遥感影像语义分割数据集
遥感图像语义分割数据集
文章目录
- 遥感图像语义分割数据集
-
- 1.建筑
-
- 1.1 Aerial Image Segmentation Dataset
- 1.2 INRIA aerial image dataset
- 1.3 WHU Building Dataset
- 1.4 Massachusetts Buildings Dataset
- 1.5 2020数字中国创新大赛—应用赛1:建筑智能普查
- 1.6 SpaceNet Buildings Dataset
- 1.7 AIRS
- 2.道路
-
- 2.1 Massachusetts Roads Dataset
- 2.2 ERM-PAIW
- 2.3 DeepGlobe Road Detection Challenge
- 2.4 “华为云杯”2020人工智能创新应用大赛
- 3.水体
-
- 3.1 BH-DATASET
- 3.2 高分辨率可见光图像水体目标自动提取
- 4.云
-
- 4.1 38-Cloud dataset
- 4.2 95-Cloud
- 4.3 Landsat 8 Cloud Cover Assessment Validation Data
- 5.多类
-
- 5.1 GID
- 5.2 ISPRS
- 5.3 2017 IEEE GRSS Data Fusion Contest
- 5.4 2018 IEEE GRSS Data Fusion Contest
- 5.5 EvLab-SS Dataset
- 5.6 DeepGlobe Land cover Classification challenge
- 5.7 Aeroscapes
- 5.8 SEN12MS
- 5.9 Zurich Summer Dataset
- 5.10 DLRSD
- 5.11 WHDLD
- 5.12 HD-Maps
- 5.13 BDCI 2017
- 5.14 Map Challenge
- 5.15 UAVid
- 5.16 “华为・昇腾杯”AI+遥感影像
- 5.17 遥感影像地块分割(CCF BDCI)
- 5.18 rscup
- 5.19 Segmantic Drone Dataset
- 5.20 2021全国数字生态创新大赛-智能算法赛
- 5.21 Slovenia 2017 Land Cover Classification Dataset
- 5.22 Dstl Satellite Imagery Feature Detection
- 5.23 2019 年县域农业大脑AI挑战赛
- 6.其他
-
- 6.1 SAID
- 6.2 Agriculture-Vision
- 6.3 HistAerialDataset
- 6.4 第二届中国“高分杯”美丽乡村大赛
- 6.5 滑坡
1.建筑
