【吴恩达机器学习笔记】8聚类、降维
13聚类(Clustering)
13.1 无监督学习简介(Unsupervised Learning Introduction)
在一个典型的监督学习中,有一个有标签的训练集,目标是找到能够区分正样本和负样本的决策边界,在这里的监督学习中,有一系列标签,需要据此拟合一个假设函数。与此不同的是,在非监督学习中,数据没有附带任何标签。训练集可以写成只有 x ( 1 ) x^{(1)} x(1), x ( 2 ) x^{(2)} x(2)……一直到 x ( m ) x^{(m)} x(m)。没有任何标签 y y y。数据一般看起来可以分成几个分开的点集(称为簇),一个能够找到圈出的这些点集的算法,就被称为聚类算法。
聚类算法应用:
13.2 K-均值算法( K-Means Algorithm)
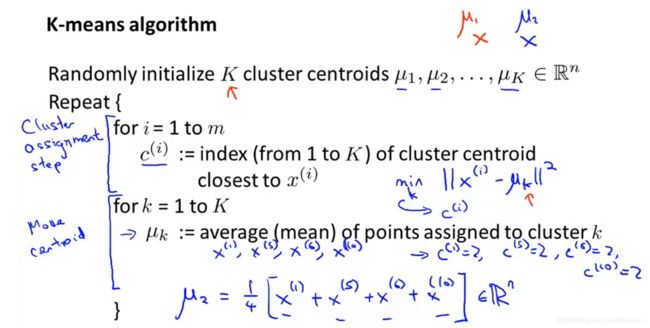
K-均值是最普及的聚类算法,算法接受一个未标记的数据集,然后将数据聚类成不同的组。K-均值是一个迭代算法,假设想要将数据聚类成n个组,其方法为:
- 首先选择 K K K个随机的点,称为聚类中心(cluster centroids);
- 对于数据集中的每一个数据,按照距离 K K K个中心点的距离,将其与距离最近的中心点关联起来,与同一个中心点关联的所有点聚成一类。
- 计算每一个组的平均值,将该组所关联的中心点移动到平均值的位置。
- 重复上述步骤直至中心点不再变化。
用 μ 1 μ^1 μ1, μ 2 μ^2 μ2,…, μ k μ^k μk 来表示聚类中心,用 c ( 1 ) c^{(1)} c(1), c ( 2 ) c^{(2)} c(2),…, c ( m ) c^{(m)} c(m)来存储与第 i i i个实例数据最近的聚类中心的索引,K-均值算法的伪代码如下:
Repeat {
for i = 1 to m
c(i) := index (form 1 to K) of cluster centroid closest to x(i)
for k = 1 to K
μk := average (mean) of points assigned to cluster k
}
算法分为两个步骤
- for循环是赋值步骤,即:对于每一个样例 i i i,计算其应该属于的类。
- for循环是聚类中心的移动,即:对于每一个类 K K K,重新计算该类的质心。
K-均值算法可以很便利地用于将数据分为许多不同组,即使在没有非常明显区分的组群的情况下也可以。
13.3 优化目标(Optimization Objective)
K-均值最小化问题,是要最小化所有的数据点与其所关联的聚类中心点之间的距离之和,因此K-均值的代价函数(又称畸变函数 Distortion function)为:
J ( c ( 1 ) , . . . , c ( m ) , μ 1 , . . . , μ K ) = 1 m ∑ i = 1 m ∥ X ( i ) − μ c ( i ) ∥ 2 J(c^{(1)},...,c^{(m)},μ_1,...,μ_K)=\dfrac {1}{m}\sum^{m}_{i=1}\left\| X^{\left( i\right) }-\mu_{c^{(i)}}\right\| ^{2} J(c(1),...,c(m),μ1,...,μK)=m1i=1∑m∥∥∥X(i)−μc(i)∥∥∥2
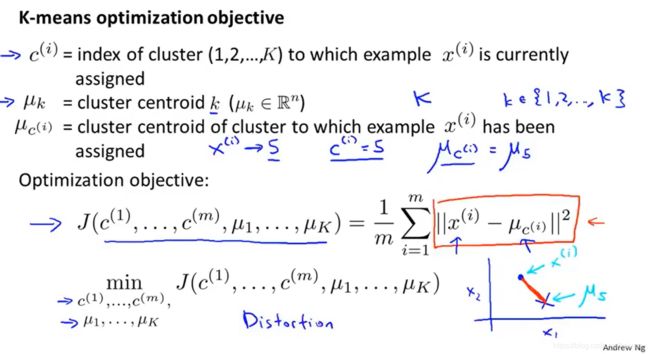
