三维叉乘怎么算_《三维点云处理》学习笔记(1):平面法向量估计

一、前言
《三维点云处理》学习笔记系列文章是我在学习深蓝学院的这门课时做的笔记,其中很多截图都来自于老师的ppt。主要目的是记录和备忘,以及分享和交流。
code:https://github.com/QinZiwen/analyze_pointcloud
二、什么是三维点云
2.1 定义
三维点云(point cloud)就是很多点的统称(^_^),当然这里点可以是普通意义上的点,即三维向量,表示点在三维坐标系中的位置;也可以是广义上的点,可能是一个N纬的向量,其中包含点的三维位置,颜色,语义信息等等,笼统的可以认为是三维位置加其他属性。这些其他属性有的可以从传感器中直接获取,有的则需要点云数据分析后得到。为了简单起见,我们从最简单的三维点云开始(后面简称点云),即每个点由他的三维位置表示。那么很多点就可以用3 * N矩阵表示,或者N * 3的矩阵表示,如下图左边所示,右边就是广义的情况。

2.2 点云的来源
点云的来源有很多:激光雷达,深度摄像头,CAD模型,SLAM/SFM

2.3 点云的应用
在机器人和自动驾驶领域:定位(包括3DoF,6DoF的定位),场景描述等
在消费电子领域:Face ID,hololens的hand pose, human pose等


2.4 点云的优缺点
点云可以看做是空间的一种表达,除此之外,空间还可以使用mesh,voxel grid,octree表示。
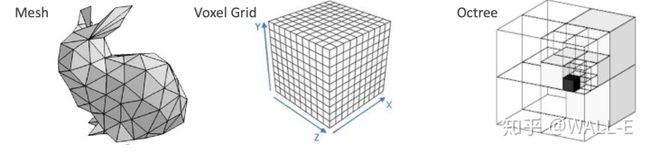
点云相比于其他表达而言,优点是简单,不仅理解起来简单,而且数学表示上也非常简单。缺点也很明显,具有稀疏性,平移和旋转不变性,无序性等。
三、PCA(Principle Component Analysis)
PCA在点云预处理,平面检测,法向量求解等中都有应用,我之前还有见过用PCA对点云中的点分类,地面点,墙面点,物体上的点等,然后再做其他处理。所以我们就从PCA的推导开始,在开始之前,我们先介绍两个定理,会在PCA的证明中用到。
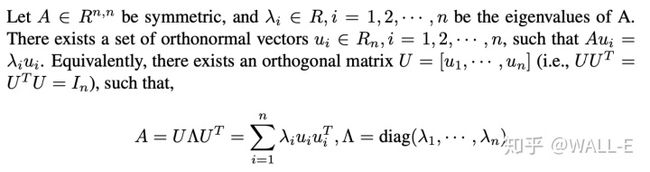
第一个是谱定理,大致意思是对于一个对称矩阵,我们可以用他的特征值特征向量的线性组合表示,严格说明如下:
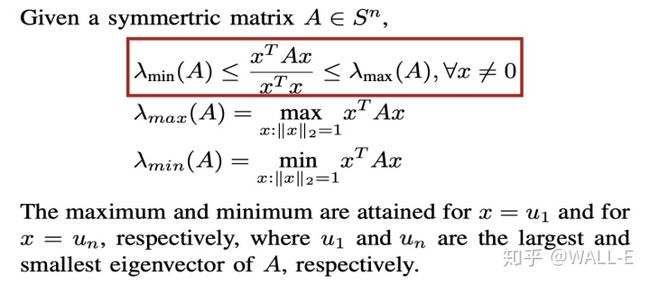
第二个是瑞利熵(瑞利熵和广义瑞利熵_人工智能_wyl1813240346的博客-CSDN博客)
下面介绍PCA,他的输入输出是:

