牛头刨床机构动力学的分析(C语言建模)
对于机械设计机构运动学与力学的分析,一般使用MATLAB软件进行计算和分析会比较方便。然鹅,在成功地下载MATLAB安装包失败后,咱们还是要玩点反常的东西,比如说,用C语言建模计算分析(ಡωಡ)。
Part 1.背景介绍
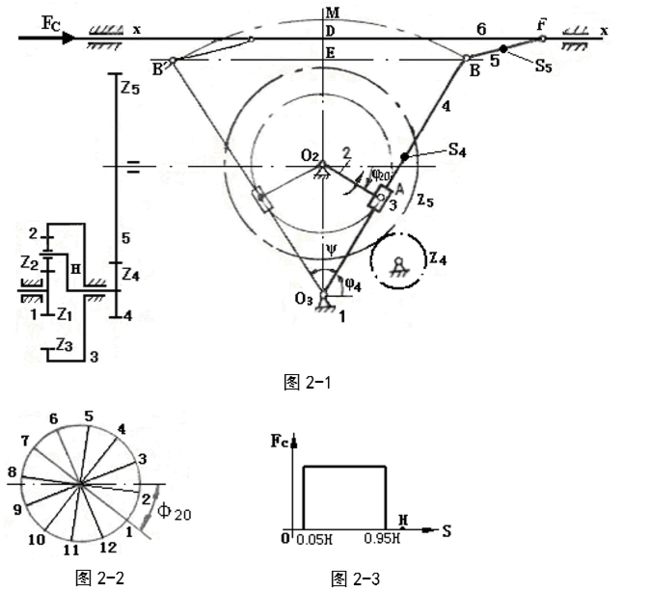
牛头刨床是一种用于平面加工的机床。如图2-1所示,电机通过行星轮系及齿轮Z4、Z5减速带动曲柄2转动。刨床工作时,由导杆机构(2、3、4、5、6)带动刨头及刨刀作往复运动。刨头向左时,刨刀进行切削,这个行程称为工作行程,此时要求刨头的速度低些,且作近似的等速运动。在工作行程,刨头受到较大的切削力,如图2-3所示。刨头右行时,刨刀不切削称为空回行程,此时希望刨头速度高些,以提高生产力。
太抽象了?咱们看一下动图吧(动图经过引用):
Part 2.原始数据
如以下图表所示,参数符号含义分别为:H:刨头行程;K:行程速比系数; Fc:切削阻力;m4、m5、m6分别为导杆、连杆及刨头的质量;Js4、Js5分别为导杆4及连杆5绕各自质心的转动惯量;n1:电机转速;n2:曲柄2及齿轮5的转速; k:行星轮个数。

根据原始数据,我们可以计算出几个重要参数:

对程序变量进行设定并声明,我们取摆角的半角(41.5°/2=20.75°),将原动件周期开始之前的半摆角设为原动件角度phi2的初始,即-20.75°。均匀取100个等分点作为原动件在每个等分角度点的角度(即每两个连续点之间相差3.6°),后面的每个研究对象的位移、速度、加速度、受力分析均以原动件的每一个角度为参考标准,即他们的图像随着原动件角度的变化而变化。
#include
#include
#define Pi acos(-1.0)//Π的精确值
#define N 100//均匀取N个点
int main(){
float H=0.55,L1=0.400,L2=0.1416,L3=0.776,L4=0.751,L5=0.233;
float Z=Pi/180,w=80*Pi/30;
float phi2[N],phi[N];
float dphi=(float)360/N;//将360°圆周等分为N个微分
float dT=((float)1000/60)/N;//转速为1000rpm,取N个时间点
int i;
for(i=0;i Part 3.导杆机构的运动分析



由此,我们得到相对于参考系(即原动件角)时,杆L4、L5的的角位置和O3A(S3)、刨刀(L6)的绝对位移。
float S3[N],phi4[N],phi5[N],L6[N],S5[N];//L6为刨刀位移
FILE *fp;
fp=fopen("角度与位移.xls","w");//生成测试文件(xls)
fprintf(fp,"phi2\tS3\t\tphi2\tphi4\t\tphi2\tphi5\t\tphi2\tS6\n");
for(i=0;i将生成的数据导入EXCEL表格,并插入图表,图像如下:

