ROS话题通信、服务通信编程
ROS话题通信、服务通信编程
- ros的工作空间
-
-
- 创建工作空间
- 编译工作空间
- 环境变量设置
-
- 功能包
-
-
- 创建功能包
- 编译功能包
-
- ROS通信编程
-
- 1.话题编程
-
- 自定义话题消息
- 2.服务编程
ros的工作空间
主要是一些存放工程开发相关文件的文件夹,其中主要包括src,build,devel,install文件夹。
其中:
src:代码空间(Source Space )
build:编译空间(Build Space)
devel:开发空间(Development Space)
install:安装空间(Install Space)
创建工作空间
创建工作空间是第一步,只有先创建好工作空间,后面的工作才能很好的执行
mkdir -p ~/catkin_ws/src#创建文件夹
cd ~/catkin_ws/src#进入目录
catkin_init_workspace#初始化,使其成为ROS的工作空间

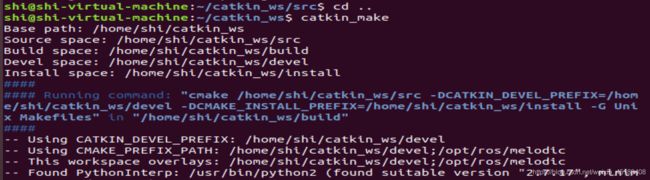
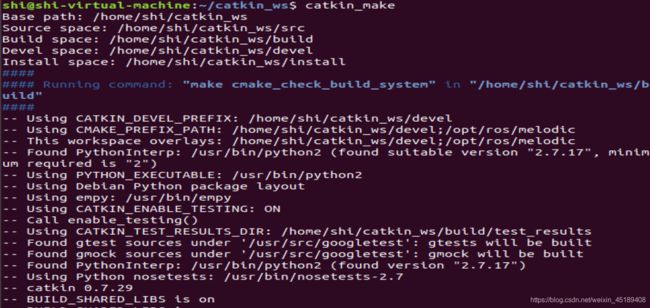
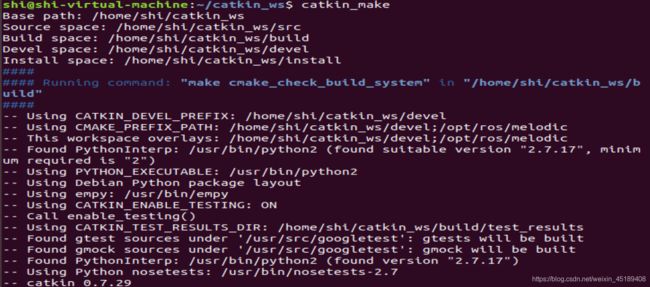
编译工作空间
cd ..
catkin_make
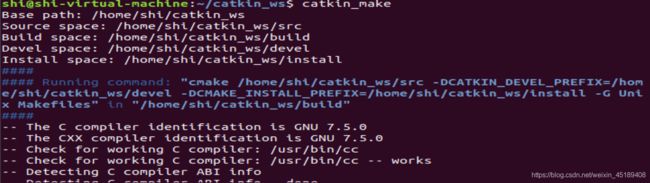
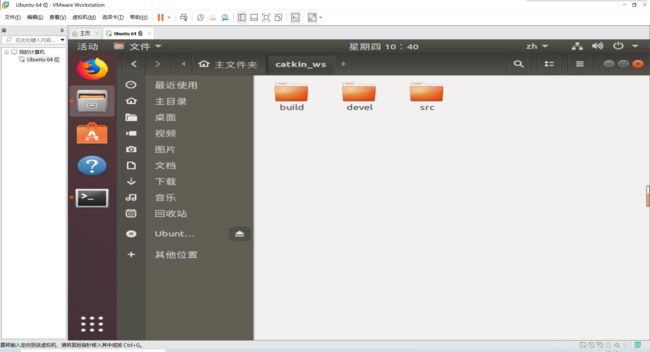
可以看到,在目录下自动生成了两个文件build、devel
环境变量设置
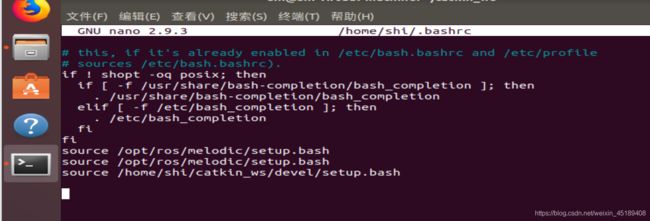
source /home/shi/catkin_ws/devel/setup.bash#该环境变量设置只对当前终端有效,shi是用户名
#将上面命令放置到~/.bashrc文件中,让其对所有终端都有效
sudo nano ~/.bashrc
![]()
检查环境变量
echo $ROS_PACKAGE_PATH
![]()
到此,工作空间环境就弄好了
功能包
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp
#catkin_create_pkg 功能包名字 依赖
#std_msgs:定义的标准的数据结构
#rospy:提供python编程接口
#roscpp:提供c++编程接口

