Paddle图像分割从入门到实践(二):FCN与Unet
Fully Convolutional Networks(FCN)
什么是FCN? 就是全卷积网络没有全连接层(FC).
如何做语义分割? 语义分割 像素级分类
像素级分类
和图像分类有什么关系? 替换FC为Conv
1x1 Conv
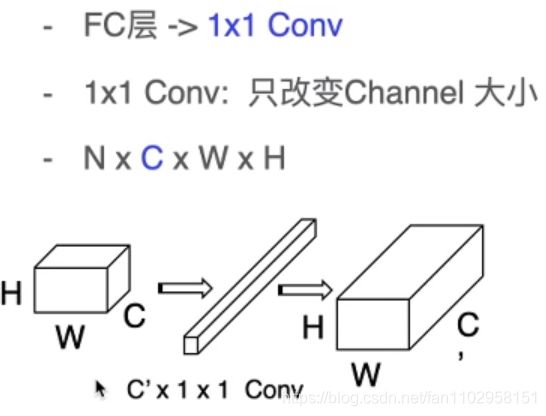
在通道维度("C")上进行改变,即在通道上降维或升维.
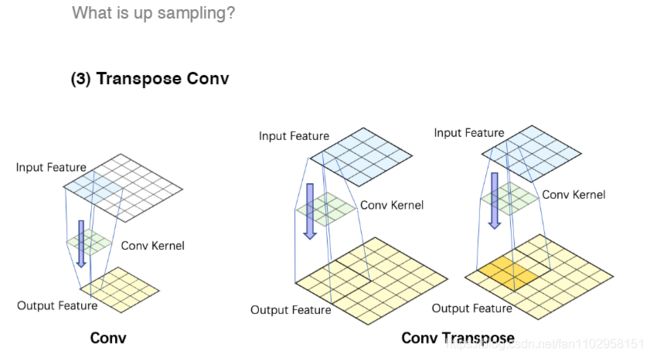
Upsample
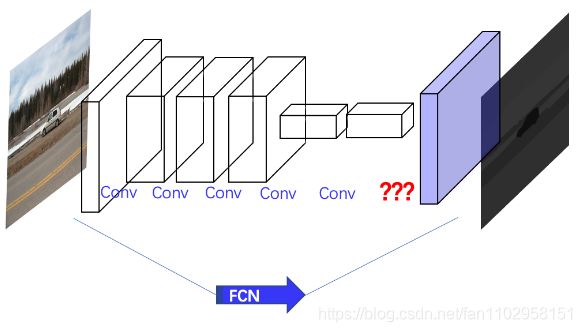
目的:将H和W收缩后的特征图恢复为与输入图像尺寸相同的大小.
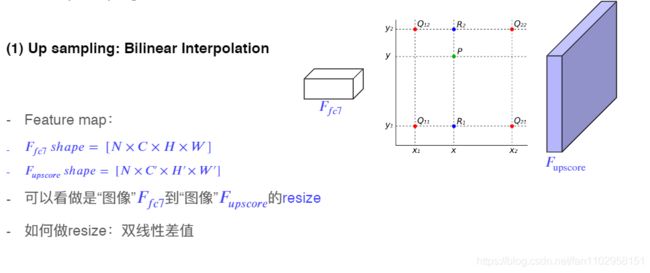
Up-sampling

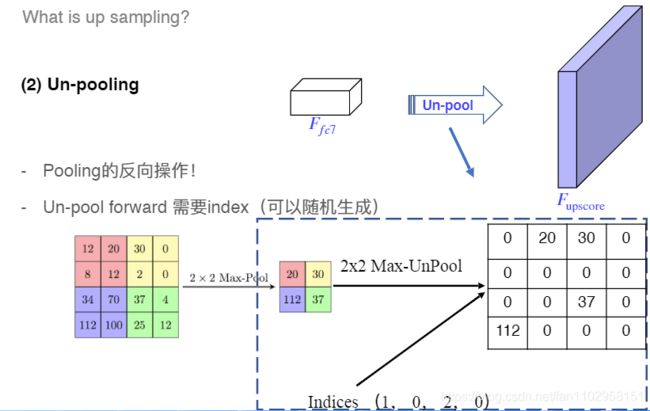