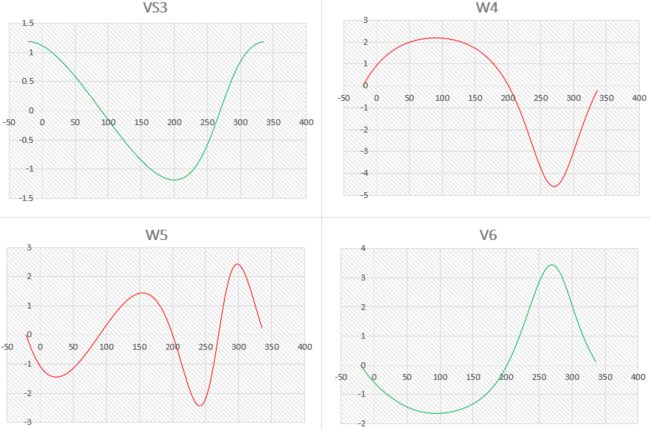
接着,我们求出它们的绝对速度,值得注意的是:S3‘、V5、V6是线速度,w4、w5是角速度:

float w4[N],w5[N],V5[N],V6[N];//构件4和构件5的角速度,杆5质心与刨刀6线速度
float VS3[N];//构件3速度
FILE *fp1;
fp1=fopen("速度.xls","w");
fprintf(fp1,"phi2\tVS3\t\tphi2\tW4\t\tphi2\tW5\t\tphi2\tV6\n");
for(i=0;i将生成的数据导入EXCEL表格,并插入图表,图像如下:
进一步地,求解加速度:
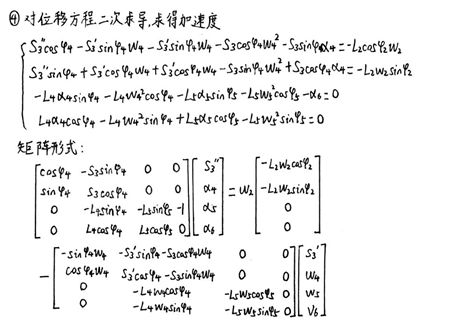
哎呀,面对这些乱七八糟的变量该咋办?别急,有图有真相:

将P-M·N矩阵用A、B、C、D字母表示,则:

FILE *fp2;
fp2=fopen("加速度.xls","w");
fprintf(fp2,"phi2\taS3\t\tphi2\ta4\t\tphi2\ta5\t\tphi2\ta6\n");
float aS3[N],a4[N],a5[N],a6[N];
for(i=0;i下一步操作->秀图:

Part 4.导杆机构的动态受力分析
在保留越程槽长度的范围内,允许有切削,否则不能切削 。基于此工作原理,可以写出计算切削阻力的程序:
float M4=15,M5=4,M6=58,Js4=0.7,Js5=0.025,Fc[N],Ls4,Ls5,E[N],dE[N],Mp[N],J4;
Ls4=0.5*L4;
Ls5=0.5*L5;
FILE *fp3;
fp3=fopen("切削阻力.xls","w");
fprintf(fp3,"phi2\tFc\n");
for(i=0;i0.05*H&&fabs(L6[0]-L6[i])<0.95*H&&(phi2[i] 
对于平衡力矩Mp,我们可以使用动能定理进行求解:

前面我们已求得V6、W5、W4,现在还剩一个V5没求,现在开始求吧:
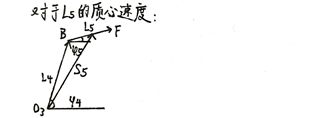

由V5^2=V5x^2+V5y^2可得V5:
for(i=0;ibut……何必那么麻烦?像V4=w4*L4/2那样直接套用公式V5=w5*L5/2来计算杆5的质心速度不就行了吗?

杆5被杆4连接,在这里,我们以点O3为参考点,w4既是杆4的相对角速度,又是绝对角速度,它当然可以直接用于求线速度。可之前求的w5是绝对角速度呀,它怎么能直接这样套公式呢,不信,咱们看看|V5/w5|的图像吧:

很明显,|V5/w5|的值不是常数,更不可能是L5/2。
接着,求完V5后可以直接套用公式求解平衡力矩了:
J4=Js4+M4*(0.5*L4)*(0.5*L4);
FILE *fp4;
fp4=fopen("平衡力矩.xls","w");
fprintf(fp4,"phi2\tMp\n");
for(i=0;i
以上是基于C语言实现牛头刨床机构动力学建模分析的全部内容,使用MATLAB效果相同,正经人表示->面对复杂的建模,还是建议使用MATLAB。如有错漏,欢迎指正~~~