1.1 Aerial Image Segmentation Dataset
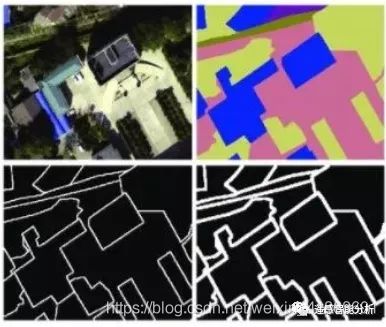
该航空图像分为来自谷歌地图的航空遥感图像和来自OpenStreetMap的像素级的建筑、道路和背景标签。覆盖区域为柏林、芝加哥、巴黎、波茨坦和苏黎世。地物真实图像包括一张来自谷歌地图的东京地区航空图像,以及手动生成的、像素级的建筑、道路和背景标签。像素级标签以RGB顺序作为PNG图像提供,标记为建筑物、道路和背景的像素由RGB颜色[255,0,0]、[0,0,255]和[255,255,255]表示。

地址:https://zenodo.org/record/1154821#.XH6HtygzbIU
1.2 INRIA aerial image dataset
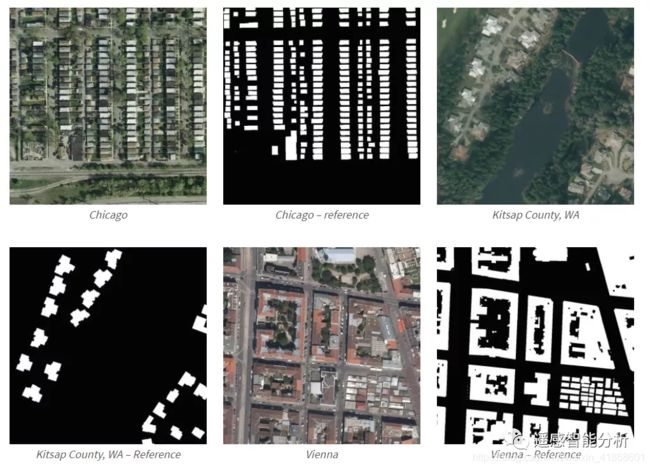
地址:https://project.inria.fr/aerialimagelabeling/download/
1.3 WHU Building Dataset
地址:https://study.rsgis.whu.edu.cn/pages/download/building_dataset.html
1.4 Massachusetts Buildings Dataset
地址:https://www.cs.toronto.edu/~vmnih/data/
链接:https://pan.baidu.com/s/1w09JYGNyLOEENmdEFXngog
提取码:RSAI
1.5 2020数字中国创新大赛—应用赛1:建筑智能普查
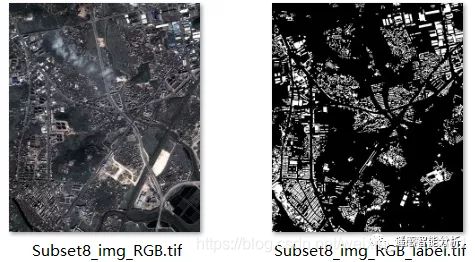
本赛事由福建省有关部门挑选出16个具有代表性的实验区,包含城市、乡镇、农村等多种不同的人居环境和土地利用场景,每个实验区覆盖12平方公里左右的面积。对于每个实验区,选取没有云雾遮挡的中国高分二号卫星遥感影像,并对其多光谱波段和全色波段进行影像融合,提供0.8m真彩色RGB影像作为比赛的原始数据,不做拉伸处理,以8-bit的tiff文件格式存储。通过人工解译的方式勾绘出每幅实验影像中所有的建筑物轮廓多边形,并存为二值化tiff文件格式,其中1代表建筑物区域,0代表非建筑物区域。赛事开始时,提供给参赛选手8幅标注好的建筑物数据作为训练集,其余8幅影像做为测试集,其中5幅影像作为A榜公开测试集,另外3幅作为B榜非公开测试集,影像数据不公开。
地址:https://tianchi.aliyun.com/competition/entrance/231767/information
1.6 SpaceNet Buildings Dataset
参考:https://blog.csdn.net/dou3516/article/details/105123413
1.7 AIRS