K-均值迭代算法第一个循环是用于减小 c ( i ) c^{(i)} c(i)引起的代价,而第二个循环则是用于减小 μ i { {\mu }_{i}} μi引起的代价。迭代的过程一定会是每一次迭代都在减小代价函数,不然便是出现了错误。
13.4 随机初始化(Random Initialization)
在运行K-均值算法的之前,首先要随机初始化所有的聚类中心点,步骤如下:
- 我们应该选择 K < m K
K<m ,即聚类中心点的个数要小于所有训练集实例的数量 - 随机选择 K K K个训练实例,然后令 K K K个聚类中心分别与这 K K K个训练实例相等
K-均值的一个问题在于,它有可能会停留在一个局部最小值处,而这取决于初始化的情况。为了解决这个问题,通常需要多次运行K-均值算法,每一次都重新进行随机初始化,最后再比较多次运行K-均值的结果,选择代价函数最小的结果。这种方法在 K K K较小的时候(2-10)还是可行的,但如果 K K K较大,也可能不会有明显地改善。
13.5 选择聚类数(Choosing the Number of Clusters)
没有所谓最好的选择聚类数的方法,通常是需要根据不同的问题,人工进行选择的。有一个选择聚类数目的方法是肘部法则。肘部法则需要做的是改变 K K K值,也就是聚类类别数目的总数。用一个聚类来运行K均值聚类方法。这意味着所有的数据都会分到一个聚类里,然后计算成本函数或者计算畸变函数 J J J。 K K K代表聚类数字。
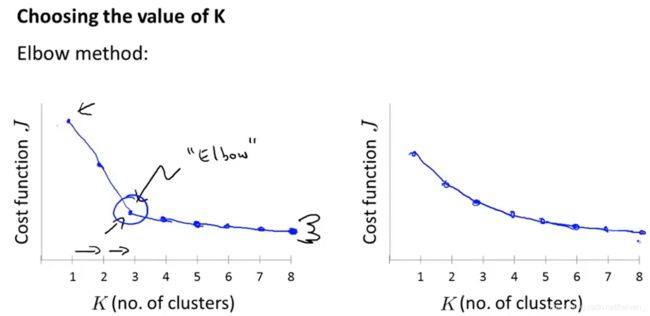
“肘部法则”的畸变值会迅速下降,从1到2,从2到3之后,会在3的时候达到一个肘点。在此之后,畸变值就下降的非常慢,看起来就像使用3个聚类来进行聚类是正确的,这是因为那个点是曲线的肘点,畸变值下降得很快, K = 3 K=3 K=3之后就下降得很慢,那么就选 K = 3 K=3 K=3。
聚类参考资料:
1.相似度/距离计算方法总结
(1). 闵可夫斯基距离Minkowski/(其中欧式距离: p = 2 p=2 p=2)
d i s t ( X , Y ) = ( ∑ i = 1 n ∣ x i − y i ∣ p ) 1 p dist(X,Y)={ {\left( { {\sum\limits_{i=1}^{n}{\left| { {x}_{i}}-{ {y}_{i}} \right|}}^{p}} \right)}^{\frac{1}{p}}} dist(X,Y)=(i=1∑n∣xi−yi∣p)p1
(2). 杰卡德相似系数(Jaccard):
J ( A , B ) = ∣ A ∩ B ∣ ∣ A ∪ B ∣ J(A,B)=\frac{\left| A\cap B \right|}{\left|A\cup B \right|} J(A,B)=∣A∪B∣∣A∩B∣
(3). 余弦相似度(cosine similarity):
n n n维向量 x x x和 y y y的夹角记做 θ \theta θ,根据余弦定理,其余弦值为:
c o s ( θ ) = x T y ∣ x ∣ ⋅ ∣ y ∣ = ∑ i = 1 n x i y i ∑ i = 1 n x i 2 ∑ i = 1 n y i 2 cos (\theta )=\frac{ { {x}^{T}}y}{\left|x \right|\cdot \left| y \right|}=\frac{\sum\limits_{i=1}^{n}{ { {x}_{i}}{ {y}_{i}}}}{\sqrt{\sum\limits_{i=1}^{n}{ { {x}_{i}}^{2}}}\sqrt{\sum\limits_{i=1}^{n}{ { {y}_{i}}^{2}}}} cos(θ)=∣x∣⋅∣y∣xTy=i=1∑nxi2i=1∑nyi2i=1∑nxiyi