Un-pooling
Transpose Conv
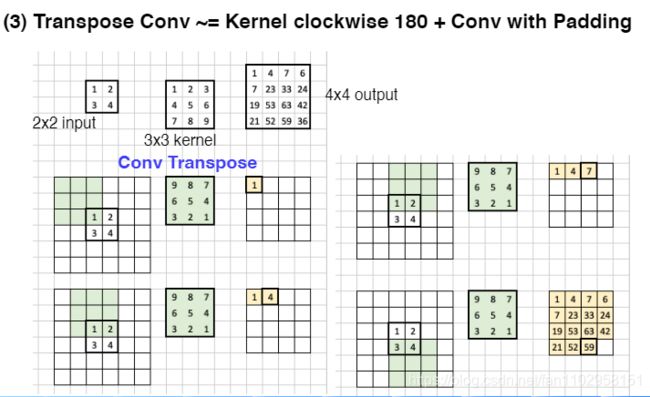
实际在计算机中卷积运算都是转换为矩阵运算进行的
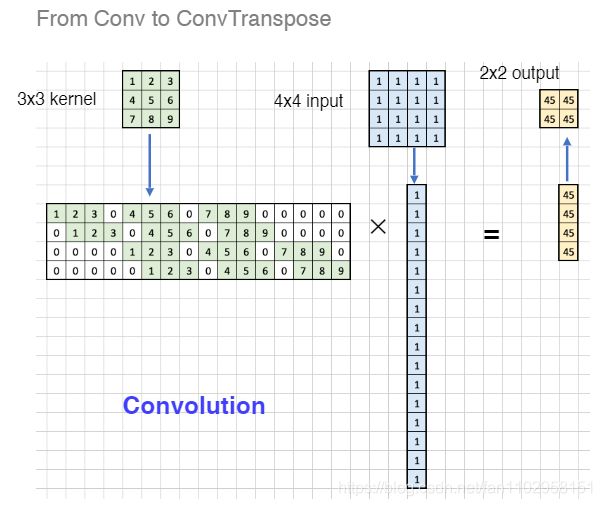
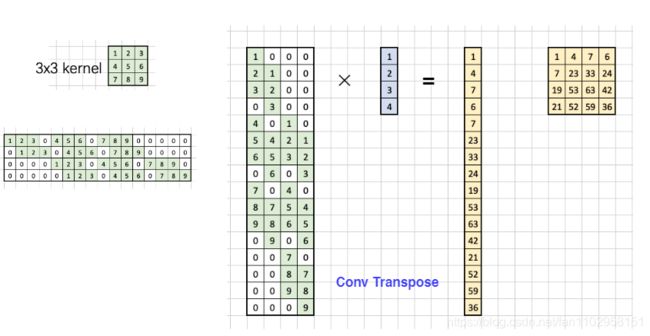
同理,反卷积转换为矩阵运算,则应该变为
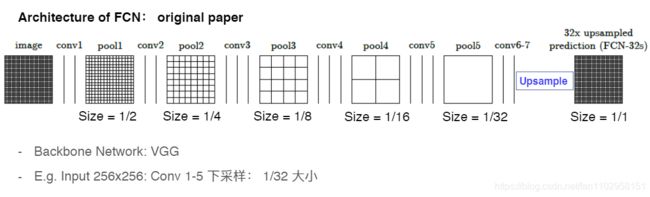
FCN网络结构
Encoder和Decoder
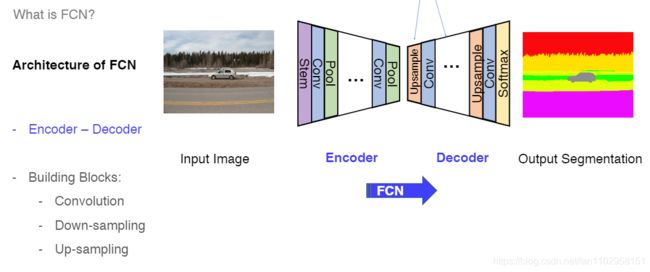
先将原图经过卷积和pooling层(encoder)得到一个相对长和宽维度较小的特征图,然后再通过卷积和上采样层(decoder)将特征恢复为与原图长宽相等且通道数为分类类别数的结果图输出.
