sklearn机器学习:逻辑回归LogisticRegression参数解析之梯度下降
梯度下降:重要参数max_iter
在上篇博文《sklearn机器学习:逻辑回归LogisticRegression参数解析之penalty & C》中,我们解析了参数penalty & C,本文重点讨论max_iter。
逻辑回归的目的是求解能够让模型最优化、拟合程度最好的参数ω的值,即求解能够让损失函数J(ω)最小化的ω值。
对于二元逻辑回归,有多种方法可以用来求解参数ω,最常见的有梯度下降法(Gradient Descent),坐标下降法(Coordinate Descent),牛顿法(Newton-Raphson method)等,其中又以梯度下降法最为著名。每种方法都涉及复杂的数学原理,但这些计算在执行的任务其实是类似的。
梯度下降求解逻辑回归
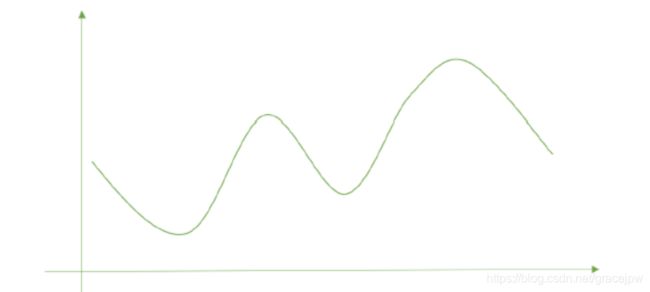
以最著名也最常用的梯度下降法为例,来看逻辑回归的参数求解过程。观察下面的图像,这个图像的横坐标是参数,纵坐标是损失函数J(ω),最简化的情况下,只有一个特征对应只有一个参数。现在求解损失函数值最小化时的ω解,执行过程如下:
- 首先在图像上随机投掷一个小球,让小球向着损失函数最低的点去滚动
- 由于没有重力,所以需要告诉小球三件事,才能够让小球滚动起来:
(1) 滚动的方向:必须是损失函数的值下降最快的方向
(2) 每次滚动的距离
(3) 要滚动的次数

然而真正的损失函数可能会长这样:
现在有一个带两个特征并且没有截距的逻辑回归y(x1,x2),两个特征所对应的参数分别为(ω1,ω2)。下面这个华丽的平面就是损失函数J(ω1,ω2)在以ω1、ω2和J为坐标轴的三维立体坐标系上的图像。现在,寻求的是损失函数的最小值,也就是图像的最低点。
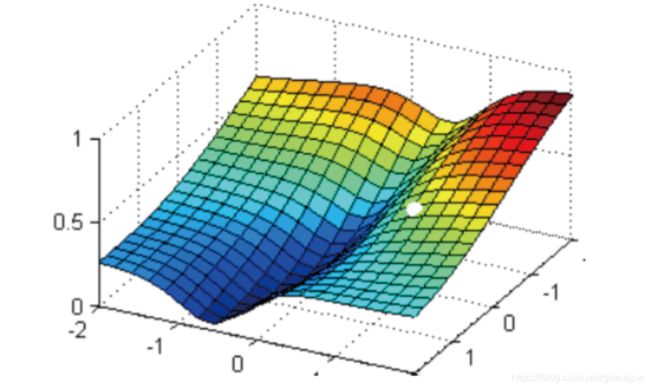
在这个图像上随机放一个小球,松手,这个小球就会顺着这个华丽的平面滚落,直到滚到深蓝色的区域——损失函数的最低点。同样,为了严格监控这个小球的行为,让小球每次滚动的距离有限,不让他一次性滚到最低点,并且最多只允许它滚动100步,还要记下它每次滚动的方向,直到它滚到图像上的最低点。
可以看到,小球高处滑落,在深蓝色的区域中来回震荡,最终停留在了图像凹陷处的某个点上。可以观察到几个现象:
首先,小球并不是一开始就直向着最低点去的,它先一口气冲到了蓝色区域边缘,后来又折回来,已经规定了小球是多次滚动,所以可见,小球每次滚动的方向都是不同的。
另外,小球在进入深蓝色区域后,并没有直接找到某个点,而是在深蓝色区域中来回震荡了了数次才停下。这有两种可能:1) 小球已经滚到了了图像的最低点,所以停下了,2) 由于设定的步数限制,小球还没有找到最低点,但也只好在100步的时候停下了。也就是说,小球不一定滚到了图像的最低处。