(4). Pearson皮尔逊相关系数:
ρ X Y = cov ( X , Y ) σ X σ Y = E [ ( X − μ X ) ( Y − μ Y ) ] σ X σ Y = ∑ i = 1 n ( x − μ X ) ( y − μ Y ) ∑ i = 1 n ( x − μ X ) 2 ∑ i = 1 n ( y − μ Y ) 2 { {\rho }_{XY}}=\frac{\operatorname{cov}(X,Y)}{ { {\sigma }_{X}}{ {\sigma }_{Y}}}=\frac{E[(X-{ {\mu }_{X}})(Y-{ {\mu }_{Y}})]}{ { {\sigma }_{X}}{ {\sigma }_{Y}}}=\frac{\sum\limits_{i=1}^{n}{(x-{ {\mu }_{X}})(y-{ {\mu }_{Y}})}}{\sqrt{\sum\limits_{i=1}^{n}{ { {(x-{ {\mu }_{X}})}^{2}}}}\sqrt{\sum\limits_{i=1}^{n}{ { {(y-{ {\mu }_{Y}})}^{2}}}}} ρXY=σXσYcov(X,Y)=σXσYE[(X−μX)(Y−μY)]=i=1∑n(x−μX)2i=1∑n(y−μY)2i=1∑n(x−μX)(y−μY)
Pearson相关系数即将 x x x、 y y y坐标向量各自平移到原点后的夹角余弦。
2.聚类的衡量指标
(1). 均一性: p p p
类似于精确率,一个簇中只包含一个类别的样本,则满足均一性。其实也可以认为就是正确率(每个 聚簇中正确分类的样本数占该聚簇总样本数的比例和)
(2). 完整性: r r r
类似于召回率,同类别样本被归类到相同簇中,则满足完整性;每个聚簇中正确分类的样本数占该
类型的总样本数比例的和
(3). V-measure:
均一性和完整性的加权平均
V = ( 1 + β 2 ) ∗ p r β 2 ∗ p + r V = \frac{(1+\beta^2)*pr}{\beta^2*p+r} V=β2∗p+r(1+β2)∗pr
(4). 轮廓系数
样本 i i i的轮廓系数: s ( i ) s(i) s(i)
簇内不相似度:计算样本 i i i到同簇其它样本的平均距离为 a ( i ) a(i) a(i),应尽可能小。
簇间不相似度:计算样本 i i i到其它簇 C j C_j Cj的所有样本的平均距离 b i j b_{ij} bij,应尽可能大。
轮廓系数: s ( i ) s(i) s(i)值越接近1表示样本 i i i聚类越合理,越接近-1,表示样本 i i i应该分类到 另外的簇中,近似为0,表示样本 i i i应该在边界上;所有样本的 s ( i ) s(i) s(i)的均值被成为聚类结果的轮廓系数。
s ( i ) = b ( i ) − a ( i ) m a x { a ( i ) , b ( i ) } s(i) = \frac{b(i)-a(i)}{max\{a(i),b(i)\}} s(i)=max{ a(i),b(i)}b(i)−a(i)
(5). ARI
数据集 S S S共有 N N N个元素, 两个聚类结果分别是:
X = { X 1 , X 2 , . . . , X r } , Y = { Y 1 , Y 2 , . . . , Y s } X=\{ { {X}_{1}},{ {X}_{2}},...,{ {X}_{r}}\},Y=\{ { {Y}_{1}},{ {Y}_{2}},...,{ {Y}_{s}}\} X={ X1,X2,...,Xr},Y={ Y1,Y2,...,Ys}
X X X和 Y Y Y的元素个数为:
a = { a 1 , a 2 , . . . , a r } , b = { b 1 , b 2 , . . . , b s } a=\{ { {a}_{1}},{ {a}_{2}},...,{ {a}_{r}}\},b=\{ { {b}_{1}},{ {b}_{2}},...,{ {b}_{s}}\} a={ a1,a2,...,ar},b={ b1,b2,...,bs}
记: n i j = ∣ X i ∩ Y i ∣ { {n}_{ij}}=\left| { {X}_{i}}\cap { {Y}_{i}} \right| nij=∣Xi∩Yi∣
A R I = ∑ i , j C n i j 2 − [ ( ∑ i C a i 2 ) ⋅ ( ∑ i C b i 2 ) ] / C n 2 1 2 [ ( ∑ i C a i 2 ) + ( ∑ i C b i 2 ) ] − [ ( ∑ i C a i 2 ) ⋅ ( ∑ i C b i 2 ) ] / C n 2 ARI=\frac{\sum\limits_{i,j}{C_{ { {n}_{ij}}}^{2}}-\left[ \left( \sum\limits_{i}{C_{ { {a}_{i}}}^{2}} \right)\cdot \left( \sum\limits_{i}{C_{ { {b}_{i}}}^{2}} \right) \right]/C_{n}^{2}}{\frac{1}{2}\left[ \left( \sum\limits_{i}{C_{ { {a}_{i}}}^{2}} \right)+\left( \sum\limits_{i}{C_{ { {b}_{i}}}^{2}} \right) \right]-\left[ \left( \sum\limits_{i}{C_{ { {a}_{i}}}^{2}} \right)\cdot \left( \sum\limits_{i}{C_{ { {b}_{i}}}^{2}} \right) \right]/C_{n}^{2}} ARI=21[(i∑Cai2)+(i∑Cbi2)]−[(i∑Cai2)⋅(i∑Cbi2)]/Cn2i,j∑Cnij2−[(i∑Cai2)⋅(i∑Cbi2)]/Cn2
14降维(Dimensionality Reduction)
14.1 动机一:数据压缩(Motivation I:Data Compression)
本章介绍第二种类型的无监督学习问题,称为降维。降维作用:一是数据压缩,数据压缩不仅允许压缩数据,也加快学习算法。
将数据从二维降至一维:
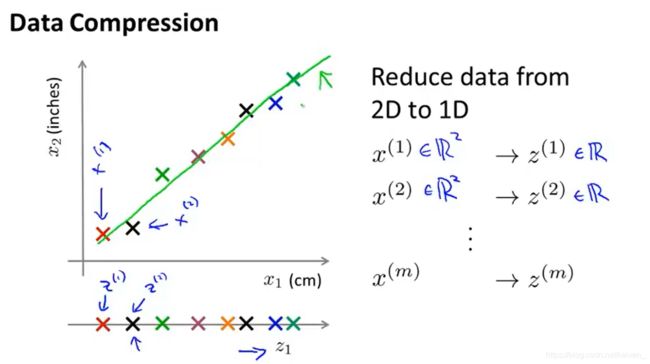
假使要采用两种不同的仪器来测量一些东西的尺寸,其中一个仪器测量结果的单位是英寸,另一个仪器测量的结果是厘米,希望将测量的结果作为机器学习的特征。现在的问题的是,两种仪器对同一个东西测量的结果不完全相等(由于误差、精度等),而将两者都作为特征有些重复,不想有高度冗余的特征,因而希望将这个二维的数据降至一维。