AIRS(用于屋顶分割的航空影像)是一个公共数据集,旨在对来自超高分辨率航空影像的屋顶分割算法进行基准测试。 AIRS的主要特征可以概括为:
457平方公里的正射影像图像覆盖超过220,000座建筑物
图像的极高空间分辨率(0.075m)
严格符合屋顶轮廓的精致地面真相
AIRS数据集几乎覆盖了新西兰南岛最大的城市基督城的整个区域。该照片是在2015年和2016年的飞行季节拍摄的,提供的图像是经过矫正的DOM,具有RGB通道和7.5cm的分辨率(在新西兰横轴墨卡托投影中)。整个区域内有226,342座标有建筑物的建筑物可供实验。为了消除救济位移的影响,对建筑物的地面基本要素进行了精心设计,使其与屋顶对齐。因此,为AIRS提出的分割任务包含两个语义类:屋顶像素和非屋顶像素。
地址:https://www.airs-dataset.com/
2.道路
2.1 Massachusetts Roads Dataset
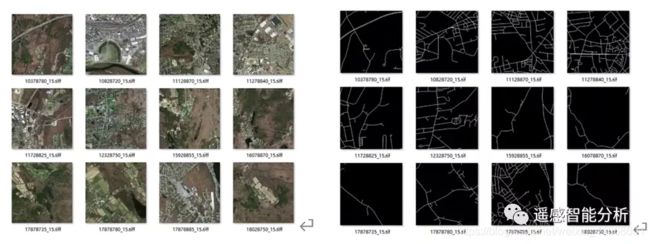
马萨诸州道路数据(Massachusetts Roads Dataset),该数据集包含高分辨率影像和对应的真实道路标签,涵盖了城市、郊区等复杂地物信息,划分好了训练集(Training set)、验证集(Validation Set)、测试集(Test Set)。该数据由同一传感器拍摄获得的影像,成像质量一致。分辨率为1.2米,每张影像像素尺寸为1500*1500。
地址:https://www.cs.toronto.edu/~vmnih/data/
链接:https://pan.baidu.com/s/1lOLZGqhBZmDVrD-SfPfCig
提取码:RSAI
2.2 ERM-PAIW

地址:https://www.dlr.de/eoc/en/desktopdefault.aspx/tabid-12760/22294_read-52776
2.3 DeepGlobe Road Detection Challenge
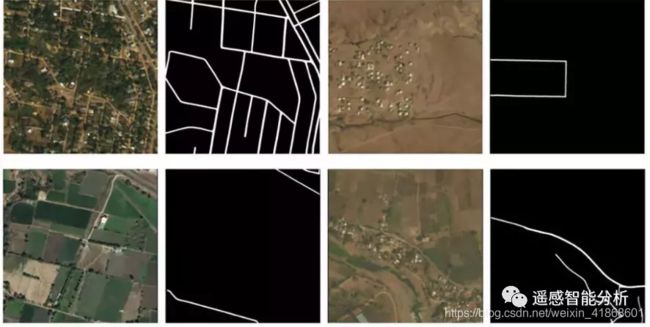
数据集包含6226张训练图像,1243张验证图像,以及1101张测试图像。所有的图像尺寸均为1024*1024,图像来源于泰国、印度、印度尼西亚,图像场景包括城市、乡村、荒郊、海滨、热带雨林等多个场景。
地址:http://deepglobe.org/challenge.html
链接:https://pan.baidu.com/s/1pTCBOsrZ2XJq479FAfcFNg
提取码:RSAI
2.4 “华为云杯”2020人工智能创新应用大赛
大赛数据集来源于北京二号卫星,空间分辨率为0.8米,分为训练集和测试集2个数据集,分别包含3景遥感影像,其中训练集2景影像的尺寸分别为40391X33106、34612X29810。