想要分割结果好,就是在对一个像素点做分类时,不仅仅只考虑这一个点,而是利用周围点的信息,甚至是全图的信息来辅助判断它 的类别. 但是,一个点周围的信息可能会因为所选范围的大小呈现出不同的结果,那么为了能准确的找到我们想要的"正确"结果,最稳妥的算法就是在我们综合不同大小邻域的信息,于是FCN采用了"Multilayer Fusion"的结构
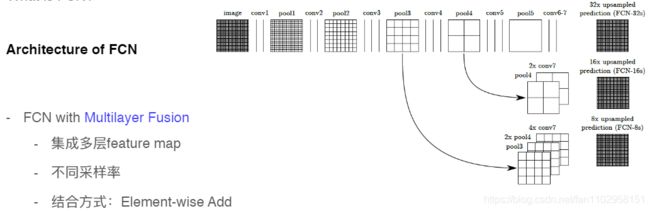
简单来看,就是在网络结构中将Decoder与Encoder中尺寸相同但感受野不同的特征图进行相加.
网络结构搭建代码(PaddlePaddle)
backbone VGG
import numpy as np
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import Dropout
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Pool2D
from paddle.fluid.dygraph import Linear
model_path = {
#'vgg16': './vgg16',
#'vgg16bn': './vgg16_bn',
# 'vgg19': './vgg19',
# 'vgg19bn': './vgg19_bn'
}
class ConvBNLayer(fluid.dygraph.Layer):
def __init__(self,
num_channels,
num_filters,
filter_size=3,
stride=1,
groups=1,
use_bn=True,
act='relu',
name=None):
super(ConvBNLayer, self).__init__(name)
self.use_bn = use_bn
if use_bn:
self.conv = Conv2D(num_channels=num_channels,
num_filters=num_filters,
filter_size=filter_size,
stride=stride,
padding=(filter_size-1)//2,
groups=groups,
act=None,
bias_attr=None)
self.bn = BatchNorm(num_filters, act=act)
else:
self.conv = Conv2D(num_channels=num_channels,
num_filters=num_filters,
filter_size=filter_size,
stride=stride,
padding=(filter_size-1)//2,
groups=groups,
act=act,
bias_attr=None)
def forward(self, inputs):
y = self.conv(inputs)
if self.use_bn:
y = self.bn(y)
return y
class VGG(fluid.dygraph.Layer):
def __init__(self, layers=16, use_bn=False, num_classes=1000):
super(VGG, self).__init__()
self.layers = layers
self.use_bn = use_bn
supported_layers = [16, 19]
assert layers in supported_layers
if layers == 16:
depth = [2, 2, 3, 3, 3]
elif layers == 19:
depth = [2, 2, 4, 4, 4]
num_channels = [3, 64, 128, 256, 512]
num_filters = [64, 128, 256, 512, 512]
self.layer1 = fluid.dygraph.Sequential(*self.make_layer(num_channels[0], num_filters[0], depth[0], use_bn, name='layer1'))
self.layer2 = fluid.dygraph.Sequential(*self.make_layer(num_channels[1], num_filters[1], depth[1], use_bn, name='layer2'))
self.layer3 = fluid.dygraph.Sequential(*self.make_layer(num_channels[2], num_filters[2], depth[2], use_bn, name='layer3'))
self.layer4 = fluid.dygraph.Sequential(*self.make_layer(num_channels[3], num_filters[3], depth[3], use_bn, name='layer4'))
self.layer5 = fluid.dygraph.Sequential(*self.make_layer(num_channels[4], num_filters[4], depth[4], use_bn, name='layer5'))
self.classifier = fluid.dygraph.Sequential(
Linear(input_dim=512 * 7 * 7, output_dim=4096, act='relu'),
Dropout(),
Linear(input_dim=4096, output_dim=4096, act='relu'),
Dropout(),
Linear(input_dim=4096, output_dim=num_classes))
self.out_dim = 512 * 7 * 7
def forward(self, inputs):
x = self.layer1(inputs)
x = fluid.layers.pool2d(x, pool_size=2, pool_stride=2)
x = self.layer2(x)
x = fluid.layers.pool2d(x, pool_size=2, pool_stride=2)
x = self.layer3(x)
x = fluid.layers.pool2d(x, pool_size=2, pool_stride=2)
x = self.layer4(x)
x = fluid.layers.pool2d(x, pool_size=2, pool_stride=2)
x = self.layer5(x)
x = fluid.layers.pool2d(x, pool_size=2, pool_stride=2)
x = fluid.layers.adaptive_pool2d(x, pool_size=(7,7), pool_type='avg')
x = fluid.layers.reshape(x, shape=[-1, self.out_dim])
x = self.classifier(x)
return x
def make_layer(self, num_channels, num_filters, depth, use_bn, name=None):
layers = []
layers.append(ConvBNLayer(num_channels, num_filters, use_bn=use_bn, name=f'{name}.0'))
for i in range(1, depth):
layers.append(ConvBNLayer(num_filters, num_filters, use_bn=use_bn, name=f'{name}.{i}'))
return layers
def VGG16(pretrained=False):
model = VGG(layers=16)
if pretrained:
model_dict, _ = fluid.load_dygraph(model_path['vgg16'])
model.set_dict(model_dict)
return model
def VGG16BN(pretrained=False):