编译功能包
cd ~/catkin_ws
catkin_make
注意,在同一个工作空间,不能有相同名字的包
ROS通信编程
准备工作做完了,开始进入正题
1.话题编程
步骤:
1.创建发布者
1)初始化ROS节点
2)向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
3)按照一定频率循环发布消息
2.创建订阅者
1)初始化ROS节点
2)订阅需要的话题
3)循环等待话题消息,接受到消息后进行回调函数
4)回调函数中完成消息处理
3. 添加编译选项
1)设置需要编译的代码和生成的可执行文件
2)设置链接库
3)设置依赖
4.运行可执行程序
创建cpp文件
gedit talker.cpp
gedit listener.cpp
talker.cpp
#includelistener.cpp
#include"ros/ros.h"
#include"std_msgs/String.h"
//接收到订阅的消息,会进入消息的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//将接收到的消息打印处理
ROS_INFO("I heard:{%s}",msg->data.c_str());
}
int main(int argc,char **argv)
{
//初始化ROS节点
ros::init(argc,argv,"listener");
//创建节点句柄
ros::NodeHandle n;
//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);
//循环等待回调函数
ros::spin();
return 0;
}
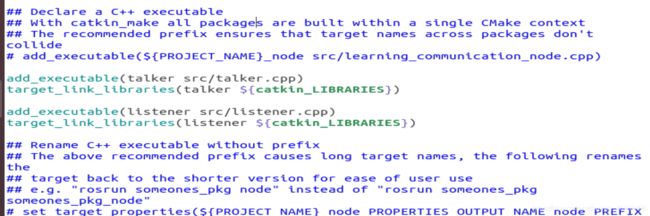
设置CMakeLists.txt文件
加入以下代码
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
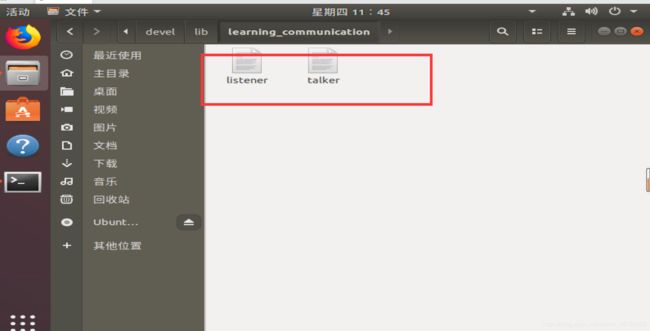
编译

