图的最短路径
- 迪杰斯特拉算法
- 贝尔曼-福特算法
- 弗洛伊德算法
- SPFA算法(中国西南交通大学段凡丁发明)
最短路径问题分为两类,一大类是求一个顶点到其余各顶点的最短路径问题,另一大类是求各个顶点间最短路径问题。
迪杰斯特拉
迪杰斯特拉算法就是求解一个点到其余各点的最短路径算法,无向图带权图和有向带权图都适用。缺点是不适用权值为负数的图(后面会讲解原因)
算法步骤
- 初始的点为起点,我们用s集合存储已经确定最短路径的点的集合,那么s={v},起点加入。其余各个点到v点的权值存储在dis数组里,不是直接连接的点距离都是无穷大
- 从dis数组选出一个顶点u,这个点u到v点距离最小,把u加入s集合表示u已经确定了最短路径
- 以点u为中介点,将除了s集合存储的点以外的其余点逐个判断,如果某个点x存在dis[u]+u点到x点距离
- 重复2,3步骤,直到s集合包含了所有点。
我们还是直接上图看完整流程
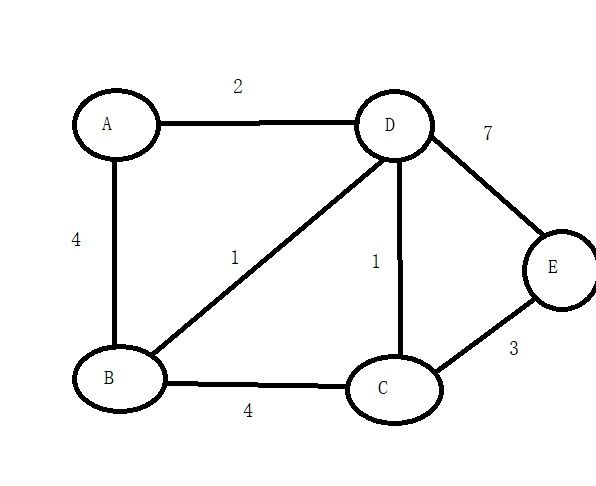
首先我们先准备几个辅助数组,我们假设从点A为起点,找其它点到点A的最短路径
| 节点 | A | B | C | D | E |
|---|---|---|---|---|---|
| 下标 | 0 | 1 | 2 | 3 | 4 |
| 权重 | 0 | 4 | ∞ | 2 | ∞ |
| 标记 | 1 | 0 | 0 | 0 | 0 |
| 前驱 | -1 | 0 | -1 | 0 | -1 |
我来说明下,这几个数组的作用
权重数组存储每个点到A点的最短距离
前驱数组存储的是每个点前驱点下标,例如B点前驱是0,表示B和A连接,前驱是A
标记数组存储的是当前点是否已经找到了最短路径。
接下来我们准备工作做好了,开始干活了!
1.按照算法步骤,找出没被标记点中权重最小的点,我们找到了D点,将D点标记为1,表示D点以确认最短路径,然后以D点为中介判断未标记点,首先来到了B点,权重数组中B对应的是4,根据算法步骤3,我们计算出权重数组D+BD距离2+1=3 < 4(4就是权重数组B的值)所以B当前有一条路径比之前近,所以修改了B点对应的权重为3,同时更新它的前驱是D的下标。意思就是经过D点到B,更加近。同理继续看下一个未被标记的点C,继续计算权重数组D+CD距离 2+1=3 <∞,拿C点也要修改权重为3,同时更新C点前驱是D,继续看下一个未被标记点E,发现权重数组D+DE=9<∞,所以也修改E点权重为9,同步更新它的前驱是D。如下表就是第一次更新后的结果
| 节点 | A | B | C | D | E |
|---|---|---|---|---|---|
| 下标 | 0 | 1 | 2 | 3 | 4 |
| 权重 | 0 | 3 | 3 | 2 | 9 |
| 标记 | 1 | 0 | 0 | 1 | 0 |
| 前驱 | -1 | 3 | 3 | 0 | 3 |
2.找出当前表中未标记点权重最小的,来到了B点和C点,我们选择B(随便哪一个都行)将B标记为1,接着逐个判断未被标记点,首先是C,权重数组B+BC距离 3+4 >3所以不修改。又来到了E,权重数组B+BE 3+∞ >9 ,也不修改,如下表就是第二次更新的结果
| 节点 | A | B | C | D | E |
|---|---|---|---|---|---|
| 下标 | 0 | 1 | 2 | 3 | 4 |
| 权重 | 0 | 3 | 3 | 2 | 9 |
| 标记 | 1 | 1 | 0 | 1 | 0 |
| 前驱 | -1 | 3 | 3 | 0 | 3 |
3.找出当前表中未被标价点权重最小的是C点,将C点标记为1,然后判断未被标记的,只剩E点,权重数组C+CE距离 3+3<9 所以修改E点权重是6,更行E点前驱是C的下标,如下表就是第三次更新的结果
| 节点 | A | B | C | D | E |
|---|---|---|---|---|---|
| 下标 | 0 | 1 | 2 | 3 | 4 |
| 权重 | 0 | 3 | 3 | 2 | 6 |
| 标记 | 1 | 1 | 1 | 1 | 0 |