地址:https://competition.huaweicloud.com/information/1000041322/introduction
3.水体
3.1 BH-DATASET
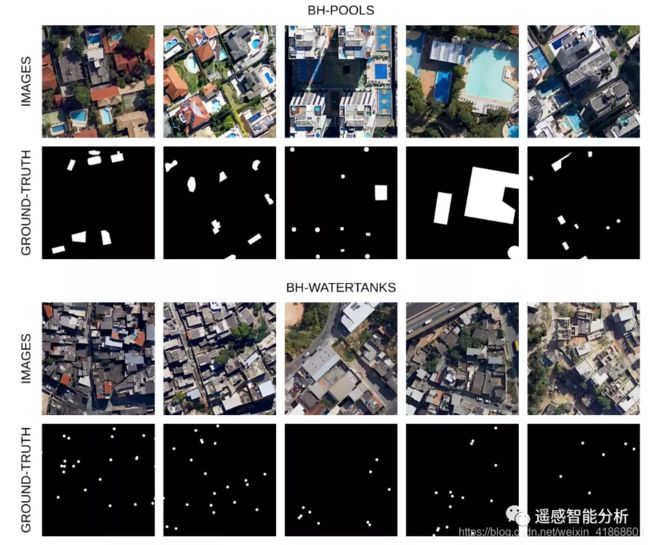
BH-pools和BH-watertanks,分别带有注释的游泳池和水箱。 这两个数据集均包含来自巴西米纳斯吉拉斯州贝洛奥里藏特市几个街区的图像。 数据是通过Google Earth Pro工具获取的。 图像是从330米的眼睛高度以3840x2160(4K)的分辨率导出的,并且图像带是三个可见的带:红色,绿色和蓝色。 对于在图像上发现的目标对象的每次出现,都绘制了一个多边形以生成实例的分割蒙版。
BH-Pools数据集包含8个不同邻域的200张4K图像(每个图像25张),并包含3980个带注释的池。 BH-WaterTanks数据集由6个邻里的150张4K图像组成(每个图像25张),并包含16216个带注释的水箱。
地址:http://www.patreo.dcc.ufmg.br/2020/07/29/bh-pools-watertanks-datasets/
链接:https://pan.baidu.com/s/1_GwnpR8kNTnztUEbC4x48w
提取码:RSAI
3.2 高分辨率可见光图像水体目标自动提取
高分二号光学数据,分辨率1m-4m。每幅图像按照像素级别进行了水体的像素级标注

地址:http://sw.chreos.org/competitionlist
4.云
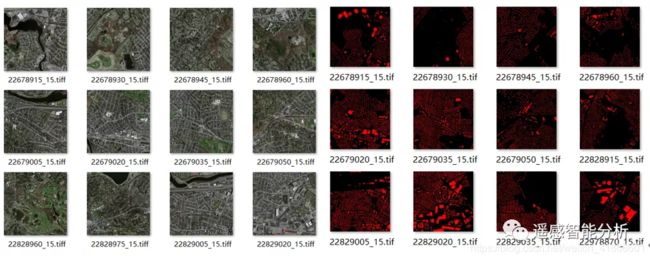
4.1 38-Cloud dataset
该数据集包含38幅Landsat 8 场景图像及其手动提取的像素级地物真实标签,用于云检测。这些场景的整个图像被裁剪成384×384个斑块,以适合于基于深度学习的语义分割算法。数据集被划分为8400个斑块进行训练,9201个补丁进行测试。每幅图像有4个相应的波段,分别是红色(波段4)、绿色(波段3)、蓝色(波段2)和近红外(波段5)。

地址:https://github.com/SorourMo/38-Cloud-A-Cloud-Segmentation-Dataset
4.2 95-Cloud
95云数据集是之前38云数据集的扩展。 95-Cloud还有57个用于“培训”的Landsat 8场景
地址:https://github.com/SorourMo/95-Cloud-An-Extension-to-38-Cloud-Dataset
地址:https://www.kaggle.com/sorour/95cloud-cloud-segmentation-on-satellite-images?select=95-cloud_training_only_additional_to38-cloud
