学习笔记5(opencv+python 自动求坐标(鸟瞰))
@前面我们用了四边的顶点坐标来进行鸟瞰的操作,这里我们自动采取四边顶点坐标进行鸟瞰操作
老规矩,进行相关函数介绍
1.自动边缘检测函数edgeMap = imutils.auto_canny(gray,sigma=i)
图像平移函数->x平移25,y平移75 translated = imutils.translate(image,25,-75)
2.图像的大小调整imutils.resize(image, width=None, height=None, inter=3)
3.边缘检测(阈值)函数 Canny(image, threshold1, threshold2)
cnts = cv2.findContours(edged1.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)发现轮廓
cnts = imutils.grab_contours(cnts)轮廓引用与findContours()函数搭配使用
4.进行轮廓所围成的面积,并且进行从大到小的排列
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
获取轮廓的周长函数 peri = cv2.arcLength(c, True)
5.用该函数进行图形的相似函数 approx = cv2.approxPolyDP(c, 0.02 * peri, True)
6.进行绘画轮廓函数cv2.drawContours(image, [screenCnt], -1, (0, 255, 255), 2)
image是在该图像绘画,screenCnt是轮廓的坐标点,-1就默认吧,(0,255,0)表示颜色,2表示线粗
实现的步骤
1.图像的输入,并且进行灰度处理
2.边缘检测,发现轮廓,引用轮廓
3.找到最大的轮廓面积,并且进行四边顶点坐标确定
4.进行透视变换(实现鸟瞰操作)
上代码
#相关包
import numpy as np
import cv2
import imutils
import time
import matplotlib.pyplot as plt
from PIL import *
# from tensorflow.keras.preprocessing.image import img_to_array,array_to_img
from skimage.filters import threshold_local
image = cv2.imdecode(np.fromfile(r"E:/学习用的图片素材/明信片.jpg"),-1)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
ratio = image.shape[0] / 500
# print("ratio:",ratio)
orig = image.copy()
#调整图像的大小
image = imutils.resize(image,height=500)
print("改变之后的image:",image.shape)
#对图像进行灰度图处理,然后在进行高斯模糊滤波处理(去除非椒盐噪声)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
plt.imshow(gray)
gray = cv2.GaussianBlur(gray, (3,3), 0)
print("gray.shape:",gray.shape)
# it=time.time()
# for i in range(256):
# for j in range(i+1):
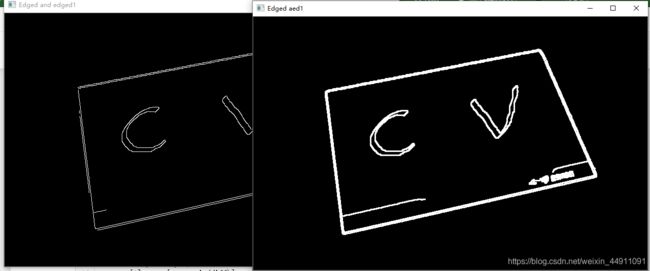
#进行边缘处理,一种是阈值处理,一种是自动边缘处理
edged1 = imutils.auto_canny(gray,sigma=3)
edged = cv2.Canny(gray,170, 200)
edged1 = cv2.dilate(edged1, None)
cv2.imshow("Edged and edged1",edged)
cv2.imshow("Edged aed1",edged1)
cv2.imshow("edged and edged1",np.hstack([edged,edged1]))
cv2.waitKey(0)
cv2.destroyAllWindows()
#这里的操作和上个学习笔记4的一样,不做介绍
def order_points(pts):
#进行初始化点的位置,左上、右上、左下、右下
rect = np.zeros((4, 2), dtype = "float32")
#采取四个点的x+y的和,以最小的和为左上的点,x+y最大为右下的点
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
#定义一左下点和右上点的位置,用|x-y|表示,小的为右上,大的为左下
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
# obtain a consistent order of the points and unpack them
# individually
rect = order_points(pts)
(tl, tr, br, bl) = rect
#重新计算新的图像的宽度和高度
widthA = np.sqrt(np.sum((br - bl) ** 2))
widthB = np.sqrt(np.sum((tr - tl) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(np.sum((tr - br) ** 2))
heightB = np.sqrt(np.sum((tl - bl) ** 2))
maxHeight = max(int(heightA), int(heightB))
#重新定义新的图像的四边顶点的坐标
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# 计算透视矩阵,并且变化应用
M = cv2.getPerspectiveTransform(rect, dst)
print(M)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
return warped
下面这里是主要的部分,发现轮廓进行轮廓的应用,在按照轮廓的面积进行大到小排序(这样的作法是为了减少计算量)因为我的操作主要是外围四边的轮廓并求出顶点坐标。
用len(approx)==4是为了得到四个顶点的坐标
#发现轮廓,并且用imutils.grab_contours()函数返回轮廓
cnts = cv2.findContours(edged1.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
print(cnts)
#这一步是进行轮廓所围成的面积,并且进行从大到小的排列
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
for c in cnts:
#获取轮廓的周长
peri = cv2.arcLength(c, True)
#用该函数进行图形的相似
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
#如果我们相似的轮廓是四个点表示的,那么我们就可以看作这是轮廓点就是我们所要的
if len(approx) == 4:
screenCnt = approx
break
print(screenCnt)
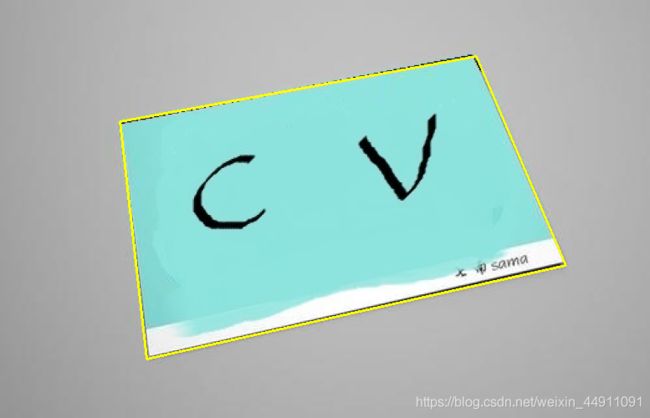
#画出轮廓
cv2.drawContours(image, [screenCnt], -1, (0, 255, 255), 2)
cv2.imshow("Outline", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
最后鸟瞰实现
#进行透视转换
warped = four_point_transform(orig, screenCnt.reshape(4, 2)*ratio)
#把彩色图像进行灰度处理,然后对其进行黑白化处理
warped = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
#将灰度图像变成黑白纸的形式
T = threshold_local(warped, 11, offset = 9, method = "gaussian")
warped = (warped > T).astype("uint8") * 255
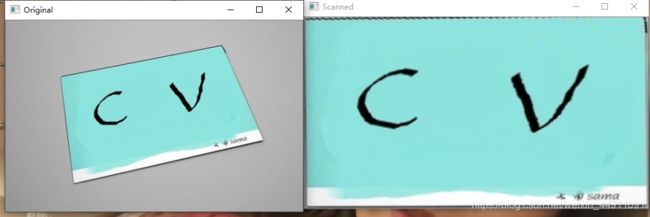
cv2.imshow("Original", imutils.resize(orig, height = 500))
cv2.imshow("Scanned", imutils.resize(warped, height = 500))
#cv2.imshow("and",np.hstack([cv2.cvtColor(orig,cv2.COLOR_BGR2GRAY),warped]))
cv2.waitKey(0)