| 前驱 | -1 | 3 | 3 | 0 | 2 |
4.找出最小,只剩下E点,直接标记E点是1,结束。
| 节点 | A | B | C | D | E |
|---|---|---|---|---|---|
| 下标 | 0 | 1 | 2 | 3 | 4 |
| 权重 | 0 | 3 | 3 | 2 | 6 |
| 标记 | 1 | 1 | 1 | 1 | 1 |
| 前驱 | -1 | 3 | 3 | 0 | 2 |
有了上面一张表,我们就可以求出每个点到A点的最短路径了,我举两个点例子。
首先是点B,根据前驱下标进行寻找,B前驱下标是3,对应点D,所以B点前驱是D,接着D点前驱下标是0,对应点A,接着A点前驱下标是-1,退出。所以整个逆序路径就是B-D-A
接着看E点,前驱下标是2就是C点,C点前驱是3是D点,D点前驱下标是0,是A点,A点前驱是-1,退出,整个逆序路径是E-C-D-A
//迪杰斯特拉算法
void Dijkstra(struct MGraph *g, char obj)
{
int *temp, *dis, *pre,index,min,k;
temp = (int*)malloc(sizeof(int) * g->numVretexes);
dis = (int*)malloc(sizeof(int) * g->numVretexes);
pre = (int*)malloc(sizeof(int) * g->numVretexes);
//找出源节点的位置
for (int i = 0; i < g->numVretexes; i++)
{
if (g->vetex[i] == obj)
{
index = i;
break;
}
}
//初始化辅助数组
for (int i = 0; i < g->numVretexes; i++)
{
temp[i] = 0;
pre[i] = -1;
dis[i] = g->data[index][i];
}
temp[index] = 1;
for (int i = 1; i < g->numVretexes; i++)
{
min = MAX;
//找出当前dis存储最小的下标
for (int j = 0; j < g->numVretexes; j++)
{
if (temp[j] == 0 && g->data[index][j] < min)
{
min = g->data[index][j];
k = j;//标记最小值的位置
}
}
temp[k] = 1;
index = k;
//从该点开始,逐个判断并修改dis数组
for (int j = 0; j < g->numVretexes; j++)
{
if (temp[j] == 0 && (g->data[k][j] + dis[k]) < dis[j])
{
dis[j] = g->data[k][j] + dis[k];
pre[j] = k;
}
}
}
//dis数组就是源点到各个点的最短路径
for (int i = 0; i < g->numVretexes;i++)
{
printf("%c-->%c(%d)\n", obj, g->vetex[i], dis[i]);
}
printf("\n");
}
贝尔曼-福特
首先我们在这里回答下,为什么迪杰斯特拉算法不可以计算带负权的图。我们直接举例子分析吧
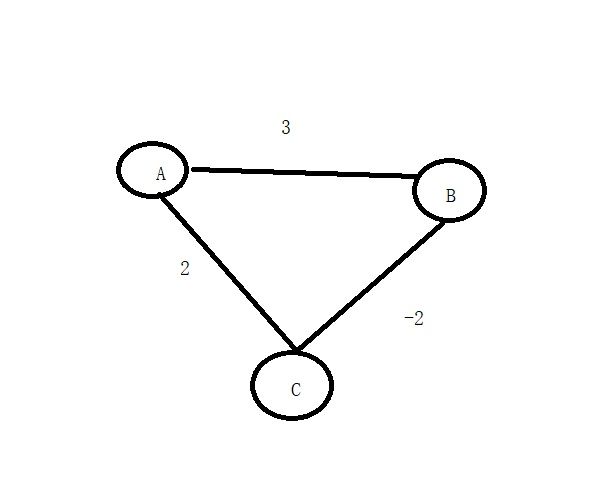
看这个图,存在带负权的边,现在我们按照迪杰斯特拉算法去求解A点到其它点的最短路径问题。
| 节点信息 | A | B | C |
|---|---|---|---|
| 下标 | 0 | 1 | 2 |
| 权重 | 0 | 3 | 2 |
| 前驱 | -1 | 0 | 0 |
| 标记 | 1 | 0 | 0 |
首先选出权重最小的是点C,标记点C是1,然后判断未被标记点D 权重数组C+CB距离<权重数组B,所以修改点B对应的权重是0,且更行它的前驱是2.接着只剩下点B,标记它,完成。最终的表如下
| 节点信息 | A | B | C |
|---|---|---|---|