4.3 Landsat 8 Cloud Cover Assessment Validation Data
地址:https://landsat.usgs.gov/landsat-8-cloud-cover-assessment-validation-data
5.多类
5.1 GID
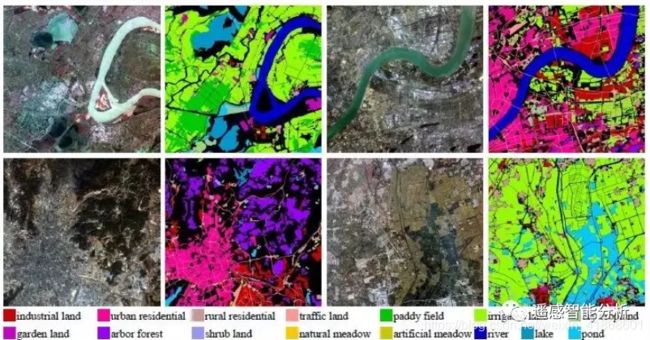
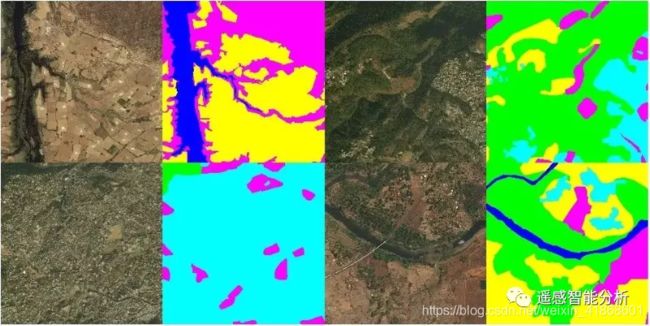
Gaofen Image Dataset(GID)是一个用于土地利用和土地覆盖(LULC)分类的大型数据集。它包含来自中国60多个不同城市的150幅高质量高分二号(GF-2)图像,这些图像覆盖的地理区域超过了5万km²。GID图像具有较高的类内多样性和较低的类间可分离性。GF-2是高清晰度地球观测系统(HDEOS)的第二颗卫星。GF-2卫星包括了空间分辨率为1 m的全色图像和4 m的多光谱图像,图像大小为6908×7300像素。多光谱提供了蓝色、绿色、红色和近红外波段的图像。自2014年启动以来,GF-2已被用于土地调查、环境监测、作物估算、建设规划等重要应用。
地址:http://captain.whu.edu.cn/GID/
https://x-ytong.github.io/project/GID.html
5.2 ISPRS
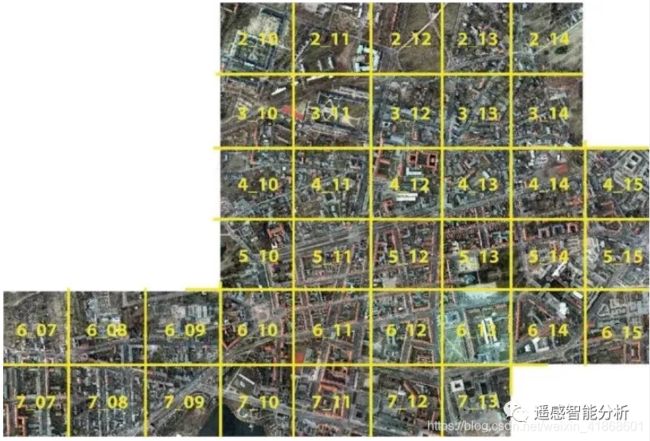
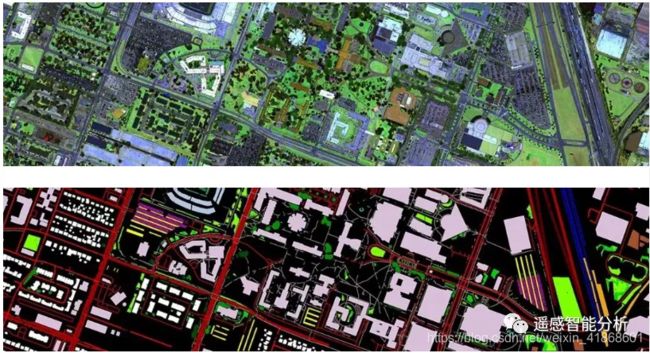
SPRS提供了城市分类和三维建筑重建测试项目的两个最先进的机载图像数据集。该数据集采用了由高分辨率正交照片和相应的密集图像匹配技术产生的数字地表模型(DSM)。这两个数据集区域都涵盖了城市场景。Vaihingen是一个相对较小的村庄,有许多独立的建筑和小的多层建筑;Postdam是一个典型的历史城市,有着大的建筑群、狭窄的街道和密集的聚落结构。每个数据集已手动分类为6个最常见的土地覆盖类别。
①不透水面 (RGB: 255, 255, 255)
②建筑物(RGB: 0, 0, 255)
③低矮植被 (RGB: 0, 255, 255)
④树木 (RGB: 0, 255, 0)
⑤汽车(RGB: 255, 255, 0)
⑥背景 (RGB: 255, 0, 0)
背景类包括水体和与其他已定义类别不同的物体(例如容器、网球场、游泳池),这些物体通常属于城市场景中的不感兴趣的语义对象。
地址:http://www2.isprs.org/commissions/comm3/wg4/semantic-labeling.html
链接:https://pan.baidu.com/s/1RbxJZu5EfWEVaCZ8PAp7ww
提取码:RSAI
5.3 2017 IEEE GRSS Data Fusion Contest
