Jetson Nano目标检测手把手实战教程(pytorch训练、tensorrt推理,含完整代码和数据)
目录
一、概述
1.1 深度学习和边缘计算
1.2 Jetson Nano简介
二、深度学习环境安装
2.1 Pytorch框架
2.2 在Jetson Nano上安装Pytorch
三、算法原理
四、具体实现步骤
4.1 工程代码和环境准备
4.2 模型训练和推理
4.2.1数据集准备
4.2.2训练
4.2.3模型转换
4.2.4 实时推理
五、总结
参考文献:
一、概述
1.1 深度学习和边缘计算
2012年AlexNet模型在ImageNet数据集上取得了巨大成功,从此,深度学习技术开始进入黄金发展期。随后,深度学习在多个应用领域均大幅提升了性能指标,尤其在计算机视觉领域,超越SVM等一众传统机器学习方法。然而,深度学习的高准确性是以深度学习对计算和内存的高需求为代价的。由于输入数据可能具有很高的维数,并且需要对输入数据执行数百万次计算,因此训练和推理一个深度学习模型对空间和计算需求都很高。高准确性和高资源消耗是深度学习的特点。
为了满足深度学习的计算需求,一种常见的方法是利用云计算。要使用云资源,必须将数据从网络边缘的数据源推送上云然后再在云上进行推理。这种将数据从源迁移到云的解决方案带来了几个问题:延迟大、服务器负荷重、隐私性弱。面对这3个棘手的问题,越来越多的研究学者和商业公司将目标瞄向边缘计算场景。
所谓边缘计算,简单来理解就是赋能传统终端设备(安卓、ios、嵌入式设备等)以深度学习推理能力,直接在前端就完成深度学习推理,而不需要将图像等数据通过web传至总服务器再处理,这样能极大的减少后端服务器压力。从深度学习的训练和推理角度来理解,目前的边缘计算更多的是指利用终端设备执行深度学习推理,而不是训练。整个训练还是采用高性能图形服务器来执行,训练完后得到模型参数,然后再部署到终端执行推理。
采用边缘计算设备,既能够利用深度学习弥补传统算法精度不高的问题,同时能够满足众多工业应用场景实时性、便捷性、小型独立性的需求。因此,边缘计算成为了现如今的主流研究方向。
1.2 Jetson Nano简介
Jetson Nano是一款体积小巧、功能强大的人工智能嵌入式开发板,于2019年3月由英伟达推出,搭载英伟达研发的128核Maxwell GPU,可以快速将AI技术落地并应用于多种边缘计算场景。其官网地址为:https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-nano/。
下面详细列举一些Jetson Nano的优势:
(1) 体型小巧,性能强大,价格实惠。
(2) 专为AI而设计,搭载128核Maxwell GPU,可为机器人终端、工业视觉终端带来足够的AI算力。
(3) 可提供472 GFLOP,支持高分辨率传感器,可以并行处理多个传感器。
(4) 支持英伟达的CUDA,cuDNN和TensorRT软件库。
(5) 支持一系列流行的AI框架和算法,比如TensorFlow,PyTorch,Caffe / Caffe2,Keras,MXNet等,使得开发人员能够简单快速的将AI模型和框架集成到产品中,轻松实现图像识别,目标检测,姿势估计,语义分割,视频增强和智能分析等强大功能。
一般桌面PC或服务器级别的显卡(如英伟达1080Ti等)价格非常昂贵,不适合边缘计算需求,而且体积也过于庞大。因此,英伟达推出的这款嵌入式人工智能开发板Jetson Nano非常契合当前行业需求。最近,英伟达又推出了2G版本的jetson nano,售价只需要49美元(400元人民币左右),使得边缘计算开发成本大幅下降了。相信,未来深度学习赋能的嵌入式开发板会成为工业界的主流。
本文重点讲解如何利用Jetson Nano开发板来开发深度学习应用。关于Jetson Nano的更多介绍和基本使用方法请参考我的另一篇博客:https://blog.csdn.net/qianbin3200896/article/details/103760640,这篇文章里已经完整的讲解了Jetson Nano的基本使用方法,请不熟悉Jetson Nano的读者先阅读并且安装基本的开发环境,例如code-oss等,本文对这些内容不再重复讲解。
二、深度学习环境安装
2.1 Pytorch框架
很多教程仅仅简单的介绍如何在Jetson Nano中根据预先下载好的深度学习权重文件进行推理,例如SSD-lite等,但是这些教程没有完整的讲解如何通过训练得到这个权重?如何按照我们自己的任务需求来改造模型、训练模型?
