技术解析 | 抛弃骨骼的外骨骼——柔性外骨骼Soft Exosuit
作者:打荷雨
来源 · 知乎
编辑 · 睿小妹
原文 · https://zhuanlan.zhihu.com/p/258082979
本来这一期是想写Sarcos公司的XOS1-2外骨骼,顺便捋一下XOS外骨骼的后继——Sarcos公司于CES 2020上展示的全身外骨骼Guardian XO。但是,美国Sarcos是一家军用机器人公司,几乎找不到XOS外骨骼的“官方论文”,谈到XOS外骨骼的文章,大多是新闻、网站新闻等间接资料。目前我找到的一份较直接的资料则是Sarcos公司于2007年在中国申请的XOS专利[1]。
转眼间来到2020年,国内外的外骨骼研究进入技术低谷期,前几年很少出现一些革命性外骨骼产品,XOS系列外骨骼距离现在已经十年多了呢。
这十年间,外骨骼概念得到了极大的拓展,有仅做单关节的轻巧型外骨骼,也有做无动力源的外骨骼。还有一种抛弃了骨架的柔性外骨骼,以哈佛大学教授Conor Walsh在的Wyss仿生工程研究所的ExoSuit柔性外骨骼为代表,在近些年异军突起,成为了各大实验室研究领域的“热饽饽”。因此,有必要好好谈一谈Soft Exosuit。
多关节Soft Exosuit(左),Conor Walsh(右)
▌引子
2000年DARPA启动的EHPA项目,资助了MIT媒体实验室(MIT Media Lab)的一个项目——“用于运动耐力增强的腿矫形器(Leg Orthoses for Locomotory Endurance Amplification)”[2][3][4].
2006年左右,应该是第一批EHPA资助项目结束验收的时间。彼时,加州伯克利大学的人机工程实验室刚发表了几篇重磅的Bleex外骨骼论文,雷神公司刚研发出XOS全身外骨骼不久,MIT媒体实验室的成果也开始公之于众,它是一款思路独特的外骨骼。
MIT外骨骼
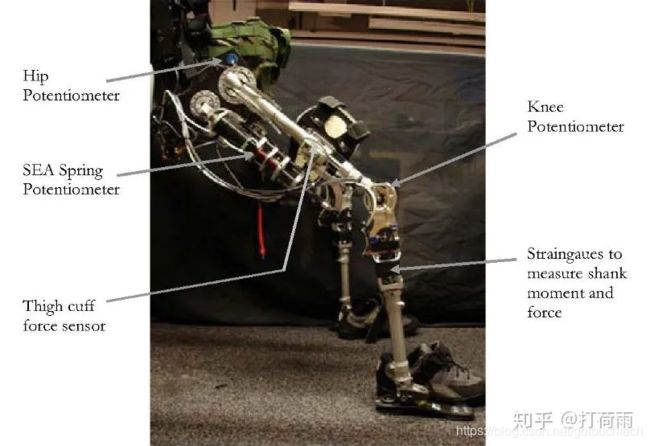
MIT外骨骼的膝关节使用了磁流变阻尼器,在足跟触地时开启磁场,增加流体粘性,增大了膝关节的阻尼,用于代替人体膝关节吸收触地冲击能量。在支撑相中期消磁,为接下来的摆动相膝关节的灵活转动做准备。

膝关节结构
其踝关节用了3个弹簧。脚底后跟处有一个缓震板簧,吸收后跟着地的冲击。脚踝后跟有2个聚氨酯弹簧,采用套筒结构,其中套在外面的伸展弹簧在踝关节伸展时被压,套在里面的屈曲弹簧在换关节屈曲的时候被压。鞋后跟的连杆在两个套筒弹簧中间,传递踝关节运动。因此,踝关节不管是屈曲还是伸展,都受到弹簧力。
在步态周期中,脚触地到支撑中期,后跟板簧和伸展弹簧被压,提供吸收冲击的屈曲力。在脚蹬地时,屈曲弹簧被压,提供蹬地的踝关节伸展力。

踝关节结构
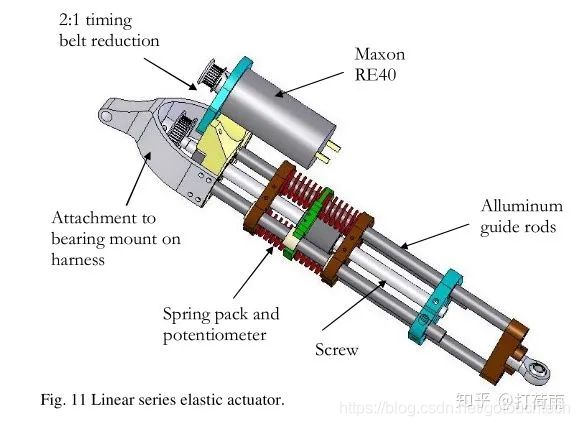
而髋关节有两个方案。一个是用直线串联弹性驱动器(SEA)对髋关节屈/伸自由度驱动。SEA如下图,电机+滚珠丝杠,并在输出端串联弹簧和电位器。SEA的直线运动通过连杆转换为髋关节的屈/伸运动。
另一个方案是在髋关节的伸展自由度上用离合弹簧,髋关节的伸展时接合弹簧提供弹力,屈曲时弹簧分离使其自由摆动。
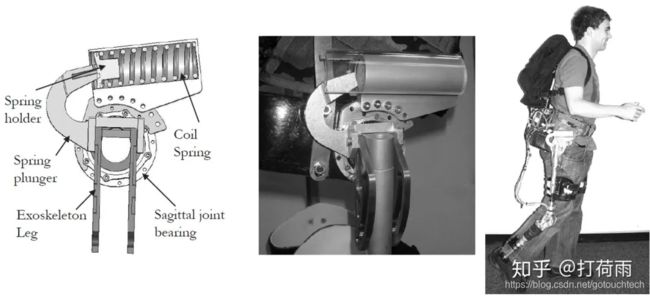
髋关节矢状面视角
对于这款用于负重的轻型外骨骼,制作者先提出了欠驱动(underactuated)外骨骼概念来形容,指只驱动部分关节[2][3]。当髋关节的SEA也被换为离合弹簧时,即整个外骨骼的关节都是非驱动状态,只通过弹簧或者阻尼器在步态周期的合适时机接合与分离来提供助力,这种新型的外骨骼则被制作者称为准被动外骨骼(quasi-passive exoskeleton)[4].
而MIT媒体实验室的这款外骨骼首要制作者,就是Conor Walsh.
2006年,Conor Walsh从MIT获得了机械工程硕士学位后,接着读博士。他在博士期间参与研发了一款针式手术机器人[5][6][7],用于CT机中的遥控手术治疗,并成功让他获得博士学位。
想必在做遥控手术机器人的时候,Walsh对人机交互的思考,以及对可穿戴机器人的兴趣更加深厚了。因此在MIT2010年获得博士学位后,Walsh就跳槽到哈佛大学的Wyss仿生所开始了他的事业。
▌第一代Soft Exosuit
2013年,Wyss研究所做出了第一代下肢柔性外骨骼Soft Exosuit[8],其设计理念具有划时代的意义。