但无论如何,小球停下的是我们在现有状况下可以获得的唯一点。如果够幸运,这个点就是图像的最低点,那只要找到这个点的对应坐标( ω 1 ∗ , ω 2 ∗ , J m i n \omega_1^*,\omega_2^*,J_{min} ω1∗,ω2∗,Jmin),就可以获取能够让损失函数最小的参数取值 [ ω 1 ∗ , ω 2 ∗ ] [\omega_1^*,\omega_2^*] [ω1∗,ω2∗]。如此,梯度下降的过程就已经完成。
在此过程中,小球其实就是一组组的坐标点(ω1,ω2,J);小球每次滚动的方向就是那一个坐标点的梯度向量方向,因为每滚动一步,小球所在的位置都发生变化,坐标点和坐标点对应的梯度向量都发生变化,所以每次滚动的方向也都不一样;人为设置的100次滚动限制,就是sklearn中逻辑回归的参数max_iter,代表着能走的最大步数,即最大迭代次数。每次滚动的距离限制,由“步长“决定,在sklearn中是被提前定义好的,人为不可控。
所以梯度下降,其实就是在众多可能的值中遍历,一次次求解坐标点的梯度向量,不断让损失函数的取值逐渐逼近最小值,再返回这个最小值对应的参数取值 [ ω 1 ∗ , ω 2 ∗ ] [\omega_1^*,\omega_2^*] [ω1∗,ω2∗]的过程。
梯度下降
在多元函数上对各个自变量量求∂偏导数,把求得的各个自变量量的偏导数以向量的形式写出来,就是梯度。比如损失函数J(ω1,ω2),其自变量是逻辑回归预测函数yω(x)的参数ω1,ω2,在损失函数上对ω1,ω2求偏导数,求得的梯度向量d就是 [ ∂ J ∂ ω 1 , ∂ J ∂ ω 2 ] T [\frac{\partial{J}}{\partial{\omega_1}},\frac{\partial{J}}{\partial{\omega_2}}]^T [∂ω1∂J,∂ω2∂J]T,简称grad J(ω1,ω2)或者 ∇ J ( ω 1 , ω 2 ) \nabla{J(ω_1,ω_2)} ∇J(ω1,ω2)。在ω1,ω2和J的取值构成的坐标系上,点 ( ω 1 ∗ , ω 2 ∗ , J ) (ω_1^*,ω_2^*,J) (ω1∗,ω2∗,J)具体的梯度向量就是 [ ∂ J ∂ ω 1 ∗ , ∂ J ∂ ω 2 ∗ ] T [\frac{\partial{J}}{\partial{\omega_1}^*},\frac{\partial{J}}{\partial{\omega_2}^*}]^T [∂ω1∗∂J,∂ω2∗∂J]T,或者 ∇ J ( ω 1 ∗ , ω 2 ∗ ) \nabla{J(ω_1^*,ω_2^*)} ∇J(ω1∗,ω2∗)。如果是3个参数的梯度向量量,就是 [ ∂ J ∂ ω 1 , ∂ J ∂ ω 2 , ∂ J ∂ ω 3 ] T [\frac{\partial{J}}{\partial{\omega_1}},\frac{\partial{J}}{\partial{\omega_2}},\frac{\partial{J}}{\partial{\omega_3}}]^T [∂ω1∂J,∂ω2∂J,∂ω3∂J]T,以此类推。
到底在哪个函数上,求什么的偏导数?
