【人脸】人脸矫正相关知识
目录
人脸矫正相关知识
一、人脸矫正的简要流程
二、Python代码中人脸矫正实现方式
三、C++代码中人脸矫正实现方式
人脸矫正相关知识
一、人脸矫正的简要流程
Step1、使用人脸检测结果的5个特征点和人脸标准的5个参考特征点坐标求出仿射变换矩阵。
Step2、通过上一步求得的放射变换矩阵对人脸进行旋转平移矫正,得到矫正好的人脸。
补充1.人脸标准的5个参考特征点坐标如下(人脸尺寸为112 * 112):
src = np.array([
[30.2946+8.0, 51.6963],
[65.5318+8.0, 51.5014],
[48.0252+8.0, 71.7366],
[33.5493+8.0, 92.3655],
[62.7299+8.0, 92.2041] ], dtype=np.float32 )
#该特征点坐标是基于112*112尺寸人脸的二、Python代码中人脸矫正实现方式
备注:该方法使用skimage库的transform.SimilarityTransform(),先计算仿射变换矩阵,再使用opencv中的warpAffine()函数矫正人脸图片。
src = np.array([
[30.2946, 51.6963],
[65.5318, 51.5014],
[48.0252, 71.7366],
[33.5493, 92.3655],
[62.7299, 92.2041] ], dtype=np.float32 )
if image_size[1]==112:
src[:,0] += 8.0 #每一行的第0个数据
dst = landmark.astype(np.float32) #astype:数据类型转换
# step1.计算仿射变换举证
tform = trans.SimilarityTransform() #创建一个相似变换对象(这是用到python的skimage库)
tform.estimate(dst, src) # estimate():通过一组对应点估计出变换矩阵
M = tform.params[0:2,:]
# M = trorm.params
# step2.通过仿射变换矩阵对人脸进行矫正
warped = cv2.warpAffine(img,M,(image_size[1],image_size[0]), borderValue = 0.0)
### 这里还看到有一个投影变换的操作方法,不过并未使用该方法
tform3 = trans.ProjectiveTransform()
tform3.estimate(src, dst)
warped = trans.warp(img, tform3, output_shape=_shape)三、C++代码中人脸矫正实现方式
备注:C++中直接使用opencv库函数实现人脸矫正功能。
//pts为人脸检测结果的特征点坐标,anchors是标准参考特征点坐标
///===step1.计算仿射变换矩阵
cv::Mat warp_mat = cv::estimateRigidTransform(pts, anchors, false); //求特征点的仿射变换矩阵
///===step2.通过仿射变换矩阵矫正人脸
cv::warpAffine(imgc, rectifiedImg, warp_mat, cv::Size(112, 112));//对图像的旋转和平移都是通过仿射变换函数cv::warpAffine()来实现的
备注:cvEstimateRigidTransform是opencv中求取仿射变换的函数,该函数会用到ransac算法(从所有特征点中通过迭代的方式选取若干数量的"有效"特征点),然后利用icvGetRTMatrix函数求取仿射变换系数。
ransac算法简要介绍:
ransac算法能够解决全部的数据中存在错误数据的情况,现实中我们的数据可能会存在错误的数据(标注错误等等),这些数据会影响模型拟合,ransac算法随机选取数据中的一部分进行迭代,有较大概率能够避开错误数据的干扰。
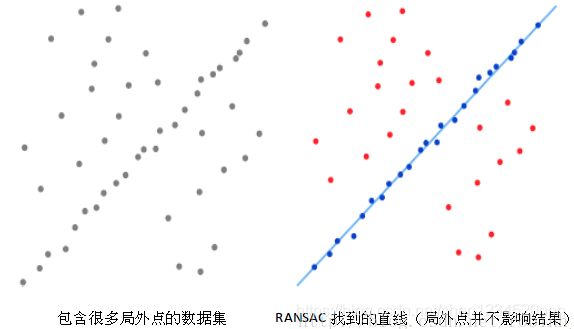
RANSAC算法通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.首先我们先随机假设一小组局内点为初始值。然后用此局内点拟合一个模型。(此模型适应于假设的局内点,所有的未知参数都能从假设的局内点计算得出)。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点,将局内点扩充。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为此模型仅仅是在初始的假设的局内点估计的,后续有扩充后,需要更新。
5.最后,通过估计局内点与模型的错误率来评估模型。
整个这个过程为迭代一次,此过程被重复执行固定的次数,每次产生的模型有两个结局:
1、要么因为局内点太少,还不如上一次的模型,而被舍弃,
2、要么因为比现有的模型更好而被选用。
参考链接:https://blog.csdn.net/robinhjwy/article/details/79174914
下面还有一个第三方实现的仿射变换矩阵计算方法:(来源:https://blog.csdn.net/u011956147/article/details/90294249)
float default[5][2] = {
{30.2946f+8.0f, 51.6963f},
{65.5318f+8.0f, 51.5014f},
{48.0252f+8.0f, 71.7366f},
{33.5493f+8.0f, 92.3655f},
{62.7299f+8.0f, 92.2041f}
}; // +8.0f for 112*112
float detect[5][2] = {
{30.2946f, 51.6963f},
{65.5318f, 51.5014f},
{48.0252f, 71.7366f},
{33.5493f, 92.3655f},
{62.7299f, 92.2041f}
}; //
cv::Mat src(5,2,CV_32FC1, default);
memcpy(src.data, default, 2 * 5 * sizeof(float));
cv::Mat dst(5,2,CV_32FC1, detect);
memcpy(dst.data, detect, 2 * 5 * sizeof(float));
cv::Mat M = FacePreprocess::similarTransform(dst, src); // skimage.transform.SimilarityTransform
cv::Mat warpImg;
//cv::warpAffine(input, warpImg, M, cv::Size(112, 112));
cv::warpPerspective(inpu, croppedMat, M, cv::Size(112, 112));