第一代Soft Exosuit
首先,Soft Exosuit在腿部没有传统外骨骼的刚性杆件。与穿戴者绑缚的只是路径经过精心设计的网状绑带。在网状绑带的交汇处,也是经过精心挑选的“锚点”,锚点用于传递驱动力给穿戴者的下肢,而不是以往的刚性关节驱动。
其次,第一代Soft Exosuit选用了麦卡宾气动肌肉(McKibben pneumatic muscle)作为驱动器,其肌肉两端通过挂钩连接在各个锚点上。由于麦卡宾气动肌肉只能输出收缩力,因此其连接方式也需要慎重设计。
在下图中,我们可以看到锚点与气动肌肉的布置。其中锚点分为两类,一类是与人体固定用于总承力的部位,称关键锚(Key Anchor),如肩部的肩带、腰部的腰带、足部的鞋。另一类是气动肌肉连接的实锚点(Virtual Anchor)。实锚点受到的驱动力通过布带传递到关键锚上,并产生驱动下肢关节运动的力矩。通过锚点与布带的布置,第一代Soft Exosuit可控下肢在矢状面上的运动。

第一代Soft Exosuit锚点分布与驱动力分析
锚点概念的提出是柔性外骨骼设计中的一个突破。在目前的穿戴装置上,鲜有沿肢体的大力施加于其上,因此我们看到大多数可穿戴设备大多是以缠绕肢体的绑带固定即可,如手表、腰带,这种绑缚方式适合较轻的部件。
而柔性外骨骼是助力装备,为了在人体关节形成较大助力力矩(大约20-80Nm),同时又要贴合人体,则必然要将直线驱动器平行与肢体不远处,并施加大力。其中麦卡宾气动肌肉在0.4Mpa的气压下输出力可达200N,这样的大力施加在垂直于肢体的绑缚装置上必然产生绑缚机构的位移,而且在运动中不断滑移。
在传统刚性下肢外骨骼上,驱动器作用在刚性腿杆上,并在外骨骼关节形成了力矩,并通过外骨骼的绑缚传递给人腿,传递的力是垂直于人腿的力,因此滑移现象不会这么严重(但由于外骨骼关节与人体关节的不对齐,仍会造成绑缚机构的滑移)。这种外骨骼与人体自由度不协调产生的剪切力能对人体关节造成高达1.46Nm的非期望力矩[9]
所以,锚点就是为了解决这些问题而被引入。通过在人体中刚性较大适合受力的部位设置锚点,然后使用柔性材料设计出传力路径,将驱动器的驱动力传递到锚点处,就可以实现柔性绑缚的同时传递助力力矩。锚点被分为关键锚和实锚点也是如此,关键锚取在人体常用的受力部位上,如肩部、腰部和足部,实锚点则取在人体下肢距离骨骼较近的位置,如胯骨、膝盖、脚掌等处。
但是,该外骨骼存在不少的问题。
其一是,其简陋的时间序列控制方案不尽人意。该外骨骼采用了6个开关阀控制气动肌肉的收缩与释放,甚至使用手臂上的拨动开关来控制。也就是,拨动开关1打开,气动肌肉1充气收缩,拨动开关1关闭,气动肌肉1将气体排出并舒展,拨动开关2也是如此。可想而知,将人体复杂运动转化为手动开关控制,其控制难度不亚于玩游戏QWOP。