| 下标 | 0 | 1 | 2 |
| 权重 | 0 | 0 | 2 |
| 前驱 | -1 | 2 | 0 |
| 标记 | 1 | 1 | 1 |
根据表发现,A点到C点的最短距离是2,可是我们一眼可以发现,从A到B再到C的距离是1,所以迪杰斯特拉不成立啊。什么原因?仔细看迪杰斯特拉算法的特性。它每次都找出当前权重数组最小的,找到后,就确认了这个点已经是最近的。可是如果后面其他边可能会存在负数边,会让这个点距离目标点更近。讲的有点绕,大家还是看图分析吧。
贝尔曼-福特求解思路
为了能够求解带又负值的单原最短路径问题,贝尔曼-福特从原点逐次绕过其它点,通过松弛操作以达到缩短终点的最短路径方法。
什么是松弛操作?我举个例子,假设权重数组A存储的是3,权重数组B存储的是10,而点A到B有一条边距离是2,那么你说是不是应该修改权重数组B存储的值了,先到达A点,再到达点B的距离仅仅是3+2=5,表示路过B到达A,比直接到A的路径短,修改A的权重是5。
- 我们准备两个数组,一个是path数组,就是前驱数组,存储路径的,另一个就是dis数组,存储权重.将它们初始化,path数组全部初始化为-1,dis数组全部初始为无穷大,并初始化原点的dis为0
- 因为有n个点,所以最多有n-1条边,所以需要执行n-1次循环,每次循环都对每条边进行松弛的判断。
总结下,就是对于图的每条边,将每个点进行边的松弛判断,条件成立,修改dis数组
void Bellman_Ford(struct MGraph *g, char obj)
{
int *dis, *pre,index,temp;
dis = (int*)malloc(sizeof(int) *g->numVretexes);
pre = (int*)malloc(sizeof(int) * g->numVretexes);
//找出目标点位置
for (int i = 0; i < g->numVretexes; i++)
{
if (g->vetex[i] == obj) {
index = i;
break;
}
}
//初始化dis数组
for (int i = 0; i < g->numVretexes; i++)
{
dis[i] = MAX;
pre[i] = -1;
}
dis[index] = 0;
for (int k = 1; k < g->numVretexes; k++)
{
for (int i = 0; i < g->numVretexes; i++)
{
for (int j = 0; j < g->numVretexes; j++)
{
if (j != index && i != j && g->data[i][j] != MAX)
{
if (dis[i] + g->data[i][j] < dis[j])
{
dis[j] = dis[i] + g->data[i][j];
pre[j] = i;
}
}
}
}
}
//经过松弛后,如果还可以松弛,表示图中存在负数权回路
temp = 0;
for (int i = 0; i < g->numVretexes; i++)
{
for (int j = 0; j < g->numVretexes; j++)
{
if (j != index && i != j && g->data[i][j] != MAX)
{
if (dis[i] + g->data[i][j] < dis[j])
{
temp = 1;
printf_s("图中存在负权回路\n");
return;
}
}
}
}
//输出dis数组
for (int i = 0; i < g->numVretexes; i++)
{
printf_s("%d ", dis[i]);
}
}
SPFA算法
SPFA算法是中国老师段丁凡老师发明的,用于求单源最短路径问题的负权值问题。不过不久被国际某某组织认定其论文的证明是错误的,我猜测可能段大神,算法是牛逼的,可能在证明自己算法疏忽了细节,不过这个并不会影响我们对段老师的倾佩。此算法的核心就是利用队列去无限的逼近最优解,算法的主题和广度优先遍历算法大体一样,不同于广度优先遍历,出队顶点时,这个点还有可能再次入队。
