化这些逻辑,开发难度不断提升。
二、RPC的原理是什么?
2.1 RPC框架
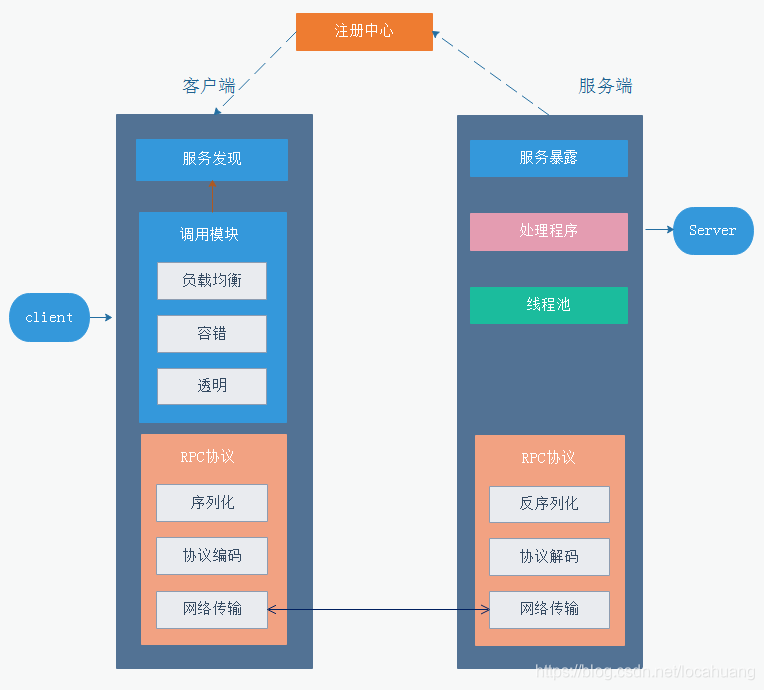
2.2 RPC核心功能框架
RPC采用客户机/服务器模式。请求程序就是一个客户机,而服务提供程序就是一个服务器。
RPC核心功能由5个部分组成:客户端、客户端Stub、网络传输模块、服务端Stud、服务端等。
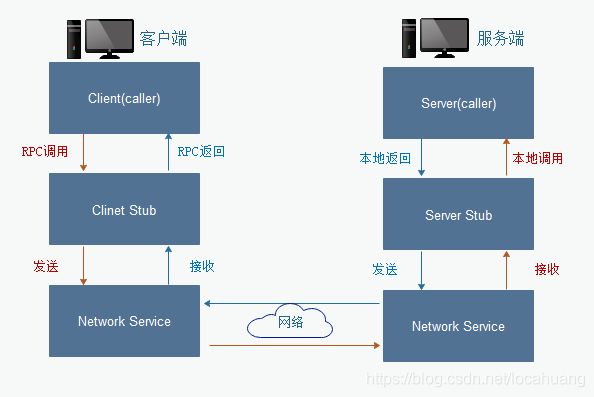
- 客户端(Client):服务调用方。
- 客户端存根(Client Stub):存放服务端地址信息,将客户端的请求参数信息打包成网络信息,再通过网络传输发送给服务端。
- 服务端存根(Server Stub):接收客户端发送过来的请求消息进行解包,然后再调用本地服务进行处理。
- 服务端(Server):服务的真正提供者。
- Network Service:底层传输,可以是TCP或HTTP。
本地调用中,函数体是直接通过函数指针来指定的,但是在远程调用中,函数指针是不行的,因为两个进程的地址空间是完全不一样的。这时,服务寻址可以使用 Call ID 映射,客户端和服务端分别维护一个函数和Call ID的对应表(所有的函数都必须有自己的一个 ID) 。
客户端在做远程过程调用时, 必须附上这个 ID。 当客户端需要进行远程调用时, 它就查一下这个表, 找出相应的 Call ID, 然后把它传给服务端,服务端也通过查表, 来确定客户端需要调用的函数, 然后执行相应函数的代码。
以客户端调用服务端addAge函数为例,过程如下:
// Client端
// Student student = Call(ServerAddr, addAge, student)
1. 将这个调用映射为Call ID。
2. 将Call ID,student(params)序列化,以二进制形式打包
3. 把2中得到的数据包发送给ServerAddr,这需要使用网络传输层
4. 等待服务器返回结果
5. 如果服务器调用成功,那么就将结果反序列化,并赋给student,年龄更新
// Server端
1. 在本地维护一个Call ID到函数指针的映射call_id_map,可以用Map<String, Method> callIdMap
2. 等待客户端请求
3. 得到一个请求后,将其数据包反序列化,得到Call ID
4. 通过在callIdMap中查找,得到相应的函数指针
5. 将student(params)反序列化后,在本地调用addAge()函数,得到结果
6. 将student结果序列化后通过网络返回给Client
2.3 RPC核心之网络传输协议
1)基于TCP协议实现的RPC
TCP协议处于协议栈的下层,能够更加灵活地对协议字段进行定制,减少网络开销,提高性能,实现更大的吞吐量和并发数。
2)基于HTTP协议实现的RPC
可以使用JSON和XML格式的请求或响应数据。HTTP协议是上层协议,发送包含同等内容的消息,使用HTTP协议传输所占用的字节数会比使用TCP协议传输所占用的字节数更高。
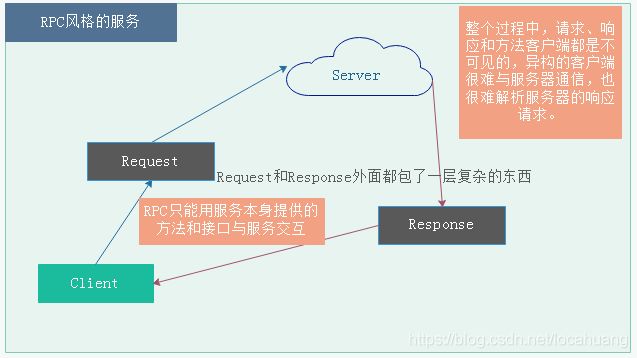
三、RPC vs Restful
RPC和Restful不是一个维度的概念,RPC涉及的维度更广。
1)从RPC风格的url和Restful风格的url比较
RPC url:/queryOrder?orderId=123
Restful url:Get /order?orderId=123
2)RPC是面向过程,Restful是面向资源
Restful风格的url在表述的精简性、可读性上都要更好。

Restful大部分是对外提供公共服务(Android、IOS客户端),更加容易理解,方便对外提供服务。
RPC更多的用于内部服务之间的调用。
四、常用的RPC有哪些?