将数据从三维降至二维:

14.2 动机二:数据可视化(Motivation II:Visualization)
降维可以将数据可视化。使用降维的方法将多维数据降至2维,便可以将其可视化了。降维的算法只负责减少维数,新产生的特征的意义就必须由我们自己去发现了。
14.3 主成分分析问题(Principal Component Analysis Problem Formulation)
主成分分析(PCA)是最常见的降维算法。在PCA中,要找到一个方向向量(Vector direction),当把所有的数据都投射到该向量上时,希望投射平均均方误差能尽可能地小。方向向量是一个经过原点的向量,而投射误差是从特征向量向该方向向量作垂线的长度。
下面给出主成分分析问题的描述:
问题是要将 n n n维数据降至 k k k维,目标是找到向量 u ( 1 ) u^{(1)} u(1), u ( 2 ) u^{(2)} u(2),…, u ( k ) u^{(k)} u(k)使得总的投射误差最小。
主成分分析与线性回顾的比较:
主成分分析与线性回归是两种不同的算法。主成分分析最小化的是投射误差(Projected Error),而线性回归尝试的是最小化预测误差。线性回归的目的是预测结果,而主成分分析不作任何预测。
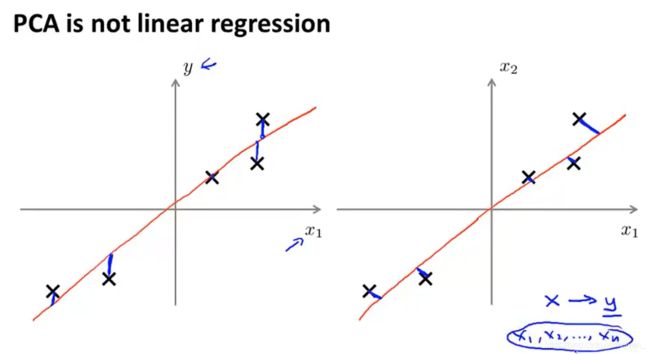
上图中,左边的是线性回归的误差(垂直于横轴投影),右边则是主要成分分析的误差(垂直于红线投影)。
PCA将 n n n个特征降维到 k k k个,可以用来进行数据压缩,如果100维的向量最后可以用10维来表示,那么压缩率为90%。图像处理领域的KL变换使用PCA做图像压缩。但PCA*要保证降维后,还要保证数据的特性损失最小。
PCA技术的一大好处是对数据进行降维的处理。我们可以对新求出的“主元”向量的重要性进行排序,根据需要取前面最重要的部分,将后面的维数省去,可以达到降维从而简化模型或是对数据进行压缩的效果。同时最大程度的保持了原有数据的信息。
PCA技术的一个很大的优点是,它是完全无参数限制的。在PCA的计算过程中完全不需要人为的设定参数或是根据任何经验模型对计算进行干预,最后的结果只与数据相关,与用户是独立的。
但是,这一点同时也可以看作是缺点。如果用户对观测对象有一定的先验知识,掌握了数据的一些特征,却无法通过参数化等方法对处理过程进行干预,可能会得不到预期的效果,效率也不高。
14.4 主成分分析算法(Principal Component Analysis Algorithm )
PCA 减少 n n n维到 k k k维步骤:
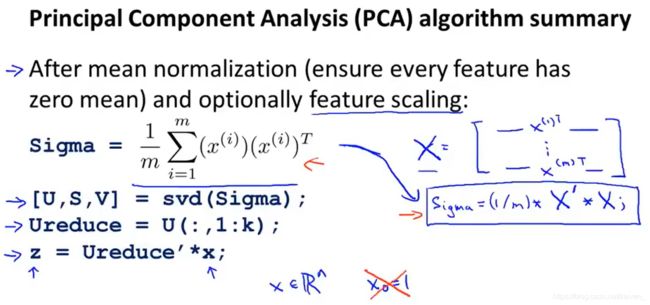
- 均值归一化。需要计算出所有特征的均值,然后令 x j = x j − μ j x_j= x_j-μ_j xj=xj−μj。如果特征是在不同的数量级上,还需要将其除以标准差 σ 2 σ^2 σ2。
- 计算协方差矩阵(covariance matrix) Σ Σ Σ:
∑ = 1 m ∑ i = 1 n ( x ( i ) ) ( x ( i ) ) T \sum=\dfrac {1}{m}\sum^{n}_{i=1}\left( x^{(i)}\right) \left( x^{(i)}\right) ^{T} ∑=m1∑i=1n(x(i))(x(i))T - 计算协方差矩阵 Σ Σ Σ的特征向量(eigenvectors):