吐槽下,我按照算法思路写出两类代码(网上算法步骤分为两派)去和网上大佬们对比,发现网上各种代码的百分之99都是存在严重问题的,因为,它们对于这个SPFA的约束问题没搞清楚。也可能是老师当年没完善吧,假设图中无负权回路,SPFA算法在求解带负权的无向图是不成立的,在求解带负权的有向图是正确的。这个当时我电脑测试了自己的一个版本,当时还不行,又进行了手绘图测试,发现带负权的无向图还是有BUG。大家有空可以测试下。希望大佬指点。
算法描述
- 初始化队列,将源点入队列。设置辅助数组dis初始化为无穷大,数组temp初始化为0,数组path初始化为-1,其中dis数组存储源点到其它点的距离,temp数组存储对应点是否在队列里,path数组存储对应到源点的最短路径。(path和迪杰斯特拉的path原理一样),设置源点下标对应的dis值为0(自己到自己的距离是0),设置源点下标对应的temp值为1(源点在队列里)
- 出队一个点point,设置该点在temp数组的值是0(代表该点出队列),遍历其它所有点i,凡是存在(dis[i]>dis[point]+point到i的距离),就修改点i的在dis数组的值是dis[point]+point到i的值,并将该点入队列,更新temp数组的i的值为1.更新path数组对用i的值是point(代表该点的前驱点是point)
- 循环执行步骤2,直到队列为空。
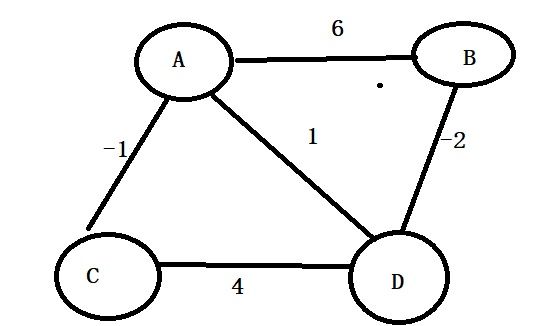
举例分析整个过程,我们假设A是源点(起点)

1.初始化队列,dis数组,temp数组,path数组,让源点A入队列,修改A的temp是1,A的dis值是0,此时的数组情况和队列情况如下图
| 顶点信息 | A | B | C | D |
|---|---|---|---|---|
| 顶点下标 | 0 | 1 | 2 | 3 |
| dis数组 | 0 | ∞ | ∞ | ∞ |
| temp数组 | 1 | 0 | 0 | 0 |
| path数组 | -1 | -1 | -1 | -1 |
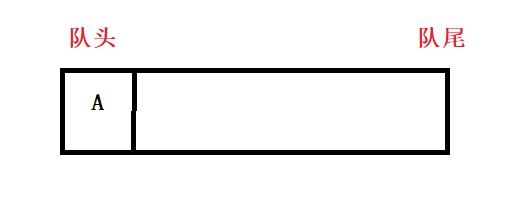
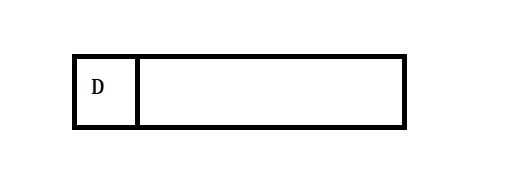
2.出队列队头A,更新temp[0]=0(出队),并逐个与其它点判断(松弛操作),首先是B,发现dis[1]>dis[0]+AB的距离,(此处的dis[1]和dis[0]对应的就是点B,点A,我们用顶点下标代替点)所以修改dis[1] = dis[0]+AB = 6,入队点B,更新temp[1] = 1,path[1] = 0,接着是点C,发现dis[2]>dis[0]+AC,于是修改dis[2] = dis[0]+AC=-1,入队点C,更新path[2] = 0,temp[2] = 1,最后来到了点D,发现dis[3] 3.出队队头B,更新temp[1] = 0,逐个判断与其它点,首先是A,dis[0] 4.出队队头C,更新temp[2]=0,逐个点判断,首先是A,dis[0] 5.出队队头D,更新temp[3]=0,逐个点判断,首先A是源点,dis[0] 此时的数组就是点A到其它点的最短距离和最短路径了。path数组存储的时路径,看查看方式和迪杰斯特拉一样,我们举一个例子。AD的最短距离,我们查看dis数组dis[3] = 3。 代码 弗洛伊德算法是求图中每个顶点之间的最短路径算法,它的思想是利用动态规划去得到问题的解。理解起来就是对图中所有两个顶点对,依次采取松弛操作,找到最优解。 算法描述 看下面的图,我们来分析下 1.初始化dis和path数组 2.图中所有顶点对有(0,1)(1,0)(0,2)(2,0)(0,3)(3,0)(1,2)(2,1)(1,3)(3,1)(2,3)(3,2)对于以上每一个顶点对,对经过点0(A)的松弛判断,根据状态转移方程进行修改dis和path的值。首先(0,1)顶点对中间点是0的松弛判断,dis[0][1]=dis[0][0]+dis[0][1],所以状态方程不成立。