本教程采用目前最受欢迎的Pytorch框架来实现模型训练和推理。当然,对于训练任务来说,目前更多的是采用台式电脑实现(带高端GPU显卡),这样训练速度会更快。而对于推理部分来说,就采用Jetson Nano来实现。之所以采用Pytorch是因为其实现简单,并且方便改动,同时它的动态图机制非常适合调试。另外,针对Pytorch的开源项目目前最多,基本每个应用领域都可以找到有效的开源代码,这为我们在jetson nano上开发各种应用提供了先天条件。基本上来说,只要完整的跑通一个模型(包括训练、推理、部署),后面其他的算法都可以采用这种方式实现终端AI应用开发(当然,因为资源受限,很多重量级模型均需要轻量化优化才能在Jetson Nano上运行)。
因为本教程面向pytorch,因此,需要读者有一定的pytorch基础,不熟悉pytorch框架的读者可以先自行学习pytorch。
2.2 在Jetson Nano上安装Pytorch
为了能够顺利的安装pytorch,建议使用英伟达官网推荐的方法安装指定版本的pytorch:https://forums.developer.nvidia.com/t/pytorch-for-jetson-nano-version-1-6-0-now-available/72048。该网址已经提供预先编译好的各版本二进制whl安装包:
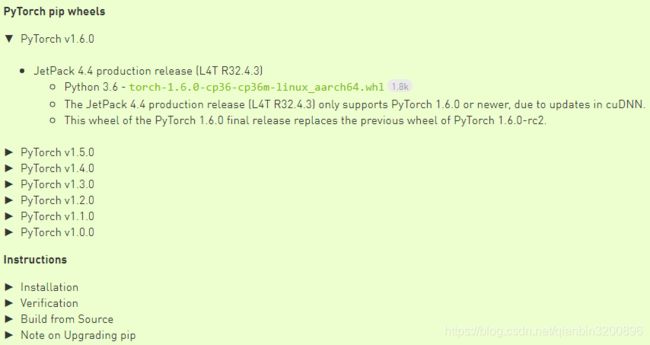
本教程选择当前最新的Pytorch1.6.0版本。复制对应的链接地址,然后按照官方教程下载再安装,具体命令如下:
wget https://nvidia.box.com/shared/static/9eptse6jyly1ggt9axbja2yrmj6pbarc.whl -O https://nvidia.box.com/shared/static/9eptse6jyly1ggt9axbja2yrmj6pbarc.whl
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
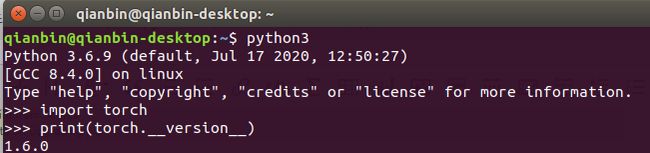
pip3 install numpy torch-1.6.0-cp36-cp36m-linux_aarch64.whl在下载whl包时可能由于网络的原因暂时下载不了,这里可以先在普通的windows电脑上用迅雷将该whl文件下载下来,再拷贝到jetson nano中进行安装。安装完成后验证下pytorch是否安装成功:
接下来再安装torchvision,根官网介绍,pytorch1.6吻合的torch版本为0.7.0
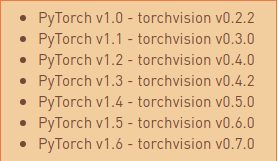
因此,我们通过下面的命令下载和安装torch v0.7.0:
sudo apt-get install libjpeg-dev zlib1g-dev
git clone --branch v0.7.0 https://github.com/pytorch/vision torchvision
cd torchvision
export BUILD_VERSION=0.7.0
sudo python3 setup.py install 最后验证下安装是否成功:

三、算法原理
目标检测,顾名思义,就是将图像中的感兴趣目标检测出来,这里的“检测出来”一般是指用矩形框框出目标,并给出目标所属的类型。也就是说我们既要知道感兴趣区域在图像中的具体坐标位置,同时还需要知道感兴趣区域到底是什么东西。例如在实际场景中,我们想做一个水果分拣机,那么我们就需要安装一个摄像头,然后逐帧的捕获图像,再对图像进行检测,检测图像中是否有需要分拣的水果,同时给出这个水果的类型(例如苹果自动分拣到1号流水线、橘子分拣到2号流水线等等),再调用机械设备进行分拣动作。所有这些的核心是高精度的目标检测算法作支撑。对水果作目标检测如下图所示:
考虑到Jetson Nano计算性能有限,因此,我们必须选择轻量级的目标检测算法。本文按照英伟达官方教程选择ssd-mobilenet算法来实现。