可以利用奇异值分解(singular value decomposition)来求解,[U, S, V]= svd(sigma)。
对于一个 n × n n×n n×n维度的矩阵,上式中的 U U U是一个具有与数据之间最小投射误差的方向向量构成的矩阵。如果希望将数据从 n n n维降至 k k k维,只需要从 U U U中选取前 k k k个向量,获得一个 n × k n×k n×k维度的矩阵,用 U r e d u c e U_{reduce} Ureduce表示,然后通过如下计算获得要求的新特征向量 z ( i ) z^{(i)} z(i):
z ( i ) = U r e d u c e T ∗ x ( i ) z^{(i)}=U^{T}_{reduce}*x^{(i)} z(i)=UreduceT∗x(i)
其中 x x x是 n × 1 n×1 n×1维的,因此结果为 k × 1 k×1 k×1维度。
注意:不对方差特征进行处理。
14.5 选择主成分的数量(Choosing The Number Of Principal Components)
主成分分析是减少投射的平均均方误差:
训练集的方差为: 1 m ∑ i = 1 m ∥ x ( i ) ∥ 2 \dfrac {1}{m}\sum^{m}_{i=1}\left\| x^{\left( i\right) }\right\| ^{2} m1∑i=1m∥∥x(i)∥∥2
希望在平均均方误差与训练集方差的比例尽可能小的情况下选择尽可能小的 k k k值。
如果希望这个比例小于1%,就意味着原本数据的偏差有99%都保留下来了,如果选择保留95%的偏差,便能非常显著地降低模型中特征的维度了。
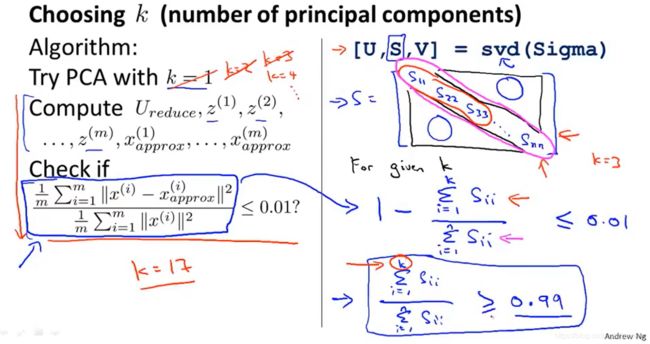
可以先令 k = 1 k=1 k=1进行主要成分分析,获得 U r e d u c e U_{reduce} Ureduce和 z z z,然后计算比例是否小于1%。如果不是的话再令 k = 2 k=2 k=2,如此类推,直到找到可以使得比例小于1%的最小 k k k 值(原因是各个特征之间通常情况存在某种相关性)。
还有一些更好的方式来选择 k k k,当在Octave中调用“svd”函数的时候,获得三个参数:[U, S, V] = svd(sigma)。
其中 S S S是一个 n × n n×n n×n的矩阵,只有对角线上有值,而其它单元都是0,可以使用这个矩阵来计算平均均方误差与训练集方差的比例:
1 m ∑ i = 1 m ∥ x ( i ) − x a p p r o x ( i ) ∥ 2 1 m ∑ i = 1 m ∥ x ( i ) ∥ 2 = 1 − Σ i = 1 k S i i Σ i = 1 m S i i ≤ 1 % \dfrac {\dfrac {1}{m}\sum^{m}_{i=1}\left\| x^{\left( i\right) }-x^{\left( i\right) }_{approx}\right\| ^{2}}{\dfrac {1}{m}\sum^{m}_{i=1}\left\| x^{(i)}\right\| ^{2}}=1-\dfrac {\Sigma^{k}_{i=1}S_{ii}}{\Sigma^{m}_{i=1}S_{ii}}\leq 1\% m1∑i=1m∥∥x(i)∥∥2m1∑i=1m∥∥∥x(i)−xapprox(i)∥∥∥2=1−Σi=1mSiiΣi=1kSii≤1%