有些讲解梯度向量的定义的句子,比如“对多元函数的参数求∂偏导数,把求得的各个参数的偏导数以向量的形式写出来,就是梯度”。这种解释一眼看上去没错,却不太严谨。
一个多元函数的梯度,是对其自变量求偏导的结果,不是对其参数求偏导的结果。但是在逻辑回归的数学过程中,损失函数的自变量量刚好是逻辑回归的预测函数y(x)的参数,所以才造成了这种让人误解的“对多元函数的参数求偏导”的写法。务必记住,正确的做法是:在多元函数(损失函数)上对自变量量(逻辑回归的预测函数y(x)的参数)求偏导,求解梯度的方式,和逻辑回归本身的预测函数y(x)没有丝毫关系。
以及,以f(x)作为例子,解释说梯度向量是(∂f/∂x,∂f/∂y)T。这种举例方式又
会造成误解:“ x是逻辑回归中的特征呀,所以梯度向量是对模型的特征,即x求偏导数”。这个例子,其实是对多元函数的自变量求偏导数,并不是代表在逻辑回归中要对特征求偏导数。
求解梯度,是在损失函数上对损失函数J(ω1,ω2)自身的自变量ω1,ω2求偏导,而这两个自变量,刚好是逻辑回归的预测函数 y ( x ) = 1 1 + e − ω T x y(x)=\frac1{1+e^{-\omega^Tx}} y(x)=1+e−ωTx1的参数。
梯度是什么?梯度是一个向量,因此它有大小也有方向。它的大小,就是偏导数组成的向量的大小,又叫做向量的模,记作d。它的方向,几何上说,就是损失函数J(ω)的值增加最快的方向,就是小球每次滚动的方向的反方向。只要沿着梯度向量的反方向移动坐标,损失函数J(ω)的取值就会减少得最快,也就最容易找到损失函数的最小值。
在逻辑回归中,损失函数如下所示:

对这个函数的自变量ω求偏导,就可以得到梯度向量在第j组ω的坐标点上的表示形式:

在这个公式下,只要给定一组ω的取值,再带入特征矩阵x,就可以求得这一组ω取值下的预测结果yω(xi),结合真实标签向量y,就可以获得这一组ωj取值下的梯度向量,其大小表示为dj。
我们的目的是在可能的ω取值上进行遍历,一次次计算梯度向量,并在梯度向量的反方向上让损失函数J下降至最小值。在这个过程中,ω和梯度向量的大小d都会不断改变,而遍历过程可以描述为:

其中ωj+i是第j次迭代后的参数向量,ωj是第j次迭代后的参数向量,α被称为步长,控制着每走一步(每迭代一次)后ω的变化,并以此来影响每次迭代后的梯度向量的大小和方向。
步长
步长到底是什么?
有些资料中,步长被描述为”梯度下降中每一步沿梯度的反方向前进的长度“,”沿着最陡峭最易下山的位置走的那一步的长度“或者”梯度下降中每一步损失函数减小的量“,甚至有说,步长是二维平面著名的求导三角形中的”斜边“或者“对边”的。这些说法都是错误的。
来看下面这张二维平面的求导三角型图。类比到损失函数和梯度概念上,图中的抛物线就是损失函数J(ω),A(ωa,J(ωa))就是小球最初在的位置,B(ωb,J(ωb))就是一次滚动后小球移动到的位置。从A到B的方向就是梯度向量的反方向,指向损失函数在A点下降最快的方向。而梯度向量的大小是点A在图像上对ω求导后的结果,也是点A切线方向的斜率,橙色角的tan结果,记作d。
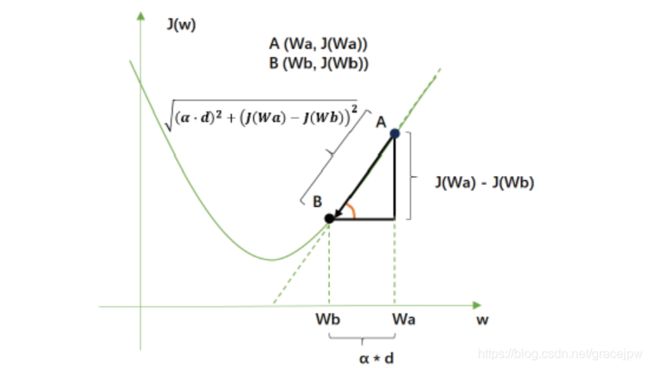
梯度下降每走一步,损失函数减小的量,是损失函数在ω变化之后的取值变化,写作J(ωb)-J(ωa),这是二维平面的求导三角型中的“对边”。
梯度下降每走一步,参数向量的变化,写作ωa-ωb,根据我们参数向量的迭代公式,就是"步长x梯度向量"的大小,记作 α ∗ d α*d α∗d ,这是二维平面的求倒三角形中的“邻边”。