1)gRPC
gRPC 是 Google 公布的开源软件, 基于谷歌的 HTTP 2.0 协议,并支持常见的众多编程语言。 RPC框架是基于HTTP协议实现的。
2)Thrift
Thrift 是 Facebook 的开源 RPC 框架,主要是一个跨语言的服务开发框架。用户只要在其之上进行二次开发就行,应用对于底层的 RPC 通讯等都是透明的。不过这个对于用户来说需要学习特定领域语言这个特性,还是有一定成本的。
3)Dubbo
Dubbo 是阿里集团开源的一个极为出名的 RPC 框架,在很多互联网公司和企业应用中广泛使用。协议和序列化框架都可以插拔是极其鲜明的特色。
4)BRPC
BRPC 是百度开源的PRC框架, “brpc”的含义是“better RPC”,已在百度有上百万实例的应用, C++语言实现,非常适合C/C++程序员学习。
五、RPC使用(BRPC)
5.1 BRPC编译
编译步骤参考:https://github.com/apache/incubator-brpc/blob/master/docs/cn/getting_started.md
需要注意的是,protobuf依赖库的版本,目前不支持protobuf3.0。
(一)命令安装依赖包
BRPC需要依赖三个开源库:是gflags,protobuf和leveldb。
- gflags 是用于像Linux命令行那样指定参数。
- protobuf 用于序列和反序列化以及它的 rpc定义。
- leveldb 用来存储的。
安装通用deps, gflags, protobuf, leveldb
sudo apt-get install -y git g++ make libssl-dev libgflags-dev libprotobuf-dev libprotoc-dev protobuf-compiler libleveldb-dev
如果需要leveldb
sudo apt-get install -y libsnappy-dev
(二)源码安装依赖包
源码安装的时候将路径设置为:--prefix=/usr
源码安装glog
$ git clone https://github.com/boboxxd/glog.git
$ cd glog
$ ./autogen.sh && ./configure --prefix=/usr && make && sudo make install
(三)编译BRPC
$ git clone https://gitee.com/baidu/BRPC.git
$ cd BRPC
$ sh config_brpc.sh --headers=/usr/include --libs=/usr/lib --with-glog
$ make
选项
- 支持glog,增加:
--with-glog。 - 不想支持调试符号,增加:
--nodebugsymbols。 - 支持thrift, 增加:
--with-thrift,并先安装thrift 。
5.2 运行案例
百度给出了很多的案例,在git上,可以直接使用,我们这里使用最简单的读写例子。
$ cd example/echo_c++
$ make
$ ./echo_server &
$ ./echo_client
这里编译出来的是静态链接,如果想使用动态连接,先make clean然后再LINK_SO=1 make,生成动态链接的执行文件。
5.3 RPC调用实例
1)服务端源码
// Licensed to the Apache Software Foundation (ASF) under one
// or more contributor license agreements. See the NOTICE file
// distributed with this work for additional information
// regarding copyright ownership. The ASF licenses this file
// to you under the Apache License, Version 2.0 (the
// "License"); you may not use this file except in compliance
// with the License. You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing,
// software distributed under the License is distributed on an
// "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY
// KIND, either express or implied. See the License for the
// specific language governing permissions and limitations
// under the License.
// A server to receive EchoRequest and send back EchoResponse.
#include 2)客户端源码
// Licensed to the Apache Software Foundation (ASF) under one
// or more contributor license agreements. See the NOTICE file
// distributed with this work for additional information
// regarding copyright ownership. The ASF licenses this file
// to you under the Apache License, Version 2.0 (the
// "License"); you may not use this file except in compliance
// with the License. You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing,
// software distributed under the License is distributed on an
// "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY
// KIND, either express or implied. See the License for the
// specific language governing permissions and limitations
// under the License.
// A client sending requests to server every 1 second.
#include BRPC项目自带范例:BRPC/example