也就是: Σ i = 1 k s i i Σ i = 1 n s i i ≥ 0.99 \frac {\Sigma^{k}_{i=1}s_{ii}}{\Sigma^{n}_{i=1}s_{ii}}\geq0.99 Σi=1nsiiΣi=1ksii≥0.99
在压缩过数据后,我们可以采用如下方法来近似地获得原有的特征: x a p p r o x ( i ) = U r e d u c e z ( i ) x^{\left( i\right) }_{approx}=U_{reduce}z^{(i)} xapprox(i)=Ureducez(i)
14.6 重建的压缩表示(Reconstruction from Compressed Representation)
PCA作为压缩算法。可能需要把1000维的数据压缩100维特征,或具有三维数据压缩到一二维表示。如果这是一个压缩算法,应该能回到原有的高维数据的一种近似。

如图中样本 x ( 1 ) x^{(1)} x(1), x ( 2 ) x^{(2)} x(2)等。把这些样本投射到图中这个一维平面。然后需要只使用一个实数,比如 z ( 1 ) z^{(1)} z(1),指定这些点的位置后他们被投射到这一个三维曲面。
给定一个点 z ( 1 ) z^{(1)} z(1),怎么能回去这个原始的二维空间呢? x x x为2维, z z z为1维, z = U r e d u c e T x z=U^{T}_{reduce}x z=UreduceTx,相反的方程为: x a p p o x = U r e d u c e ⋅ z x_{appox}=U_{reduce}\cdot z xappox=Ureduce⋅z, x a p p o x ≈ x x_{appox}\approx x xappox≈x。
14.7 主成分分析法的应用建议( Advice for Applying PCA)
假使我们正在针对一张 100×100像素的图片进行某个计算机视觉的机器学习,即总共有10000 个特征。
-
第一步是运用主要成分分析将数据压缩至1000个特征
-
然后对训练集运行学习算法
-
在预测时,采用之前学习而来的 U r e d u c e U_{reduce} Ureduce将输入的特征 x x x转换成特征向量 z z z,然后再进行预测
注:如果有交叉验证集合测试集,也采用对训练集学习而来的 U r e d u c e U_{reduce} Ureduce。
错误的主要成分分析情况:
- 将其用于减少过拟合(减少了特征的数量),这样做非常不好,不如尝试正则化处理。原因在于主要成分分析只是近似地丢弃掉一些特征,它并不考虑任何与结果变量有关的信息,因此可能会丢失非常重要的特征。然而当进行正则化处理时,会考虑到结果变量,不会丢掉重要的数据。
- 将主要成分分析作为学习过程中的一部分,这虽然很多时候有效果,最好还是从所有原始特征开始,只在有必要的时候(算法运行太慢或者占用太多内存)才考虑采用主要成分分析。

错题
- PCA易受局部最优解的影响;尝试多次随机初始化可能会有所帮助。(X)
- 以下哪项是PCA的推荐应用?选择所有正确项(BD)
A. 作为线性回归的替代:对于大多数模型应用,PCA和线性回归给出了基本相似的结果。
B. 数据压缩:减少数据的维数,从而减少占用的内存/磁盘空间。
C. 数据可视化:获取二维数据,并在二维中找到不同的绘制方法(使用k=2)。
D. 数据压缩:减少输入数据 x ( i ) x^{(i)} x(i)的维数,该维数将用于监督学习算法(即使用PCA以使监督学习算法运行更快)