高翔视觉SLAM14讲学习笔记-第7讲
高翔视觉SLAM14讲学习笔记-第7讲
- 特征点法
-
- ORB特征
- 实践:特征提取和匹配
特征点法
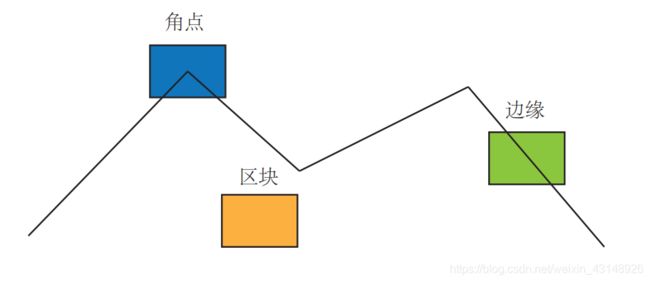
特征点:就是图像中有代表性的点,图像中一些特别的地方,如角点(角点就是角的点)、边缘、区块等。
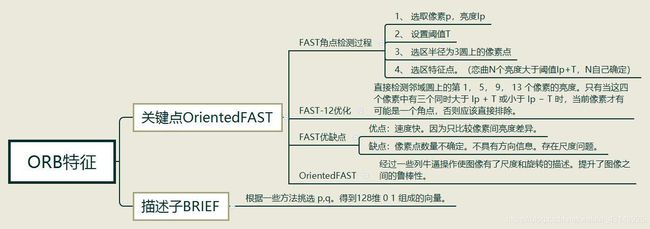
ORB特征
实践:特征提取和匹配
暴力匹配运算量大,程序中使用的是快速最邻近算法(FLANN)。
/*
if ( argc != 3 )
{
cout<<"usage: feature_extraction img1 img2"<//-- 初始化
std::vector keypoints_1, keypoints_2;
//定义两个Vector容器,存放KeyPoint类型。
// 准备存放两张图中的特征点的。
Mat descriptors_1, descriptors_2;
Ptr detector = ORB::create();
Ptr descriptor = ORB::create();
// Ptr detector = FeatureDetector::create(detector_name);
// Ptr descriptor = DescriptorExtractor::create(descriptor_name);
Ptr matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );
// 三个智能指针。智能指针:会主动释放内存,防止内存泄漏。
第一步,detect函数
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect ( img_1,keypoints_1 );
detector->detect ( img_2,keypoints_2 );
// detect函数,分析像素,将特征点存于容器keypoints中。两个参数,输入和输出,第三个参数先不管。
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute ( img_1, keypoints_1, descriptors_1 );
descriptor->compute ( img_2, keypoints_2, descriptors_2 );
//compute函数:对Keypoint中的每个像素点进行描述子的计算。存于Mat类中的descriptor中。
// 通过cout<Mat outimg1;
drawKeypoints( img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
imshow("ORB特征点",outimg1);
// DrawKeypoint函数 新定义一个Mat类变量,将特征点img_1画出来并存为一个新图像进行展示。调用了drawKeypoint函数
// 使用默认值将img_1于keypoint_1中存储的特征点进行圈画。
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector matches;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match ( descriptors_1, descriptors_2, matches );
定义容器,类型为cv::DMatch。 DMatch类型变量用来存储特征点之间的匹配情况,每个变量有四个成员对图像内的索引,分别是所选中的特征点所对应的keypoint容器中对应的标号。Distance代表特征点之间的距离,使用汉明距离。距离越小越好。
使用match函数将descriptors 1,2 进行相似度匹配,存于matches容器中。
这儿就声明了两个double类型的数。
//-- 第四步:匹配点对筛选
double min_dist=10000, max_dist=0;
基本语法比较好理解。遍历所有的匹配点,并找出最小距离和最大距离。存到刚才的两个double类型函数中。
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
std::vector< DMatch > good_matches;
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( matches[i].distance <= max ( 2*min_dist, 30.0 ) )
{
good_matches.push_back ( matches[i] );
}
}
//-- 第五步:绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, matches, img_match );
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch );
drawMatches函数,对两张图片之间的特征点匹配对进行连线与拼接。 将两张图拼接成一张图,存入Mat类型的img_match中。
imshow ( "所有匹配点对", img_match );
imshow ( "优化后匹配点对", img_goodmatch );
waitKey(0);
我是初学者,错误肯定很多,请大家指正。谢谢啦