在基于“Proposal + Classification”的目标检测方法中,R-CNN 系列(R-CNN、 SPPnet、 Fast R-CNN以及 Faster R-CNN等)取得了非常好的结果,但是在速度方面离实时效果还比较远。在提高 mAP (Mean Average Precision) 的同时兼顾速度,逐渐成为神经网络目标检测领域未来的趋势。YOLO检测算法不仅能够达到实时的效果,而且mAP与前面面提到的 RCNN系列相比有很大的提升。 但是YOLO 有一些缺陷:每个网格只能预测一个物体,容易造成漏检;且对于物体的尺度相对比较敏感,面对尺度变化较大的物体时泛化能力较差。针对YOLO 中的这些不足,SSD(Single Shot MultiBox Detector)网络在这两方面都有所改进,同时兼顾了 mAP 和实时性的要求。
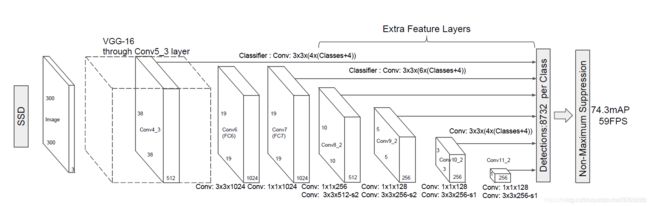
上图是ssd算法的模型结构图,具体的算法步骤如下:
1、输入一幅图片(300x300),将其输入到预训练好的分类网络中来获得不同大小的特征映射,修改传统的VGG16网络;
2、抽取Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2、Conv11_2层的feature map,然后分别在这些feature map层上面的每一个点构造6个不同尺度大小的bbox,然后分别进行检测和分类,生成多个bbox,如下图所示;
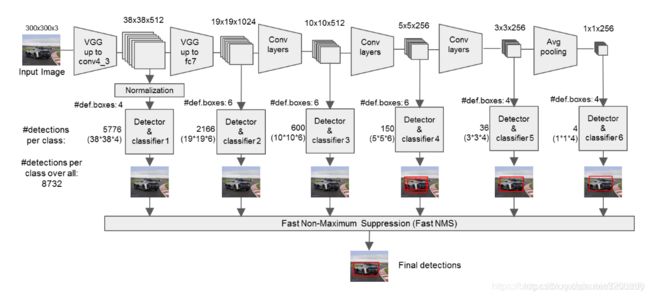
3、将不同feature map获得的bbox结合起来,经过NMS(非极大值抑制)方法来抑制掉一部分重叠或者不正确的bbox,生成最终的bbox集合(即检测结果);
为了进一步加速,nvidia给出的ssd官方例子使用mobilenet来实现优化。在原来的cnn卷积中通过使用深度可分离卷积来加速和优化,关于深度可分离卷积的原理可以参考我的另一篇博客。
总结:SSD中的Defalut box和Faster-rcnn中的anchor机制很相似。就是预设一些目标预选框,后续通过softmax分类+bounding box regression获得真实目标的位置。对于不同尺度的feature map 上使用不同大小的Default boxes。具体可以仔细参考官方代码细细品读。
四、具体实现步骤
接下来我们按照官方教程给出Jetson Nano上目标检测推理的完整步骤。这里需要采用Nvidia给出的推理库:jetson-inference ,这个库包含图像分类、检测、语义分割等模块,更加重要的是这个库实现了完整的pytorch模型到英伟达tensorrt模型的转换以及如何应用tensorrt优化器调用GPU进行高速推理。
4.1 工程代码和环境准备
我们使用Jetson Nano预装的Python3.6。首先确保Jetson Nano上已经装了最新版的JetPack 4.4(安装镜像时可以选择),里面已经装好了cuda、cudnn和TensorRT7.1,同时按照前面的步骤安装好Pytorch1.6.0。注意上述版本的一致性,尤其是TensorRT,如果用了低版本的TensorRT,那么在加载ONNX模型的时候会出问题。
环境安装好以后就可以下载工程代码:
git config --global http.postBuffer 524288000
git clone --recursive https://github.com/dusty-nv/jetson-inference.git然后进入该工程:
cd jetson-inference建立build文件夹:
mkdir build进入build文件夹并编译:
cd build
cmake ../
make -j$(nproc)编译过程中需要下载一些预训练模型,会有提示选择框。实际下载过程中由于网路原因可能下载不成功,所以我们这里不下载任何模型。后期如果需要这些预训练模型,可以打开tools/download-models.sh文件,然后找到相关模型的下载路径,在windows电脑上科学上网下载下来后再拷贝到jetson-inference/data/networks中。

安装过程中把*都勾掉,一个都不要选。然后按回车确认即可。接下来会询问是否安装pytorch,这里跳过这个步骤。
编译完成后进行安装:
sudo make install
sudo ldconfig安装完以后进行测试:
如果没有错误则说明安装成功。
4.2 模型训练和推理
一般情况下,完整的开发和部署流程为:
(1)在GPU服务器上使用pytorch训练模型得到pth模型文件;
(2) 将pth模型转化为onnx格式文件;
(3) 在jetson nano上利用tensorrt加载onnx模型,实现快速推理;
完整的ssd-mobilenet代码位于下载工程的jetson-inference/python/training/detection/ssd目录下,因此,先切换到该目录:
cd jetson-inference/python/training/detection/ssd然后安装必要的依赖环境:
pip3 install -v -r requirements.txt4.2.1数据集准备
本小节我们使用Open Images数据集来进行讲解。该数据集包含600种物体类,在当前ssd工程下面提供了一个脚本文件open_images_downloader.py,使用该文件可以下载需要的数据类图片。这里由于我们想要训练一个水果目标检测器,因此,选择如下8种水果图片:
Apple,Orange,Banana,Strawberry,Grape,Pear,Pineapple,Watermelon
苹果, 橘子, 香蕉, 草莓, 葡萄, 梨, 菠萝, 西瓜具体的,运行下述命令进行下载:
python3 open_images_downloader.py --class-names "Apple,Orange,Banana,Strawberry,Grape,Pear,Pineapple,Watermelon" --data=data/fruit最终数据会被下载到当前data目录下面。如果想要下载其它的类,可以参考种类列表。以上8类水果图片一共是6360张,含27188个检测框。
最后,我们下载一个预训练模型:
wget https://nvidia.box.com/shared/static/djf5w54rjvpqocsiztzaandq1m3avr7c.pth -O models/mobilenet-v1-ssd-mp-0_675.pth这个预训练模型是提前在PASCAL VOC数据集上训练得到的ssd-mobilenet模型,使用这个预训练模型可以加速我们后面的模型收敛速度,同时可以在一定程度上提升后续任务的精度,这也是典型的迁移学习方法。通过这种迁移学习,即使后面我们的数据集规模不大,也能取得不错的检测精度。
4.2.2训练
运行下面的命令即可开始训练:
python3 train_ssd.py --data=data/fruit --model-dir=models/fruit --batch-size=4 --epochs=30其中参数batch-size可以根据实际的显卡设备性能来调整。如果在jetson nano上训练,那么batch-size可以设置为4。如果训练过程中出现死机现象,说明是jetson nano的显卡内存不够了,可以尝试交换内存并且关闭图形界面来训练。对于Open Images数据集,在Jetson Nano上训练,当batch-size设置为4时,1个epoch需要将近17分钟的时间。(说明:一般情况下不推荐使用jetson nano来进行训练,因为这个终端设备的GPU性能不高,有条件的话还是选择高端的显卡加上高端的主机来进行训练,而jetson nano只用来推理)。
训练完成后训练好的模型位于models/fruit目录下面,这里直接给出训练好的模型的下载地址:https://nvidia.box.com/shared/static/gq0zlf0g2r258g3ldabl9o7vch18cxmi.gz
4.2.3模型转换
下载后的模型为pth文件,该文件是pytorch可认的深度学习参数文件,但是对于其它框架它并不可认,因此,需要将它转成一种其它深度学习框架通用的onnx格式。这里可能会有个疑问,为什么要转换文件呢,直接在jetson nano上通过pytorch进行推理就可以了。答案当然是可以的,但是这样做不好,至少在jetson nano这款终端设备上这样处理并不是最优的。因为我们通过pytorch训练出来的模型在底层是没有优化过的,直接在jetson nano上跑速度慢、显卡利用率低。为了能够最优的使用英伟达的显卡,英伟达针对深度学习的常用底层算子(例如卷积等),英伟达推出了TensorRT优化器。