model = VGG(layers=16, use_bn=True)
if pretrained:
model_dict, _ = fluid.load_dygraph(model_path['vgg16bn'])
model.set_dict(model_dict)
return model
def VGG19(pretrained=False):
model = VGG(layers=19)
if pretrained:
model_dict, _ = fluid.load_dygraph(model_path['vgg19'])
model.set_dict(model_dict)
return model
def VGG19BN(pretrained=False):
model = VGG(layers=19, use_bn=True)
if pretrained:
model_dict, _ = fluid.load_dygraph(model_path['vgg19bn'])
model.set_dict(model_dict)
return model
def main():
with fluid.dygraph.guard():
x_data = np.random.rand(2, 3, 224, 224).astype(np.float32)
x = to_variable(x_data)
model = VGG16()
model.eval()
pred = model(x)
print('vgg16: pred.shape = ', pred.shape)
model = VGG16BN()
model.eval()
pred = model(x)
print('vgg16bn: pred.shape = ', pred.shape)
model = VGG19()
model.eval()
pred = model(x)
print('vgg19: pred.shape = ', pred.shape)
model = VGG19BN()
model.eval()
pred = model(x)
print('vgg19bn: pred.shape = ', pred.shape)
if __name__ == "__main__":
main()
FCN8s
import numpy as np
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import Conv2DTranspose
from paddle.fluid.dygraph import Dropout
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Pool2D
from paddle.fluid.dygraph import Linear
from vgg import VGG16BN
# create fcn8s model
class FCN8s(fluid.dygraph.Layer):
def __init__( self, num_classes=59):
super(FCN8s, self).__init__()
backbone = VGG16BN(pretrained=False)
self.layer1 = backbone.layer1
self.layer1[0].conv._padding = [100, 100] #防止输入图片尺寸过小时,导致pool到中间层时,特征特征图消失
self.pool1 = Pool2D(pool_size=2, pool_stride=2, ceil_mode=True)
self.layer2 = backbone.layer2
self.pool2 = Pool2D(pool_size=2, pool_stride=2, ceil_mode=True)
self.layer3 = backbone.layer3
self.pool3 = Pool2D(pool_size=2, pool_stride=2, ceil_mode=True)
self.layer4 = backbone.layer4
self.pool4 = Pool2D(pool_size=2, pool_stride=2, ceil_mode=True)
self.layer5 = backbone.layer5
self.pool5 = Pool2D(pool_size=2, pool_stride=2, ceil_mode=True)
self.fc6 = Conv2D(512, 4096, 7, act='relu')
self.fc7 = Conv2D(4096, 4096, 1, act='relu')
self.drop6 = Dropout()
self.drop7 = Dropout()
self.score = Conv2D(4096, num_classes, 1)
self.score_pool3 = Conv2D(256, num_classes, 1)
self.score_pool4 = Conv2D(512, num_classes, 1)
self.up_output = Conv2DTranspose(num_channels=num_classes,
num_filters=num_classes,
filter_size=4,
stride=2,
bias_attr=False)
self.up_pool4 = Conv2DTranspose(num_channels=num_classes,
num_filters=num_classes,
filter_size=4,
stride=2,
bias_attr=False)
self.up_final = Conv2DTranspose(num_channels=num_classes,
num_filters=num_classes,
filter_size=16,
stride=8,
bias_attr=False)
def forward(self, inputs):
x = self.layer1(inputs)
x = self.pool1(x) # 1/2
x = self.layer2(x)
x = self.pool2(x) # 1/4
x = self.layer3(x)
x = self.pool3(x) # 1/8
pool3 = x
x = self.layer4(x)
x = self.pool4(x) # 1/16
pool4 = x
x = self.layer5(x)
x = self.pool5(x) # 1/32
x = self.fc6(x)
x = self.drop6(x)
x = self.fc7(x)
x = self.drop7(x)
x = self.score(x)
x = self.up_output(x)
up_output = x # 1/16
x = self.score_pool4(pool4)
x = x[:, :, 5:5+up_output.shape[2], 5:5+up_output.shape[3]]
up_pool4 = x
x = up_pool4 + up_output
x = self.up_pool4(x)
up_pool4 = x
x = self.score_pool3(pool3)
x = x[:, :, 9:9+up_pool4.shape[2], 9:9+up_pool4.shape[3]]
up_pool3 = x # 1/8
x = up_pool3 + up_pool4
x = self.up_final(x)
x = x[:, :, 31:31+inputs.shape[2], 31:31+inputs.shape[3]]
return x
def main():
with fluid.dygraph.guard():
x_data = np.random.rand(2, 3, 512, 512).astype(np.float32)
x = to_variable(x_data)
model = FCN8s(num_classes=59)
model.eval()
pred = model(x)
print(pred.shape)
if __name__ == '__main__':
main()
为什么要padding 100?