namespace FacePreprocess {
cv::Mat meanAxis0(const cv::Mat &src)
{
int num = src.rows;
int dim = src.cols;
// x1 y1
// x2 y2
cv::Mat output(1,dim,CV_32F);
for(int i = 0 ; i < dim; i ++)
{
float sum = 0 ;
for(int j = 0 ; j < num ; j++)
{
sum+=src.at(j,i);
}
output.at(0,i) = sum/num;
}
return output;
}
cv::Mat elementwiseMinus(const cv::Mat &A,const cv::Mat &B)
{
cv::Mat output(A.rows,A.cols,A.type());
assert(B.cols == A.cols);
if(B.cols == A.cols)
{
for(int i = 0 ; i < A.rows; i ++)
{
for(int j = 0 ; j < B.cols; j++)
{
output.at(i,j) = A.at(i,j) - B.at(0,j);
}
}
}
return output;
}
cv::Mat varAxis0(const cv::Mat &src)
{
cv::Mat temp_ = elementwiseMinus(src,meanAxis0(src));
cv::multiply(temp_ ,temp_ ,temp_ );
return meanAxis0(temp_);
}
int MatrixRank(cv::Mat M)
{
cv::Mat w, u, vt;
cv::SVD::compute(M, w, u, vt);
cv::Mat1b nonZeroSingularValues = w > 0.0001;
int rank = countNonZero(nonZeroSingularValues);
return rank;
}
// References
// ----------
// .. [1] "Least-squares estimation of transformation parameters between two
// point patterns", Shinji Umeyama, PAMI 1991, DOI: 10.1109/34.88573
//
// """
//
// Anthor:Jack Yu
cv::Mat similarTransform(cv::Mat src,cv::Mat dst) {
int num = src.rows;
int dim = src.cols;
cv::Mat src_mean = meanAxis0(src);
cv::Mat dst_mean = meanAxis0(dst);
cv::Mat src_demean = elementwiseMinus(src, src_mean);
cv::Mat dst_demean = elementwiseMinus(dst, dst_mean);
cv::Mat A = (dst_demean.t() * src_demean) / static_cast(num);
cv::Mat d(dim, 1, CV_32F);
d.setTo(1.0f);
if (cv::determinant(A) < 0) {
d.at(dim - 1, 0) = -1;
}
cv::Mat T = cv::Mat::eye(dim + 1, dim + 1, CV_32F);
cv::Mat U, S, V;
cv::SVD::compute(A, S,U, V);
// the SVD function in opencv differ from scipy .
int rank = MatrixRank(A);
if (rank == 0) {
assert(rank == 0);
} else if (rank == dim - 1) {
if (cv::determinant(U) * cv::determinant(V) > 0) {
T.rowRange(0, dim).colRange(0, dim) = U * V;
} else {
// s = d[dim - 1]
// d[dim - 1] = -1
// T[:dim, :dim] = np.dot(U, np.dot(np.diag(d), V))
// d[dim - 1] = s
int s = d.at(dim - 1, 0) = -1;
d.at(dim - 1, 0) = -1;
T.rowRange(0, dim).colRange(0, dim) = U * V;
cv::Mat diag_ = cv::Mat::diag(d);
cv::Mat twp = diag_*V; //np.dot(np.diag(d), V.T)
cv::Mat B = cv::Mat::zeros(3, 3, CV_8UC1);
cv::Mat C = B.diag(0);
T.rowRange(0, dim).colRange(0, dim) = U* twp;
d.at(dim - 1, 0) = s;
}
}
else{
cv::Mat diag_ = cv::Mat::diag(d);
cv::Mat twp = diag_*V.t(); //np.dot(np.diag(d), V.T)
cv::Mat res = U* twp; // U
T.rowRange(0, dim).colRange(0, dim) = -U.t()* twp;
}
cv::Mat var_ = varAxis0(src_demean);
float val = cv::sum(var_).val[0];
cv::Mat res;
cv::multiply(d,S,res);
float scale = 1.0/val*cv::sum(res).val[0];
T.rowRange(0, dim).colRange(0, dim) = - T.rowRange(0, dim).colRange(0, dim).t();
cv::Mat temp1 = T.rowRange(0, dim).colRange(0, dim); // T[:dim, :dim]
cv::Mat temp2 = src_mean.t(); //src_mean.T
cv::Mat temp3 = temp1*temp2; // np.dot(T[:dim, :dim], src_mean.T)
cv::Mat temp4 = scale*temp3;
T.rowRange(0, dim).colRange(dim, dim+1)= -(temp4 - dst_mean.t()) ;
T.rowRange(0, dim).colRange(0, dim) *= scale;
return T;
}
}