其二是,即使锚点和气动肌肉传力路径经过精心设计,还是避免不了穿戴舒适性的问题。只要锚点确定,驱动力臂也就确定,而气动肌肉的简单开关控制使得其最大输出力矩与实际关节需求不匹配,其中踝关节的气动肌肉输出峰值力就高达933N。而如文章所说,实际使用中却因为锚点与穿戴者连接处存在一定的柔性,使得这种峰值力被减弱了,从另一方面表明,该套Soft Exosuit的锚点其实不是完全刚性的。
最后在实际测试中,穿戴该外骨骼和不穿戴外骨骼进行行走时的受试者代谢相差无几,甚至穿上后代谢更高。但这不能否认第一代Soft Exosuit的柔性设计在当时是一种突破。
▌第二代Soft Exosuit
一年后(2014年),Conor Walsh实验室下的丁也博士团队拿出了改进版Soft Exosuit。这次,改进版的外骨骼只驱动髋关节和踝关节,同时将驱动源换成了鲍登线驱动[10]。
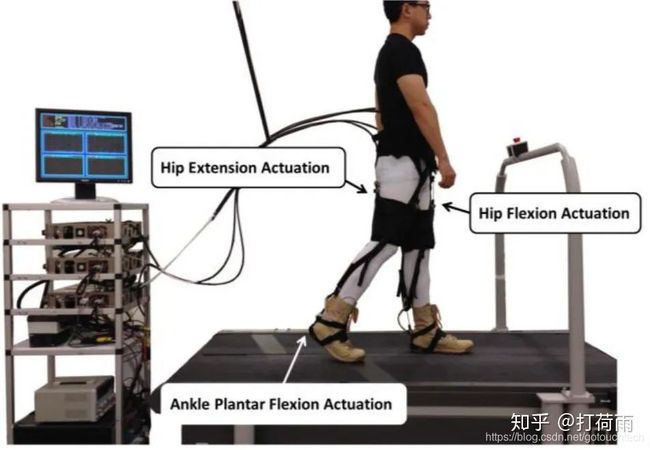
第二代Soft Exosuit最初版本的驱动源放在地面,驱动髋关节屈/伸自由度,和踝关节的屈曲自由度
鲍登线就类似于自行车的刹车线,外部有高刚性的套管,内部是钢丝(套索)。外部刚性套管保证了套管沿长度方向几乎不可压缩,当套管被固定时,其内部的钢丝就可以传递拉力。

自行车刹车线模型
改进版Soft Exosuit的整体柔性绑缚也大幅删改,如下图所示。整套服装分为踝关节驱动模块与髋关节驱动模块两部分。两部分可以同时穿戴,也可以只穿戴一部分,具有了模块化特性,改变驱动关节数量就像加穿衣服那样自然。

踝关节细节(左),髋关节细节(右)
对于踝关节驱动模块。用于整体承力的关键锚有两个部位,一是腰部的腰带,二是足底靴子。传力布带从腰带延伸到大腿前部,与膝盖进行绑定后通过两根布带绕过小腿,并在小腿后部会和,形成实锚点A。足底靴子的关键锚通过三条路径与靴子固定,并在后跟处形成实锚点B。
对于髋关节驱动模块。关键锚就只是腰部的护腰。护腰在大腿根及后臀部引出实锚点C和D,而另外两处实锚点E和F则是在没有和关键锚连接的大腿绑带上。所以大腿处的实锚点E、F比靴子上的实锚点B柔性更大,这导致了髋关节的驱动力须比踝关节要小。
鲍登线套管的一端分别固定在实锚点A、C、D上,另一端分别固定在地面驱动器的支架上。从套管中伸出的内线末端一端固定在B、E、F上的拉力传感器上,另一端则和驱动器中的直线滑块上的拉力传感器连接。B、E、F上的拉力传感器测的是被驱动端实际受到的力,而驱动模块中的拉力传感器测的是驱动端的输出力。

鲍登线驱动模块布置示意图(A,注:该图为后续改进版,髋关节只有驱动伸展的自由度),第二代Soft Exosuit外观图(B、C)

后跟的具体结构及力传感器(靴子上4个白色圆球是实验时用于光学跟踪的反光球)
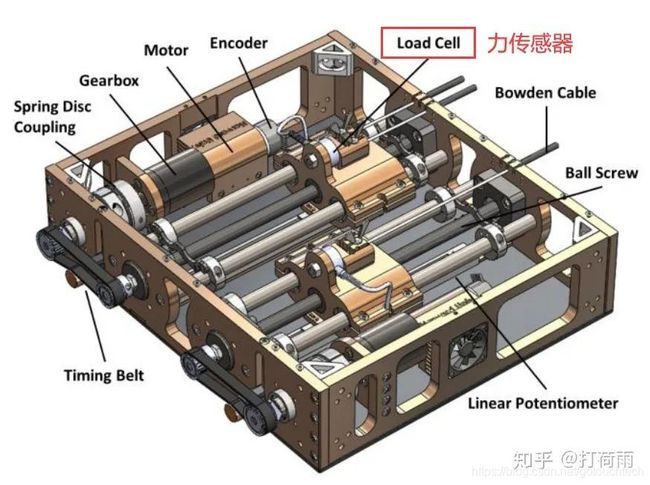
地面上的驱动模块
每根鲍登线的驱动器由一个电机+同步带+滚珠丝杠+丝杠滑块组成。电机转动通过同步带驱动滚珠丝杠转动,丝杠滑块产生线性运动拉动内线,套管一端被固定无法移动,因此动力只通过内线传递到另一端的锚点。
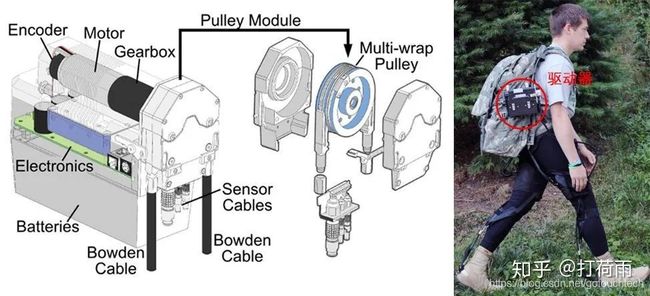
不久后,这款改进版的Soft Exosuit终于迎来了它的移动版本[11],至此,该外骨骼可以称得上Wyss研究所的第二代Soft Exosuit。
第二代移动版的Soft Exosuit与固定版的主要区别就是设计了新的便携卷扬式驱动器。
由下图可见,卷样式驱动器结构相对简单,将滚珠丝杠拉线换成了卷盘拉线,套索拉力的测量也换成了一个张紧轮张力测量系统。该测量系统由一个被动张紧轮和悬臂应变测力桥组成,可以测出测力桥受到的垂直载荷,进而受力分析出套索的张力。