当输入图像大小为1x1时,
L1+Pool1 100x100
L2+Pool2 50x50
L3+Pool3 25x25
L4+Pool4 13x13
L5+Pool5 7x7
L6+L7 1x1
padding的目的就是保证特征图卷积到最小时,尺寸不会完全消失.
为什Cropoing [5,9,31]?
因为Conv与pool的尺寸变换为
而转置卷积的尺寸变换为
![H'_{out} = \frac{(H_{in} + stride[0] - 1)}{stride[0]} \\ W'_{out} = \frac{(W_{in} + stride[1] - 1)}{stride[1]}](http://img.e-com-net.com/image/info8/68f2eea7ae7f4ed0b679a3f75212c73c.gif)
若L5+Pool5后输出特征维度为H,则
Tconv1 2H-10 L4的输入为2H crop size 10//2 = 5
Tconv2 4H-18 L3的输入为4H corp size 18//2 = 9
Tconv3 32H-136 L2的输入为32H = S +200 crop size 200-136//2 = 32
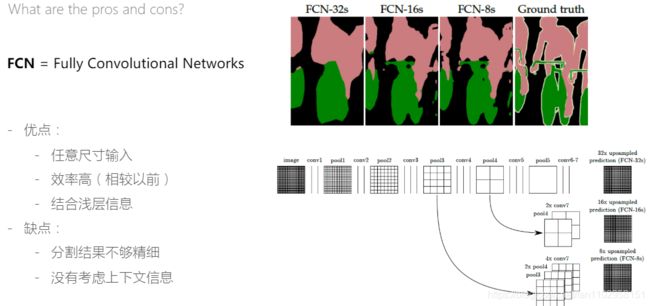
FCN的优缺点
Unet
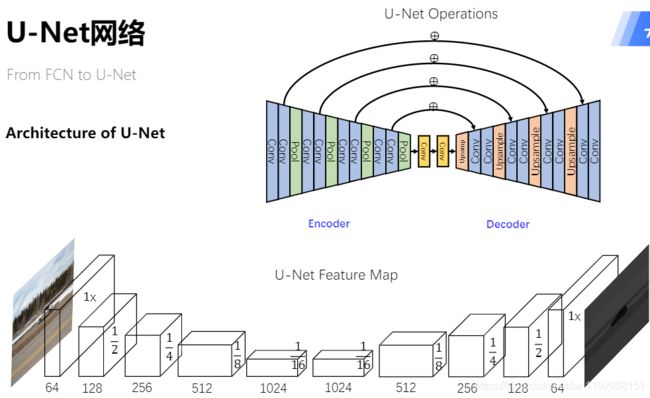
特点:将element-wise的相加,改为了在通道数C维度上的Concate.