梯度下降中每走一步,下降的距离,是 ( α ∗ d ) 2 + ( J ( ω b ) − J ( ω a ) ) 2 \sqrt{(α*d)^2+(J(ω_b)-J(ω_a))^2} (α∗d)2+(J(ωb)−J(ωa))2,是对边和邻边的根号下平方和,是二维平面的求导三角型中的”斜边“。
所以,步长不是任何物理距离,它甚至不是梯度下降过程中任何距离的直接变化,它是梯度向量的大小d上的一个比例,影响着参数向量每次迭代后改变的部分。
不难发现,既然参数迭代是靠梯度向量的大小d * 步长α来实现的,而J(ω)的降低又是靠调节ω来实现的,所以步长可以调节损失函数下降的速率。在损失函数降低的方向上,步长越长,ω的变动就越大。
相对的,步长如果很短,ω的每次变动就很小。具体地说,如果步长太大,损失函数下降得就非常快,需要的迭代次数就很少,但梯度下降过程可能跳过损失函数的最低点,无法获取最优值。而步长太小,虽然函数会逐渐逼近我们需要的最低点,但迭代的速度却很缓慢,迭代次数就需要很多。
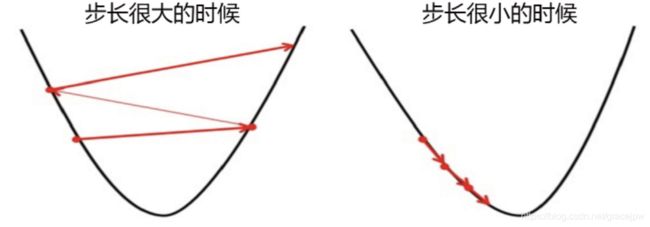
看小球运动时注意到,小球在进入深蓝色区域后,并没有直接找到某个点,而是在深蓝色区域中来回震荡了数次才停下,这种”震荡“其实就是因为我们设置的步长太大的缘故。但是在开始梯度下降之前,我们并不知道什么样的步长才合适,但梯度下降一定要在某个时候停止才可以,否则模型可能会无限地迭代下去。因此,sklearn中,设置参数max_iter最大迭代次数来代替步长,帮助我们控制模型的迭代速度并适时地让模型停下。max_iter越大,代表步长越小,模型迭代时间越长,反之,则代表步长设置很大,模型迭代时间很短。
迭代结束,获取到J(ω)的最小值后,我们就可以找出这个最小值对应的参数向量ω,逻辑回归的预测函数也就可以根据这个参数向量ω来建立了。
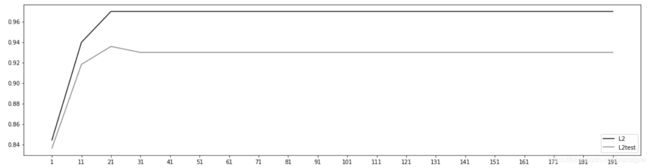
来看看乳腺癌数据集下,max_iter的学习曲线:
#乳腺癌数据集下,max_iter的学习曲线
l2 = []
l2test = []
Xtrain, Xtest, Ytrain, Ytest = train_test_split(X,y,test_size=0.3,random_state=420)
for i in np.arange(1,201,10):
lrl2 = LR(penalty="l2",solver="liblinear",C=0.9,max_iter=i)
lrl2 = lrl2.fit(Xtrain,Ytrain)
l2.append(accuracy_score(lrl2.predict(Xtrain),Ytrain))
l2test.append(accuracy_score(lrl2.predict(Xtest),Ytest))
graph = [l2,l2test]
color = ["black","gray"]
label = ["L2","L2test"]
plt.figure(figsize=(20,5))
for i in range(len(graph)):
plt.plot(np.arange(1,201,10),graph[i],color[i],label=label[i])
plt.legend(loc=4)
plt.xticks(np.arange(1,201,10))
plt.show()
#可以使用属性.n_iter_来调用本次求解中真正实现的迭代次数
lr = LR(penalty="l2",solver="liblinear",C=0.9,max_iter=300).fit(Xtrain,Ytrain)
lr.n_iter_
array([25], dtype=int32)