卷扬式驱动器原理图(左),驱动器实物图(右)
由于鲍登线传动系统的力特性,套索传递效率会因为套管曲率、行走时腿部的状态等因素时刻变化,因此套索驱动端和从动端的张力并不相等。这个结论可以通过比较套索末端拉力传感器测得的力和驱动器中的张力测量系统测得的力得来。因此在实际的驱动控制上其实采用了位置控制。
改进后的驱动器具体结构如下图。由上所述,由于鲍登线传动系统采用的是位置控制,因此去除了张力测量系统,只用电机端的编码器测驱动轮的角度,进而控制驱动套索的位置。
每个驱动器包含了一个200W的Maxon EC30电机,一个行星减速器(踝关节79:1减速比,髋关节33:1),驱动板,一个3cm半径的多槽线轮(可拆换),一个电池,驱动板控制线接头
▌一些问题
1.为什么第二代Soft Exosuit的传力带路径要这样设计呢?
因为主要是踝关节模块的传力路径比较特殊,我们以踝关节模块来分析。
在人体行走过程中,踝关节主要是通过在支撑相的末尾蹬地来做正功,也就是踝关节的伸展(plantarflexion)运动做正功。因此为了在踝关节提供驱动力,需要用鲍登线拉后脚跟部位提供拉力,因而套管的固定位置就必须在小腿后部。
显然从腰部直接连接到小腿后部可以满足套管的安装要求,但是这会给膝关节带来额外力矩,就像脚后跟连了根橡胶绳到屁股,会给膝关节的伸展运动带来阻碍。为了最小化给膝关节增加的额外力矩,传力路径必须接近膝关节旋转中心,然后顺势绕到大腿前部来。
为了对称受力,两条这样的路径分别从小腿后部经过膝关节绕到大腿前部,并在髋关节附近交汇。该交汇点又可以分流到左右腰部,从而减轻了该点的局部压迫。
综上所述,踝关节的传力路径就如下图所示设计。
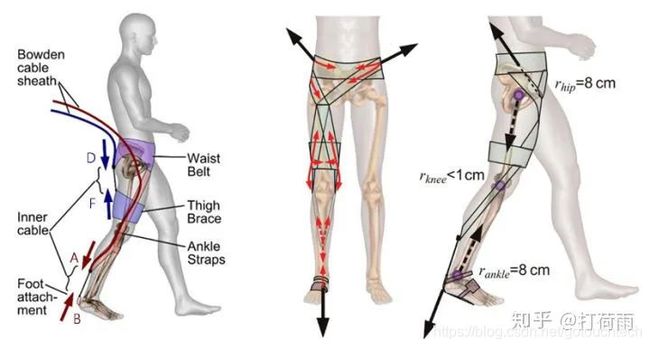
套索布置示意图(左),踝关节传力带传力路径(中右)。其中黑色实线箭头代表套索张力,黑色虚线箭头代表人体骨骼力,红色箭头代表传力带张力。
但由于传力路径经过的是人体下肢表皮,在运动中并不能保证路径长度不变。而传力布带弹力不能过大(否则变形过大影响锚点位置),因此传力布带在步行运动中总会发生松弛。
Soft Exosuit选择以最长的传力路径作为传力布带的长度,即在人腿在支撑相完成伸展即将蹬地时的传力路径长度。因此在步态周期的其他大部分时间,传力布带都是松弛的,如下图

传力布带(蓝色)与传力路径(黑色)的长度在步态周期中各个时刻的比较。只有在步态周期的50%阶段时传力带长度小于传力路径,布带被张紧
2.柔性外骨骼与常规刚性外骨骼相比,需要注意哪些方面的问题?
首先,由于是柔性布料制成的服装,布料肯定会有较大的弹性,否则不便于贴合人体穿戴。因此,整个外骨骼服存在一个等效刚度,它等于,传力路径上布料的刚度、鲍登线套管刚度、服装包裹人体柔性组织产生的等效刚度,这三个刚度的并联等效刚度,如下图所示。

弯折的黑线表示等效弹簧。三种等效弹簧是并联的关系,因此外骨骼服总刚度是其等效弹簧的并联刚度
这种外骨骼服等效刚度相较于SEA驱动器中弹性体的刚度更小。本来SEA在驱动器中引入弹性元件就给控制带来了相位滞后等问题,Soft Exosuit更柔软,因此会降低系统的传动效率,即很多能量都耗散在这些等效弹簧上去了。
因此,首先要从硬件上确保的是,需要使外骨骼服的刚度尽可能大,如选用弹性更小的绑缚布料、加固锚点处以防止锚点偏离预期位置、尽可能选择更直接的传力路径,以减少径向作用于人体组织的压力,进而减弱人体组织等效刚度的影响。
其次,还得从穿戴者穿戴舒适程度上考虑,避免绑缚部位产生很大的压力,对人体造成不适。因此还得加宽绑缚部位。
2018年,Wyss研究所推出了两套Soft Exosuit,一套是针对脑卒中导致的偏瘫患者设计的单侧踝关节外骨骼[12],一套则是在第二代Soft Exosuit上改进的髋踝Soft Exosuit[13][14]。