实践代码
backbone Resnet
import numpy as np
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Pool2D
from paddle.fluid.dygraph import Linear
model_path = {'ResNet18': './resnet18',
'ResNet34': './resnet34',
'ResNet50': './resnet50',
'ResNet101': './resnet101',
'ResNet152': './resnet152'}
class ConvBNLayer(fluid.dygraph.Layer):
def __init__(self,
num_channels,
num_filters,
filter_size,
stride=1,
groups=1,
act=None,
dilation=1,
padding=None,
name=None):
super(ConvBNLayer, self).__init__(name)
if padding is None:
padding = (filter_size-1)//2
else:
padding=padding
self.conv = Conv2D(num_channels=num_channels,
num_filters=num_filters,
filter_size=filter_size,
stride=stride,
padding=padding,
groups=groups,
act=None,
dilation=dilation,
bias_attr=False)
self.bn = BatchNorm(num_filters, act=act)
def forward(self, inputs):
y = self.conv(inputs)
y = self.bn(y)
return y
class BasicBlock(fluid.dygraph.Layer):
expansion = 1 # expand ratio for last conv output channel in each block
def __init__(self,
num_channels,
num_filters,
stride=1,
shortcut=True,
name=None):
super(BasicBlock, self).__init__(name)
self.conv0 = ConvBNLayer(num_channels=num_channels,
num_filters=num_filters,
filter_size=3,
stride=stride,
act='relu',
name=name)
self.conv1 = ConvBNLayer(num_channels=num_filters,
num_filters=num_filters,
filter_size=3,
act=None,
name=name)
if not shortcut:
self.short = ConvBNLayer(num_channels=num_channels,
num_filters=num_filters,
filter_size=1,
stride=stride,
act=None,
name=name)
self.shortcut = shortcut
def forward(self, inputs):
conv0 = self.conv0(inputs)
conv1 = self.conv1(conv0)
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
y = fluid.layers.elementwise_add(x=short, y=conv1, act='relu')
return y
class BottleneckBlock(fluid.dygraph.Layer):
expansion = 4
def __init__(self,
num_channels,
num_filters,
stride=1,
shortcut=True,
dilation=1,
padding=None,
name=None):
super(BottleneckBlock, self).__init__(name)
self.conv0 = ConvBNLayer(num_channels=num_channels,
num_filters=num_filters,
filter_size=1,
act='relu')
# name=name)
self.conv1 = ConvBNLayer(num_channels=num_filters,
num_filters=num_filters,
filter_size=3,
stride=stride,
padding=padding,
act='relu',
dilation=dilation)
# name=name)
self.conv2 = ConvBNLayer(num_channels=num_filters,
num_filters=num_filters * 4,
filter_size=1,
stride=1)
# name=name)
if not shortcut:
self.short = ConvBNLayer(num_channels=num_channels,
num_filters=num_filters * 4,
filter_size=1,
stride=stride)
# name=name)
self.shortcut = shortcut
self.num_channel_out = num_filters * 4
def forward(self, inputs):
conv0 = self.conv0(inputs)
#print('conv0 shape=',conv0.shape)
conv1 = self.conv1(conv0)
#print('conv1 shape=', conv1.shape)
conv2 = self.conv2(conv1)
#print('conv2 shape=', conv2.shape)
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
#print('short shape=', short.shape)
y = fluid.layers.elementwise_add(x=short, y=conv2, act='relu')
return y
class ResNet(fluid.dygraph.Layer):
def __init__(self, layers=50, num_classes=1000):
super(ResNet, self).__init__()
self.layers = layers
supported_layers = [18, 34, 50, 101, 152]
assert layers in supported_layers
if layers == 18:
depth = [2, 2, 2, 2]
elif layers == 34:
depth = [3, 4, 6, 3]
elif layers == 50:
depth = [3, 4, 6, 3]
elif layers == 101:
depth = [3, 4, 23, 3]
elif layers == 152:
depth = [3, 8, 36, 3]
if layers < 50:
num_channels = [64, 64, 128, 256]
else:
num_channels = [64, 256, 512, 1024]
num_filters = [64, 128, 256, 512]
self.conv = ConvBNLayer(num_channels=3,
num_filters=64,
filter_size=7,
stride=2,
act='relu')
self.pool2d_max = Pool2D(pool_size=3,