TensorRT是一个高性能的深度学习推理(Inference)优化器,可以为深度学习应用提供低延迟、高吞吐率的部署推理。TensorRT可用于对超大规模数据中心、嵌入式平台或自动驾驶平台进行推理加速。TensorRT现已能支持TensorFlow、Caffe、Mxnet、Pytorch等几乎所有的深度学习框架,将TensorRT和NVIDIA的GPU结合起来,能在几乎所有的框架中进行快速和高效的部署推理。
因此,模型转换的目的就是为了能够利用英伟达的这个tensorrt优化器进行推理加速。之前有人评测过,使用tensorrt后平均单张图片推理速度可以加速3倍以上,因此,掌握这个优化推理工具是非常重要的。
具体的,我们使用下面的命令来转换模型:
python3 onnx_export.py --model-dir=models/fruit最终会生成一个名为ssd-mobilenet.onnx的参数文件,位于jetson-inference/python/training/detection/ssd/models/fruit目录下面。
注意,在模型转换的时候要在同目录下准备一个labels.txt文件,用来指明所有物体类:
BACKGROUND
Apple
Banana
Grape
Orange
Pear
Pineapple
Strawberry
Watermelon其中第一个BACKGROUND即为背景类,这里也必须要将其作为1类来处理。
4.2.4 实时推理
我们采用USB免驱高清摄像头进行图像实时采集和推理。具体命令如下:
detectnet --model=models/fruit/ssd-mobilenet.onnx --labels=models/fruit/labels.txt \
--input-blob=input_0 --output-cvg=scores --output-bbox=boxes \
/dev/video0第一次运行时由于需要将onnx转换为tensorrt的模型,因此,需要一定的转换时间。最终效果如下图所示:
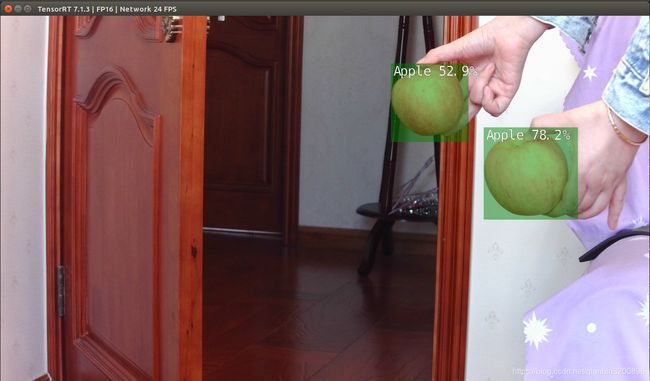
可以看到成功的将手里的两个苹果认了出来,并且推理速度达到了24FPS,这为后面的性能优化提供了很大的改进空间,我们完全可以采用更复杂的模型来提高精度,然后降低一点实时性。
重要提示:执行AI相关操作时,一定要给Jetson Nano加装风扇来散热!!!同时Jetson Nano要采用外置适配器供电方式(最好配3A输出的电源)。
五、总结
本文详细讲解了如何在jetson nano上进行目标检测,具体包括算法原理介绍、模型训练、转换、部署,相信这篇博文能够给各位读者一定的启发。
最后,给自己刚上市的一本书打个软广:《Python Web开发从入门到实战》Django+Bootstrap,清华大学出版社出版,京东、淘宝、当当都可以买到,这本书比较注重实战,想要学习Python Web(Django)的朋友可以关注和支持一下。
完整的代码和数据集我放到百度网盘上(读者也可以自行在英伟达官方网站上下载):
链接: https://pan.baidu.com/s/18sLaQX4AfWh_yc5tsLrPGw 提取码: te3a
后记:关于模型原理部分本来想写仔细点、结合代码来写的,但是由于最近在忙着写一篇论文没时间弄了,后续等有机会再完善吧。
参考文献:
【1】英伟达官方教程:https://github.com/dusty-nv/jetson-inference
【2】Liu W, Anguelov D, Erhan D, et al. SSD: Single Shot MultiBox Detector[C]. european conference on computer vision, 2016: 21-37.
【3】He K, Zhang X, Ren S, et al. Deep Residual Learning for Image Recognition[C]. computer vision and pattern recognition, 2016: 770-778.
【4】Sandler M, Howard A, Zhu M, et al. MobileNetV2: Inverted Residuals and Linear Bottlenecks[C]. computer vision and pattern recognition, 2018: 4510-4520.