查看生成的可执行文件
运行
roscore
rosrun learning_communication talker
rosrun learning_communication listener
出现“[rospack]Error:package ‘learning_communication’ not found”错误
解决方法:
sudo gedit ~/.bashrc
在末尾添加source /home/xxx/catkin_ws/devel/setup.bash
这里xxx指的是自己的用户名
自定义话题消息
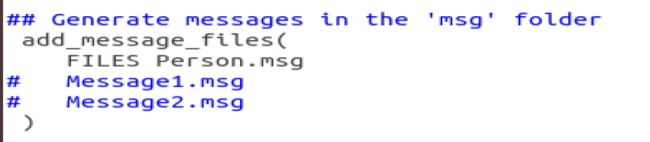
定义msg文件
mkdir ~/catkin_ws/src/learning_communication/msg
sudo nano Person.msg
Person.msg(注意,该文件的权限如果是只读的话,可能会出错)
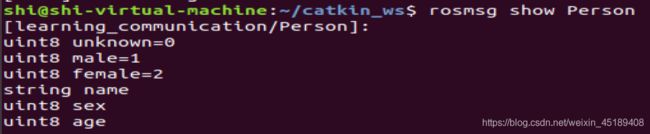
string name
uint8 sex
uint8 age
uint8 unknown=0
uint8 male=1
uint8 female=2
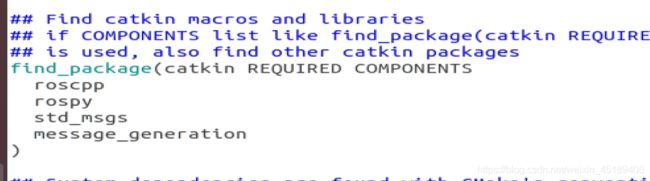
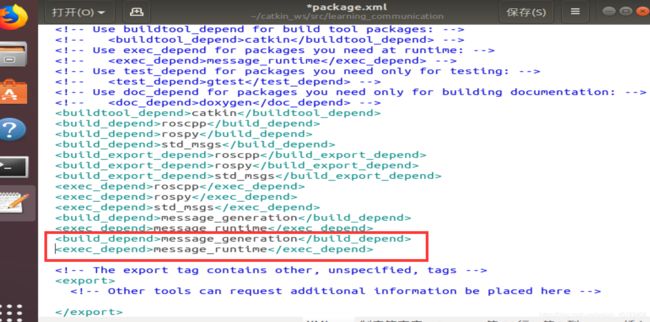
在package.xml中添加功能包依赖
message_generation
message_runtime


编译
查看自定义消息
rosmsg show Person
2.服务编程
定义服务请求与应答的方式
1.定义srv文件
mkdir ~/catkin_ws/src/learning_communication/srv
sudo nano AddTwoInts.srv
AddTwoInts.srv
int64 a
int64 b
---
int64 sum

2.在package.xml中添加功能包依赖
message_generation
message_runtime
3.在CMakeLists.txt添加编译选项

步骤:
创建服务器
- 初始化ROS节点
- 创建Serve实例
- 循环等待服务请求,进入回调函数
- 在回调函数中完成服务功能的处理,并反馈应答数据
创建客户端
- 初始化ROS节点
- 创建一个Client实例
- 发布服务请求数据
- 等待Serve处理之后的应答结果
添加编译选项
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
- 设置依赖
运行可执行程序
在src 里创建cpp文件
gedit server.cpp
gedit client.cpp
server.cpp
#includeclient.cpp
#include设置CMakeLists.txt文件
查看生成的可执行文件

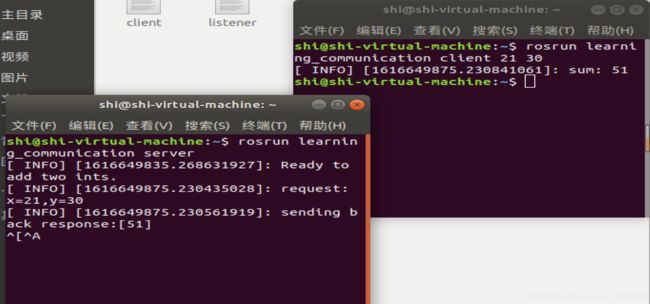
运行可执行文件
先运行server,再运行client
roscore
rosrun learning_communication server
rosrun learning_communication client 整数1 整数2