和线性代数中一样,我们默认是列向量。
PCA叫主成分分析,那么什么是主成分(或主方向)?数据在该方向上的方差最大。从主方向的定义上就可以看出PCA和方差有千丝万缕的联系,在下面的证明过程中,我们可以留意一下。
首先,对输入数据去均值:
屏蔽向量中的具体数字对计算的影响,去除均值之后,留下可以理解为数据的分布特征,只不过他依然蕴含在所有的向量中。
PCA希望寻找一个方向(主方向),使得数据在该方向上的方差最大,我们假设一个主方向
由于数据已经减去了均值,那么根据方差的定义,平方求和就是方差了:

我们的目标是方差最大,所以:

注意:这个式子求解的变量是
在这里,

他告诉了我们对称阵两边乘上向量后的上下界,由于
怎么得到特征值特征向量呢?当然是SVD喽(SVD(奇异值分解)小结 - EndlessCoding - 博客园),对

那么:
如果特征值由大到小排列,那么
大致思路是:从原数据中减掉原数据在主防线上的投影向量后,在按照上面方法求特征向量。

在这里
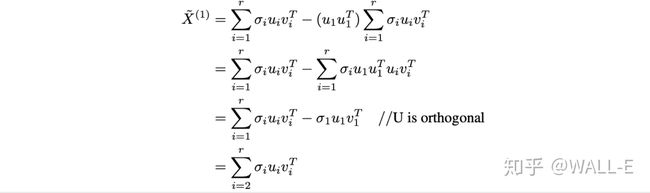
上式相当于得到了

当我们再去求方差最大时对应的向量时,可以发现,正式原始数据的第二大特征向量,至此我们得到了
总结一下PCA算法:
1)去中心:
2)求协方差矩阵:
3)对

4)主要方向就是
四、PCA的应用之一

注意:
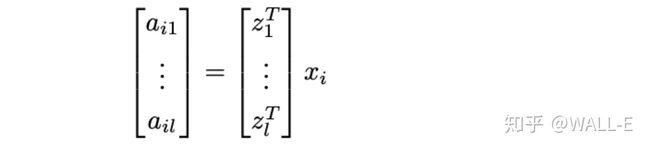
将原始数据进行压缩(降维):
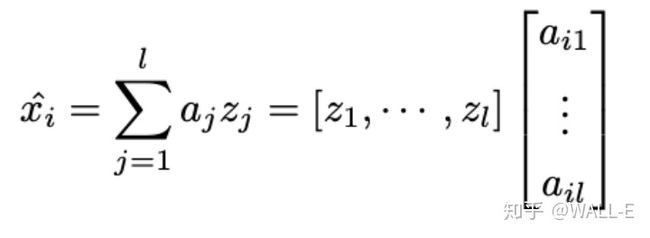
解压(升维),就是等式两边同时乘上特征向量组成举证的转置(因为是正交阵,所以逆和转置相等):
五、核PCA(Kernel PCA)
5.1 核PCA推导
传统PCA本质上是线性的,我们可以回想不管是PCA推到过程还是PCA的应用例子,其中基本应用的都是矩阵乘法,矩阵乘法本质上是一只中线性变换。
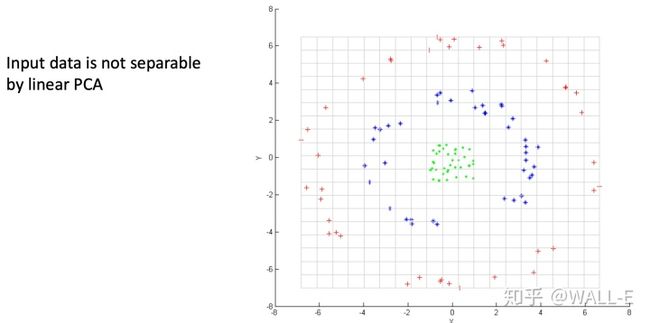
如下图所示,绿色和红色各表示一类数据,我们想找到一个主方向,将数据投影后,可以用直线将两类点分开。但是在二维空间上我们很难找到这一个主方向。