因为此图是无向图,所以(0,1)(1,0)顶点对判断一个就行了。接着(0,2)中间点还是0,dis[0][2]=dis[0][0]+dis[0][2]还是不成立。接着(0,3)此时dis[0][3]=dis[0][0]+dis[0][3]还是不成立,接着(1,2)发现dis[1][2]>dis[1][0]+dis[0][2];所以设置dis[1][2]=dis[1][0]+dis[0][2]=5,并更新path[1][2] =0;并同步更新(2,1)的dis数组和path数组。接着来到(1,3),dis[1][3] 3.接下来还是顶点对(0,1)(1,0)(0,2)(2,0)(0,3)(3,0)(1,2)(2,1)(1,3)(3,1)(2,3)(3,2),对于每一个顶点对经过点1(B)的松弛判断 4.经过点2(C)的松弛判断 5.经过点3(D)的松弛判断 此时dis数组和path数组全部更新完毕,现在dis数组存储的是两个点之间的最短距离,path数组对应的就是两个点间的路径过程。这个path查看路径是个递归的过程。 核心代码 我分别用C,C++,JAVA三种主流语言编写了完整代码,请大家指导批正,一起学习。 点击查看
顶点信息
A
B
C
D
顶点下标
0
1
2
3
dis数组
0
6
-1
∞
temp数组
0
1
1
0
path数组
-1
0
0
-1

顶点信息
A
B
C
D
顶点下标
0
1
2
3
dis数组
0
6
-1
4
temp数组
0
0
1
1
path数组
-1
0
0
1

顶点信息
A
B
C
D
顶点下标
0
1
2
3
dis数组
0
6
-1
3
temp数组
0
0
0
1
path数组
-1
0
0
2
顶点信息
A
B
C
D
顶点下标
0
1
2
3
dis数组
0
6
-1
3
temp数组
0
0
0
0
path数组
-1
0
0
2
AD的最短路径是path[3]=2,中间点是2,path[2]=0,中间点是0,path[0]=-1,没点了。
所以AD的最短路径就是A-C-Dvoid SPFA(struct MGraph *g, char obj)
{
int index,i,*queue,*visit,*dis,*path,front,rear,top;
queue = (int*)malloc(sizeof(int)*100);//防止队列溢出(此处的队列非循环队列)
visit = (int*)malloc(sizeof(int)*g->numVretexes);
dis = (int*)malloc(sizeof(int)*g->numVretexes);
path = (int*)malloc(sizeof(int)*g->numVretexes);
//1.找出源点
for (i = 0; i < g->numVretexes; i++)
{
if (g->vetex[i] == obj)
{
index = i;
}
}
//2:初始化队列,辅助数组
for (i = 0; i < g->numVretexes; i++)
{
visit[i] = 0;
dis[i] = MAX;
path[i] = -1;
}
front = rear = 0;
queue[rear++] = index;
visit[index] = 1;
dis[index] = 0;
while (rear != front)//队列空结束
{
top = queue[front++];
visit[top] = 0;
for (i = 0; i < g->numVretexes; i++)
{
if (i != top)
{
if (dis[i] > (dis[top] + g->data[top][i]))
{
dis[i] = dis[top] + g->data[top][i];
path[i] = top;
if (visit[i] == 0)//没在队列里,入队
{
queue[rear++] = i;
visit[i] = 1;
}
}
}
}
}
//输出最端距离和路径
for (i = 0; i < g->numVretexes; i++)
{