单侧踝关节Soft Exosuit外骨骼
2018年改进的多关节Soft Exosuit
先说一下单侧踝关节的Soft Exosuit。该套外骨骼是由2015年Wyss研究所研发的用于偏瘫患者的Soft Exosuit改进的移动版本[15]。由于是用于运动机能部分丧失的偏瘫患者,因此其助力思路相较于健康人版本有些微变化。
首先,考虑偏瘫患者的踝关节运动功能不正常,因此在步行运动所在的矢状面上不能只驱动一个方向,所以踝关节的屈/伸自由度都被驱动。所以2015年的版本相较于之前的Soft Exosuit,在小腿前部多了一个实锚点绑缚(DF calf wrap),用以固定屈曲方向的鲍登线套管,位于膝盖下方小腿处。小腿绑缚和腰部连下来的传力带是互相独立的,也是模块化设计。
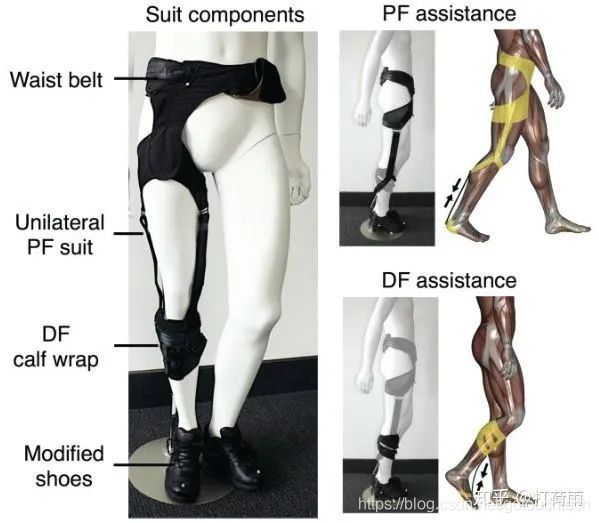
2018年的改进版简化了传力路径。由下图可见,该小腿绑缚设计得更宽了,这使得小腿绑缚足够牢靠,因此可以取消腰部延伸下来的传力带,屈/伸自由度的鲍登线套管则也可以固定在小腿绑缚上了。
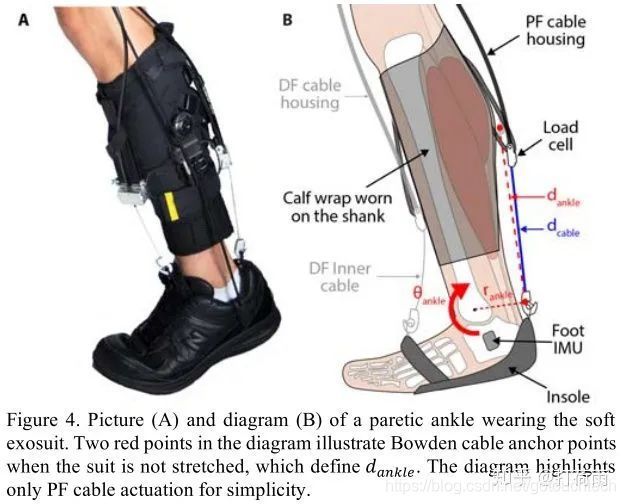
即使将套管固定在绑缚上,在施加驱动力的时候,由于绑缚的部分柔性,实锚点位置总会改变,因此在控制模型中也必须考虑绑缚柔性,以及套索松弛时的粘滞特性。
该外骨骼的驱动系统如下图所示,仍旧是电机+行星减速器+套索线轮的形式,额外设计了风冷散热系统。其余不再赘述。

