Ubuntu16.04利用kalibr工具进行ZED2相机的标定
1.Kalibr安装
参考:https://github.com/ethz-asl/kalibr/wiki/installation
1.安装依赖项
sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev ros-kinetic-vision-opencv ros-kinetic-image-transport-plugins ros-kinetic-cmake-modules python-software-properties software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev 2.创建工作区
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
source /opt/ros/kinetic/setup.bash
catkin init
catkin config --extend /opt/ros/indigo
catkin config --merge-devel # Necessary for catkin_tools >= 0.4. catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release3.下载源码
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/Kalibr.git4.编译
cd ~/kalibr_workspace
catkin build -DCMAKE_BUILD_TYPE=Release -j42.标定ZED2
参考:https://support.stereolabs.com/hc/en-us/articles/360012749113-How-can-I-use-Kalibr-with-the-ZED-Mini-camera-in-ROS-
1.创建文件夹保留所有数据
mkdir ~/zed-kalibr
cd ~/zed-kalibr2.打印标定板https://github.com/ethz-asl/kalibr/wiki/downloads#calibration-targets
在april_6x6_80x80cm.yaml文件中更新实际的方块尺寸。
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.022 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
3.数据记录
启动zed2相机
roslaunch zed_wrapper zed2.launch启用左右摄像头可视化功能,以确保将标定板保持在相机范围内。参考Youtube视频:https://youtu.be/puNXsnrYWTY?t=57
rosrun image_view image_view image:=/zed2/zed_node/left/image_rect_color & rosrun image_view image_view image:=/zed2/zed_node/right/image_rect_color record
rosbag record -O Kalibr_data.bag /zed2/zed_node/imu/data_raw /zed2/zed_node/left/image_rect_color /zed2/zed_node/right/image_rect_color查看记录的数据:
rosbag info Kalibr_data.bag3.获取相机参数
使用以下命令生成相机参数文件
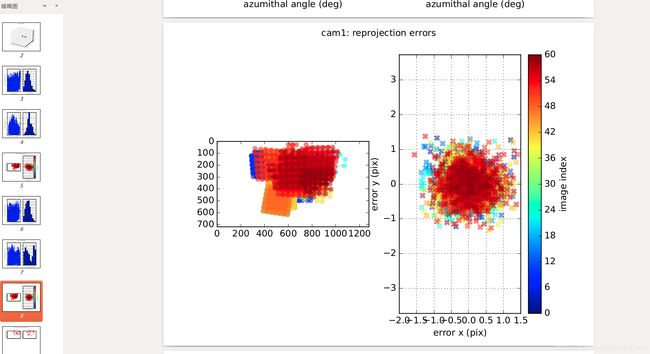
kalibr_calibrate_cameras --bag Kalibr_data.bag --topics /zed2/zed_node/left/image_rect_color /zed2/zed_node/right/image_rect_color --models pinhole-radtan pinhole-radtan --target april_6x6_80x80cm.yaml将会得到camchain-Kalibr_data.yaml和校准结果的完整PDF报告

4.设置IMU参数
创建一个imu-params.yaml文件并填写如下内容
#Accelerometers
accelerometer_noise_density: 1.4e-03 #Noise density (continuous-time)
accelerometer_random_walk: 8.0e-05 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 8.6e-05 #Noise density (continuous-time)
gyroscope_random_walk: 2.2e-06 #Bias random walk
rostopic: /zed2/zed_node/imu/data_raw #the IMU ROS topic
update_rate: 400.0 #Hz (for discretization of the values above)5.相机/IMU标定
kalibr_calibrate_imu_camera --bag Kalibr_data.bag --cam camchain-Kalibr_data.yaml --imu imu-params.yaml --target april_6x6_80x80cm.yaml
结束后将得到camchain-imucam-Kalibr_data.yaml文件和完整的PDF报告。