if (i != index)
{
printf_s("%c-->%c(%d)\n", g->vetex[index], g->vetex[i], dis[i]);
}
}
}
弗洛伊德算法
状态转移方程 如果dis[u][v]>dis[u][w]+dis[w][v]成立
则:dis[u][v]=dis[u][w]+dis[w][v],,,,,path[u][v] = path[u][w]
dis
0
1
2
3
0
0
6
-1
1
1
6
0
∞
-2
2
-1
∞
0
4
3
1
-2
4
0
path
0
1
2
3
0
-1
-1
-1
-1
1
-1
-1
-1
-1
2
-1
-1
-1
-1
3
-1
-1
-1
-1
dis
0
1
2
3
0
0
6
-1
1
1
6
0
5
-2
2
-1
5
0
0
3
1
-2
0
0
path
0
1
2
3
0
-1
-1
-1
-1
1
-1
-1
0
-1
2
-1
0
-1
0
3
-1
-1
0
-1
dis
0
1
2
3
0
0
6
-1
1
1
6
0
5
-2
2
-1
5
0
0
3
1
-2
0
0
path
0
1
2
3
0
-1
-1
-1
-1
1
-1
-1
0
-1
2
-1
0
-1
0
3
-1
-1
0
-1
dis
0
1
2
3
0
0
4
-1
-1
1
4
0
5
-2
2
-1
5
0
0
3
-1
-2
0
0
path
0
1
2
3
0
-1
2
-1
2
1
2
-1
0
-1
2
-1
0
-1
0
3
2
-1
0
-1
dis
0
1
2
3
0
0
-3
-1
-1
1
-3
0
-2
-2
2
-1
-2
0
0
3
-1
-2
0
0
path
0
1
2
3
0
-1
3
-1
2
1
3
-1
3
-1
2
-1
3
-1
0
3
2
-1
0
-1
//Floyd算法
void Floyd(struct MGraph *g)
{
int i, j, k,temp=0;
int **dis, **path;
dis = (int**)malloc(sizeof(int*) * g->numVretexes);
path = (int**)malloc(sizeof(int*) * g->numVretexes);
for (i = 0; i < g->numVretexes; i++)
{
dis[i] = (int*)malloc(sizeof(int) *g->numVretexes);
path[i] = (int*)malloc(sizeof(int) *g->numVretexes);
}
//初始化dis和path数组
for (i = 0; i < g->numVretexes; i++)
{
for (j = 0; j < g->numVretexes; j++)
{
dis[i][j] = g->data[i][j];
path[i][j] = -1;
}
}
//开始逐个点p的判断
for (i = 0; i < g->numVretexes; i++)
{
//逐个取出每两个点x,y,判断dis[x][y] > dis[x][p]+dis[p][y]
for (j = 0; j < g->numVretexes; j++)
{
for (k = 0; k < g->numVretexes; k++)
{
if (dis[j][k] > dis[j][i] + dis[i][k])
{
dis[j][k] = dis[j][i] + dis[i][k];
path[j][k] = i;
}
}
}
}
//输出最短距离
for (i = 0; i < g->numVretexes; i++)
{
for (j = 0; j < g->numVretexes; j++)
{
if (i != j)
{
//printf_s("%c-->%c(%d)", g->vetex[i], g->vetex[j], dis[i][j]);
print_Path(i, j, g, path);
printf("%d\n", dis[i][j]);
}
}
}
}
获取完整代码