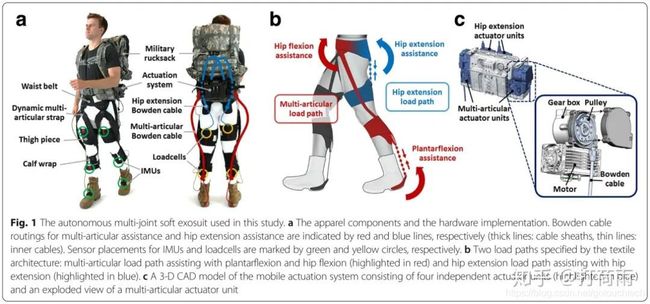
再说第二代Soft Exosuit上改进的髋踝Soft Exosuit,姑且称为第三代Soft Exosuit吧。
第三代Soft Exosuit比较完整地集成了多个关节的驱动控制与意图感知。
髋踝关节的传力路径与第二代类似,但增加了一个小腿处的绑缚。在小腿绑缚处有一个巧妙的动滑轮结构。这个结构通过一个动滑轮将腰部延伸下来的传力带与小腿绑缚连接起来,如下图D所示。动滑轮是一个细长筒,一条布带从其中穿过。
D图中橙黄色的线为鲍登线套管,在被驱动时产生推力,以此向下顶住动滑轮,在小腿绑缚后部固定安装拉力传感器,再串联布带,绕过动滑轮,再连接到腰部传力带上。鲍登线套管固定处穿出鲍登线套索,与足跟实锚点连接。
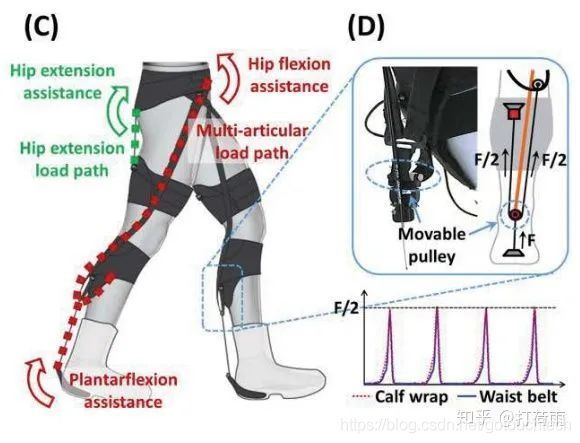
这个结构通过动滑轮原理,将小腿绑缚承受的力和腰部传力带承受的力减半,相当于使用了两处实锚点固定鲍登线套管,增加了传力路径上的等效刚度,穿戴舒适性也更好一些。而且拉力传感器不再直接串联套索,而是直接安装在绑缚处,进一步减小了踝关节后跟处体积。
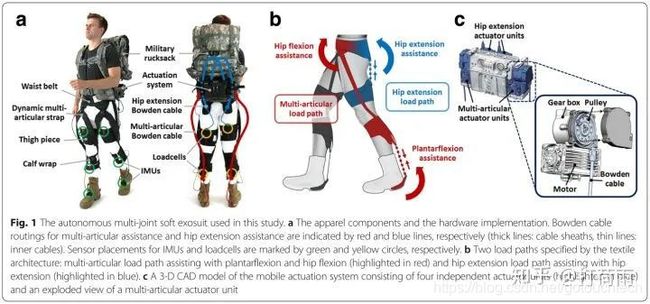
除此之外,还进一步改进了驱动模块,将两个单腿驱动模块集成到一起,传动方式改成蜗轮蜗杆,同时整合了风冷系统、散热鳍,提升了散热性能。
▌重点介绍一下第三代Soft Exosuit的控制策略
1.底层控制
该外骨骼采用的传感器有,大小腿及脚掌上固定的惯性姿态传感器IMU,大腿绑缚和小腿绑缚在鲍登线末端串联的拉力传感器。
前面所述,套索控制中存在的粘滑效应使得底层驱动控制只能用位置控制。那如何才能使用位置控制去获得期望的关节助力?
他们采用了步进自适应控制的方法。表征助力大小的是助力的峰值,如果测量力峰值比期望力峰值小,则在后续多次的步态周期中逐步增大位置控制量,直到测量力趋近期望助力。如果测量力峰值超出了期望助力峰值,那就相应地步进减小位置控制量。每次步态周期中只改变一个很小的位置量,不要求马上达到期望力而是逐渐接近期望力。这样就实现了用位置控制力的结果。
下图所示的是面对不平的路面时,在两种情况下(脚跟踩到凸起,脚掌踩到凸起,区分这两种情况用的是脚掌处的IMU),控制器自动调整位置控制量以达到踝关节受到的助力维持在恒定水平[14]。
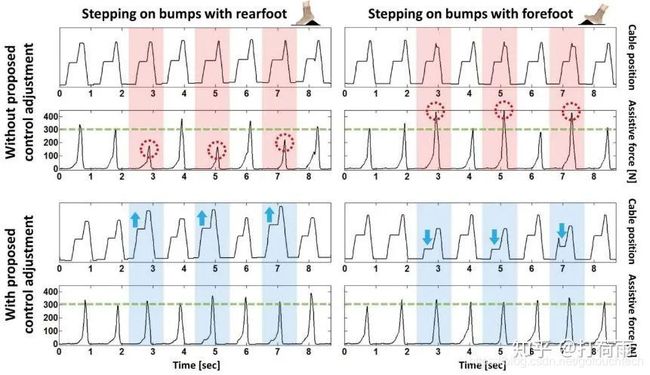
由图中蓝色箭头所在的步态周期可以看到,经过末端位置控制调整,关节受到的助力维持在了恒定值。
2.上层控制
有了力跟踪性能好的驱动器了,那怎么获得套索末端的期望位置轨迹曲线呢?这就需要上层控制的参数在线调整了。