假设上图中的数据为:
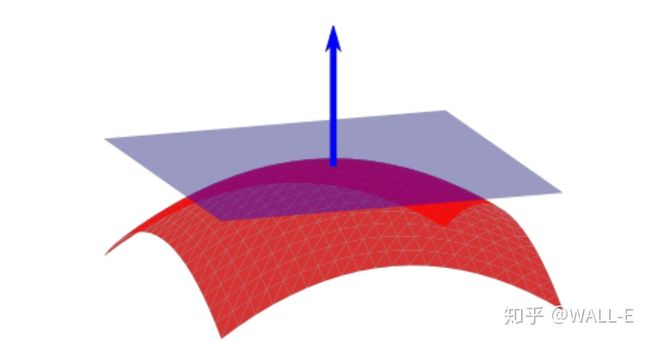
我们设计一个函数:

可以将原来二维数据升到三维数据,如下图所示,当然这个函数,你可以设计成各种各样:

此时,我们发现绿色和红色点线性可分了。
我们套用前面介绍的PCA算法:
1)使用

2)计算协方差矩阵:

3)求
不知道你有没有注意到,
下面我们来推到核PCA,看看他是怎么解决这个问题。
根据特征值特征向量的定义:

其中:
将

发现等式左边除了

这个式子在说,特征向量是输入数据的线性组合。其实这个也可以直观理解,原来的PCA也就是把数据旋转平移缩放后,找到了一些主方向。

在这里我们定义一个核函数

带入上式

等式两边同乘

定义一个gram矩阵(Gram矩阵_人工智能_wangyang20170901的博客-CSDN博客):

整理上式,得:

我们稍微回头看一下,上面这一堆做了什么工作。因为

好事往往多磨,组合后我们还得保证

用
也就说为了单位化

为什么说上式,依然没有办法求解,因为
我们想一下,这里求主方向的目的是什么?其中一个很重要的原因是为了把数据投影到主方向上。那我们就先把数据投影到

哎,核函数又出现,也就说说如果我们可以求出这个核函数,那么问题就得解了,因为不用管
那就去中心化喽:

接着:
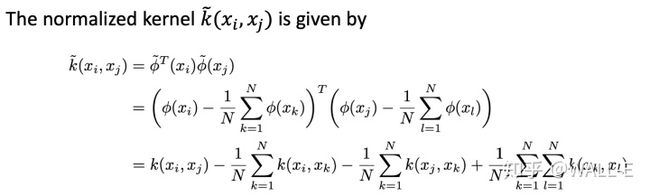
对于所有数据我们可以写一个核矩阵:

所有的矛头都指向了核函数,下面介绍几种常用的核函数。
5.2 核函数

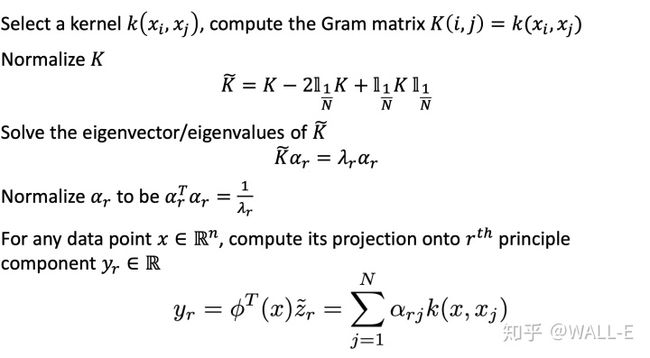
5.3 核PCA算法
5.4 核PCA的例子

5.5 核PCA的讨论
1)核函数是得我们避免显式计算高纬向量。
2)核PCA是得我们突破了输入数据空间的限制。
六、PCA在点云中的应用
6.1 平面法向量估计
思想:找一堆点最小特征值对应的特征向量。
6.2 平面发向量算法

6.3 如何处理噪声

参考:
[1] 常用数学符号的 LaTeX 表示方法: http://www.mohu.org/info/symbols/symbols.htm