pool_stride=2,
pool_padding=1,
pool_type='max')
if layers < 50:
block = BasicBlock
l1_shortcut=True
else:
block = BottleneckBlock
l1_shortcut=False
self.layer1 = fluid.dygraph.Sequential(
*self.make_layer(block,
num_channels[0],
num_filters[0],
depth[0],
stride=1,
shortcut=l1_shortcut,
name='layer1'))
self.layer2 = fluid.dygraph.Sequential(
*self.make_layer(block,
num_channels[1],
num_filters[1],
depth[1],
stride=2,
name='layer2'))
self.layer3 = fluid.dygraph.Sequential(
*self.make_layer(block,
num_channels[2],
num_filters[2],
depth[2],
stride=1,
name='layer3',
dilation=2))
self.layer4 = fluid.dygraph.Sequential(
*self.make_layer(block,
num_channels[3],
num_filters[3],
depth[3],
stride=1,
name='layer4',
dilation=4))
self.last_pool = Pool2D(pool_size=7, # ignore if global_pooling is True
global_pooling=True,
pool_type='avg')
self.fc = Linear(input_dim=num_filters[-1] * block.expansion,
output_dim=num_classes,
act=None)
self.out_dim = num_filters[-1] * block.expansion
def forward(self, inputs):
x = self.conv(inputs)
x = self.pool2d_max(x)
#print(x.shape)
x = self.layer1(x)
#print(x.shape)
x = self.layer2(x)
#print(x.shape)
x = self.layer3(x)
#print(x.shape)
x = self.layer4(x)
#print(x.shape)
x = self.last_pool(x)
x = fluid.layers.reshape(x, shape=[-1, self.out_dim])
x = self.fc(x)
return x
def make_layer(self, block, num_channels, num_filters, depth, stride, dilation=1, shortcut=False, name=None):
layers = []
if dilation > 1:
padding=dilation
else:
padding=None
layers.append(block(num_channels,
num_filters,
stride=stride,
shortcut=shortcut,
dilation=dilation,
padding=padding,
name=f'{name}.0'))
for i in range(1, depth):
layers.append(block(num_filters * block.expansion,
num_filters,
stride=1,
dilation=dilation,
padding=padding,
name=f'{name}.{i}'))
return layers
def ResNet18(pretrained=False):
model = ResNet(layers=18)
if pretrained:
model_state, _ = fluid.load_dygraph(model_path['ResNet18'])
model.set_dict(model_state)
return model
def ResNet34(pretrained=False):
model = ResNet(layers=34)
if pretrained:
model_state, _ = fluid.load_dygraph(model_path['ResNet34'])
model.set_dict(model_state)
return model
def ResNet50(pretrained=False):
model = ResNet(layers=50)
if pretrained:
model_state, _ = fluid.load_dygraph(model_path['ResNet50'])
model.set_dict(model_state)
return model
def ResNet101(pretrained=False):
model = ResNet(layers=101)
if pretrained:
model_state, _ = fluid.load_dygraph(model_path['ResNet101'])
model.set_dict(model_state)
return model
def ResNet152(pretrained=False):
model = ResNet(layers=152)
if pretrained:
model_state, _ = fluid.load_dygraph(model_path['ResNet152'])
model.set_dict(model_state)
return model
def main():
with fluid.dygraph.guard():
x_data = np.random.rand(2, 3, 512, 512).astype(np.float32)
#x_data = np.random.rand(2, 3, 224, 224).astype(np.float32)
x = to_variable(x_data)
#model = ResNet18()
#model.eval()
#pred = model(x)
#print('resnet18: pred.shape = ', pred.shape)
#model = ResNet34()
#pred = model(x)
#model.eval()
#print('resnet34: pred.shape = ', pred.shape)
model = ResNet50()
model.eval()
pred = model(x)
print('dilated resnet50: pred.shape = ', pred.shape)
#model = ResNet101()
#pred = model(x)
#model.eval()
#print('resnet101: pred.shape = ', pred.shape)
#model = ResNet152()
#pred = model(x)
#model.eval()
#print('resnet152: pred.shape = ', pred.shape)
#print(model.sublayers())
#for name, sub in model.named_sublayers(include_sublayers=True):
# #print(sub.full_name())
# if (len(sub.named_sublayers()))
# print(name)
if __name__ == "__main__":
main()
Unet
import numpy as np