以踝关节为例,如下图(B)所示,通过支撑腿的IMU解算出足底和小腿的角度曲线第第一个峰值,可以定义支撑腿触地时间点T0,和足底开始蹬地的时间点T1;通过拉力传感器在步态周期的35%-60%的峰值力曲线,可以定义套索收缩助力峰值保持时间点T2,套索释放开始时间点T3;还可定义在套索收紧前(T1)的补偿位置PosOffset,和套索收紧极限位置PosMax(T2~T3 时间段)
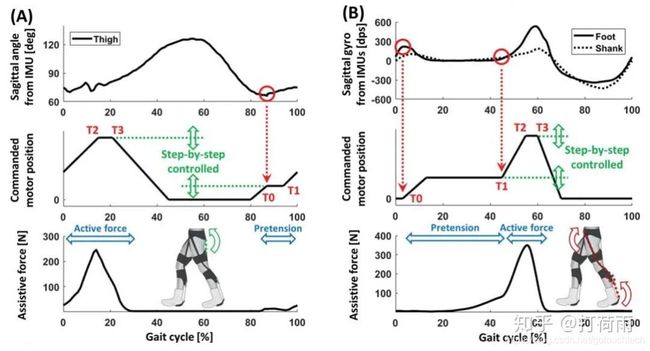
以上6个参数定义了鲍登线套索末端期望位置轨迹曲线,如上图中间图像所示。
T0~T1为预紧相,将套索预收缩一段距离并保持。补偿位置PosOffset的引入就是让套索在收缩前保持预紧。预紧后的套索可以提供被动拉力,且相较于非预紧状态更能快速响应。套索收缩速度为65%的最大速度(394mm/s),由之前的实验来权衡设定。
T1~T2则是套索开始收缩,T2套索开始保持极限位置。一直保持到拉力传感器检测到的力开始下降,即T3时刻时,套索开始释放。T1~T3统称主动助力相。
从T3开始,套索释放直到完全松弛,松弛速度更快(606mm/s),松弛的套索不会影响摆动腿的自由活动。
这6个参数并不是固定不变的,它们会随着不同穿戴者的行走习惯、体态改变而改变,就算同一个穿戴者,其行走步频也会影响这些参数。因此总是需要对这些参数进行实时调整,调整参数的目标是在步态周期内获得最大的助力正功。
对于文献[13],只探讨了踝关节驱动模块的参数调整上层控制。
由上所述,T0可以从IMU角度曲线出现第一个峰值的时刻来定义,T3可以通过拉力传感器力曲线第二个峰值开始下降的时刻来定义。套索的补偿位置PosOffset和极限位置PosMax则已经通过底层控制自适应调整了。
剩下的两个参数T1,T2中,文献将调整参数选为 T1MA和DMA (其中DMA=T2MA-T1MA,即套索主动助力收缩过程的时间,下标MA代表踝部多关节,与文献中符号保持一致)。选择这两个参数的原因是这两个参数与踝关节助力正功的变化高度相关,而其他参数则不那么明显。
作为优化目标的踝关节的助力正功,可由踝关节测得的速度(多个IMU测得)和助力(拉力传感器测得)计算获得。假设了踝关节的助力力臂为10cm,则速度乘以助力力矩可得每一时刻的角功率,再积分就可获得总正功。
在线参数调整的算法是一个简单的2D扫描法,简单来说就是固定A参数,B参数变动,选取助力正功最大时的B参数固定,再来变动A参数。每个参数都是以固定比例步长的量来变动的。T1MA 和 DMA 的变动范围设为步态周期的35-50%和7.5-22.5%,变动步长为步态周期的5%。这样下来,总共有16个参数组合,将结果绘制在2维平面上,横纵坐标代表两个变化参数,优化目标用热力图表示,如下图所示。

①②③④表示扫描过程,从①方向开始扫描,到最优参数的8.12处停止,再从②方向扫描,到8.64停止,以此类推,最终停在助力正功数值为8.7处,此时的两个参数为最优参数
由此,可以获得在最优助力正功下的同一穿戴者的最优参数 T1MA和 DMA 了。对于不同穿戴者,则可分别进行在线参数调整以获得各自的最优参数。6个参数都确定下来了,也就确定了优化后的末端期望位置曲线轨迹,上层控制任务完成。
对于髋关节模块的上层优化控制,文献[16]则采用了贝叶斯优化方法,以净代谢率为优化目标,以髋关节助力曲线的峰值时间(Peak timing)和助力释放时间(Offset timing)为调整参数。因篇幅原因,不在此叙述。
▌效果评估
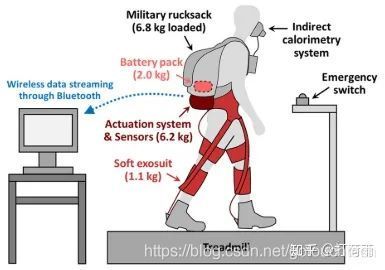
Conor Walsh团队评估外骨骼效用都是通过测试耗氧量来估计人体代谢的,一般过程如下图所示。在跑步机上行走,受试者口鼻佩戴间接卡路里消耗测量系统的呼吸罩,然后通过一段时间的卡路里消耗推算代谢消耗(使用布洛克韦方程推算,Brockway equation)。
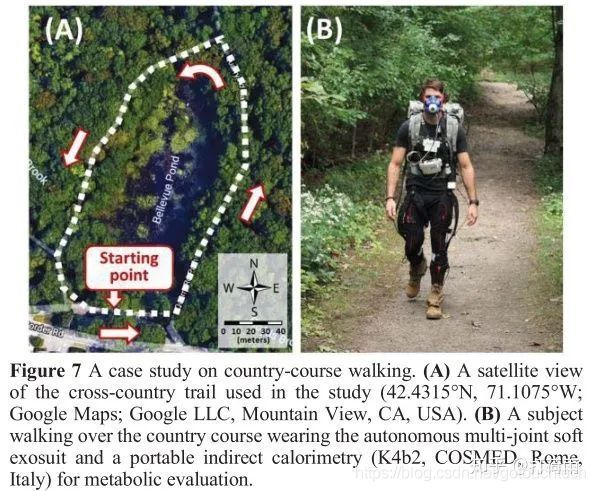
当然也有实地测试的,如下图所示。
第一代Soft Exosuit的助力效果毫无疑问是失败的,穿戴后启动设备行走,穿戴者的代谢功率仅比不启动设备低10.2%,且比不穿戴时行走的代谢功率略高。但是不否认第一代Soft Exosuit的革命性。
第二代Soft Exosuit中间穿插了很多版本,就以年份来说吧。2014年的第一代以鲍登线驱动的Soft Exosuit,总重10.1kg,其中腿部质量2kg,续航时间达4h,可对髋关节提供30%的屈曲助力,对踝关节提供18%的屈曲助力。穿戴/助力与穿戴/未助力的对比实验中可降低穿戴者6.4%±3.9%的代谢值,约36W。2016年使用新的控制策略后,帮穿戴者降低的代谢率达到了11%~15%[17]。
第三代Soft Exosuit经过进一步优化,在1.5m/s的行走速度下,背负6.8kg负载,穿戴/助力相对于不穿戴,实验测得能降低14.88%±1.09%的代谢,相对穿戴/未助力能降低22.03%±2.23%的代谢。
2018年的Conor Walsh团队发表在Science Robotics的文章[16]表明,使用贝叶斯优化方法调整控制参数,即使只用髋关节模块Soft Exosuit,其穿戴/助力仍能比未穿戴代谢值低17.4%±3.2%,助力性能约高于其他柔性下肢外骨骼系统60%[17],这也表明了优化控制算法对助力效率的重要性。
▌总结
Soft Exosuit在Conor Walsh团队的努力下,仅花了六七年的时间,就达到了一个很高的高度,不仅在拓宽了外骨骼的概念,也在探索外骨骼控制算法优化和外骨骼效用评估上做了很多有影响力的工作。
最近,他们团队的柔性外骨骼屡屡出奇,从各类视频中也看得到,Soft Exosuit有很好的舒适性、与人体动作协调、甚至在奔跑、跳跃类大动作中也能提供助力,在如今刚性外骨骼的山河中打下一片新天地,而且助力效果还挺好,不得不令人佩服。
参考
1.^S·雅各布森,M·奥利维尔. 接触位移致动系统[P]. 美国:CN101489732,2009-07-22.
2.^abC. J. Walsh, D. Paluska, K. Pasch, W. Grand, A. Valiente, H. Herr, "Development of a lightweight, underactuated exoskeleton for load- carrying augmentation" Proceedings of the IEEE International Conference on Robotics and Automation, Florida USA, pp. 3485 - 3491, 2006
3.^abC. J. Walsh, K. Pasch and H. Herr, An autonomous, underactuated exoskeleton for load-carrying augmentation, in IEEE Int. Conf. Intelligent Robots and Systems (IROS) Beijing, China (IEEE Press, 2006), pp. 1410–1415.
4.^abWALSH C J, ENDO K, HERR H. A quasi-passive leg exoskeleton for load-carrying augmentation[J]. International Journal of Humanoid Robotics, 2007, 4(3): 487–506. DOI:10.1142/S0219843607001126.、5.^Walsh, C. J., Hanumara, N. C., Slocum, A. H., Shepard, J.-A., & Gupta, R. (2008). A Patient-Mounted, Telerobotic Tool for CT-Guided Percutaneous Interventions. Journal of Medical Devices, 2(1), 011007. doi:10.1115/1.2902854
5.^Seitel, A., Walsh, C. J., Hanumara, N. C., Shepard, J.-A., Slocum, A. H., Meinzer, H.-P., … Maier-Hein, L. (2009). Development and evaluation of a new image-based user interface for robot-assisted needle placements with the Robopsy system. Medical Imaging 2009: Visualization, Image-Guided Procedures, and Modeling. doi:10.1117/12.811507
6.^Maier-Hein, L., Walsh, C. J., Seitel, A., Hanumara, N. C., Shepard, J.-A., Franz, A. M., … Meinzer, H.-P. (2009). Human vs. robot operator error in a needle-based navigation system for percutaneous liver interventions. Medical Imaging 2009: Visualization, Image-Guided Procedures, and Modeling. doi:10.1117/12.811334
7.^WEHNER M, QUINLIVAN B, AUBIN P M等. A lightweight soft exosuit for gait assistance[J]. Proceedings - IEEE International Conference on Robotics and Automation, 2013: 3362–3369. DOI:10.1109/ICRA.2013.6631046.
8.^Schiele A. Ergonomics of exoskeletons: Objective performance metrics[C]//3rd Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. Piscataway, USA: IEEE, 2009: 103-108.
9.^DING Y, GALIANA I, ASBECK A等. Multi-joint actuation platform for lower extremity soft exosuits[J]. Proceedings - IEEE International Conference on Robotics and Automation, 2014: 1327–1334. DOI:10.1109/ICRA.2014.6907024.
10.^ASBECK A T, DE ROSSI S M M, HOLT K G等. A biologically inspired soft exosuit for walking assistance[J]. International Journal of Robotics Research, 2015, 34(6): 744–762. DOI:10.1177/0278364914562476.
11.^BAE J, SIVIY C, ROULEAU M等. A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke[J]. Proceedings - IEEE International Conference on Robotics and Automation, 2018: 2820–2827. DOI:10.1109/ICRA.2018.8461046.
12.^abLEE S, KIM J, BAKER L等. Autonomous multi-joint soft exsosuit with online optimization reduces energy cost of loaded walking[J]. Journal of NeuroEngineering and Rehabilitation, 2018, 15(66): 1–9. DOI:10.1186/s12984-018-0410-y.
13.^abLEE S, KARAVAS N, QUINLIVAN B T等. Autonomous multi-joint soft exosuit for assistance with walking overground[J]. Proceedings - IEEE International Conference on Robotics and Automation, 2018: 2812–2819. DOI:10.1109/ICRA.2018.8460972.
14.^BAE J, MARIA DE ROSSI S M, O’DONNELL K等. A soft exosuit for patients with stroke: Feasibility study with a mobile off-board actuation unit[C/OL]//2015 IEEE International Conference on Rehabilitation Robotics (ICORR). IEEE, 2015: 131–138. https://ieeexplore.ieee.org/document/7281188/. DOI:10.1109/ICORR.2015.7281188.
15.^abDING Y, KIM M, KUINDERSMA S等. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking[J]. Science Robotics, 2018, 3(15): 1–9. DOI:10.1126/scirobotics.aar5438.
16.^abZHAO X, TAN X, ZHANG B. Development of Soft Lower Extremity Exoskeleton and Its Key Technologies: A Survey[J]. Jiqiren/Robot, 2020, 42(3): 365–384. DOI:10.13973/j.cnki.robot.190474.
——完——