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Layer
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Pool2D
from paddle.fluid.dygraph import Conv2DTranspose
class Encoder(Layer):
def __init__(self, num_channels, num_filters):
super(Encoder, self).__init__()
#TODO: encoder contains:
# 1 3x3conv + 1bn + relu +
# 1 3x3conc + 1bn + relu +
# 1 2x2 pool
# return features before and after pool
self.conv1 = Conv2D(num_channels,
num_filters,
filter_size=3,
stride=1,
padding=1)
self.bn1 = BatchNorm(num_filters,act='relu')
self.conv2 = Conv2D(num_filters,
num_filters,
filter_size=3,
stride=1,
padding=1)
self.bn2 = BatchNorm(num_filters,act='relu')
self.pool = Pool2D(pool_size=2,pool_stride=2,pool_type='max',ceil_mode = True)
def forward(self, inputs):
# TODO: finish inference part
x = self.conv1(inputs)
x = self.bn1(x)
x = self.conv2(x)
x = self.bn2(x)
x_pooled = self.pool(x)
return x, x_pooled
class Decoder(Layer):
def __init__(self, num_channels, num_filters):
super(Decoder, self).__init__()
# TODO: decoder contains:
# 1 2x2 transpose conv (makes feature map 2x larger)
# 1 3x3 conv + 1bn + 1relu +
# 1 3x3 conv + 1bn + 1relu
self.up = Conv2DTranspose(num_channels = num_channels,
num_filters = num_filters,
filter_size = 2,
stride = 2)
self.conv1 = Conv2D(num_channels,
num_filters,
filter_size=3,
stride=1,
padding=1)
self.bn1 = BatchNorm(num_filters,act='relu')
self.conv2 = Conv2D(num_filters,
num_filters,
filter_size=3,
stride=1,
padding=1)
self.bn2 = BatchNorm(num_filters,act='relu')
def forward(self, inputs_prev, inputs):
# TODO: forward contains an Pad2d and Concat
x = self.up(inputs)
h_diff = (inputs_prev.shape[2] - x.shape[2])
w_diff = (inputs_prev.shape[3] - x.shape[3])
x = fluid.layers.pad2d(x,paddings = [h_diff,h_diff - h_diff//2,w_diff,w_diff - w_diff//2])
x = fluid.layers.concat([inputs_prev,x],axis=1)
x = self.conv1(x)
x = self.bn1(x)
x = self.conv2(x)
x = self.bn2(x)
#Pad
return x
class UNet(Layer):
def __init__(self, num_classes=59):
super(UNet, self).__init__()
# encoder: 3->64->128->256->512
# mid: 512->1024->1024
#TODO: 4 encoders, 4 decoders, and mid layers contains 2 1x1conv+bn+relu
self.down1 = Encoder(num_channels=3,num_filters=64)
self.down2 = Encoder(num_channels=64,num_filters=128)
self.down3 = Encoder(num_channels=128,num_filters=256)
self.down4 = Encoder(num_channels=256,num_filters=512)
self.mid_conv1 = Conv2D(512,1024,filter_size=1,padding=0,stride=1)
self.mid_bn1 = BatchNorm(1024,'relu')
self.mid_conv2 = Conv2D(1024,1024,filter_size=1,stride = 1,padding=0)
self.mid_bn2 = BatchNorm(1024,'relu')
#这里通道数是encoder的两倍,因为这里进行了特征图通道叠加
self.up4 = Decoder(1024,512)
self.up3 = Decoder(512,256)
self.up2 = Decoder(256,128)
self.up1 = Decoder(128,64)
self.last_conv = Conv2D(num_channels = 64,num_filters = num_classes,filter_size = 1)
def forward(self, inputs):
x1, x = self.down1(inputs)
print(x1.shape, x.shape)
x2, x = self.down2(x)
print(x2.shape, x.shape)
x3, x = self.down3(x)
print(x3.shape, x.shape)
x4, x = self.down4(x)
print(x4.shape, x.shape)
# middle layers
x = self.mid_conv1(x)
x = self.mid_bn1(x)
x = self.mid_conv2(x)
x = self.mid_bn2(x)
print(x4.shape, x.shape)
x = self.up4(x4, x)
print(x3.shape, x.shape)
x = self.up3(x3, x)
print(x2.shape, x.shape)
x = self.up2(x2, x)
print(x1.shape, x.shape)
x = self.up1(x1, x)
print(x.shape)
x = self.last_conv(x)
return x
def main():
with fluid.dygraph.guard(fluid.CUDAPlace(0)):
model = UNet(num_classes=59)
x_data = np.random.rand(1, 3, 123, 123).astype(np.float32)
inputs = to_variable(x_data)
pred = model(inputs)
print(pred.shape)
if __name__ == "__main__":
main()