2017年IEEE GRSS数据融合竞赛采用分类作为主体。要执行的任务是对各种城市环境中的土地使用(即针对2012年地方气候区(LCZ))进行分类。竞赛选择了几个城市来测试LCZ预测在世界各地推广的能力。输入数据为多时相、多源和多模态,包括图像和语义层。
数据集由4个部分组成。
美国地质调查局提供的的地面卫星数据:包含可见光、短波和长波红外在内的8个多光谱波段,并以100 m分辨率重采样的;
哨兵2图像:该图像空间分辨率为100 m,拥有9个多光谱波段即可见光、近红外和短红外波长(包含修改的哥白尼数据2016);
辅助数据:开放街道图(OSM)层,具有土地利用信息:建筑、自然、道路和其他土地利用区域。其中还为建筑和土地使用区域提供分辨率为20 m的OSM层的栅格地图,可与卫星图像叠加。
此外,对于选取的城市,还提供了城市几个地区的各种LCZ类的地面真实标签。标签为100 m分辨率的栅格图像,也可叠加到卫星图像上。

地址:http://www.grss-ieee.org/2017-ieee-grss-data-fusion-contest/http://dase.ticinumaerospace.com/index.php
5.4 2018 IEEE GRSS Data Fusion Contest
数据是由NCALM于2017年2月16日在16:31至18:18 GMT之间从国家机载激光测绘中心获得的。在这场比赛中使用数据收集的传感器包括:有3个不同波段的激光雷达传感器OPTech TITAM M(14sen/con340)、具有70 mm焦距的高分辨率的彩色成像仪Dimac ULTRALIGHT+、高光谱成像仪ITRES CASI 1500。多光谱激光雷达点云数据波段在1550 nm,1064 nm和532 nm。高光谱数据覆盖范围为380—1050 nm,共有48个波段,空间分辨率为1 m。高分辨率RGB遥感图像的空间分辨率为5 cm,被分割成几个单独的图片。
地址:http://www.grss-ieee.org/community/technical-committees/data-fusion/2018-ieee-grss-data-fusion-contest/
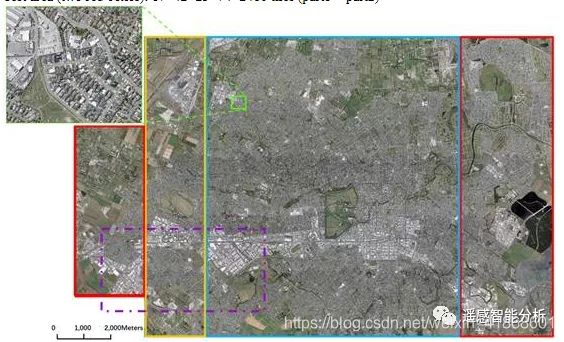
5.5 EvLab-SS Dataset
EvLab-SS数据集用于评估真实工程场景上的语义分割算法,旨在为遥感领域的高分辨率像素级分类任务寻找一种良好的深度学习架构。
数据集来源于中国地理条件调查和绘图项目,每幅图像都有地理条件调查的完整注释。数据集的平均大小约为4500×4500像素。EvLab-SS数据集包含11个大类,分别是背景、农田、花园、林地、草地、建筑、道路、构筑物、挖孔桩、沙漠和水域,目前包括由不同平台和传感器拍摄的60幅图像。
该数据集包括35幅卫星图像,其中19幅由World-View-2卫星采集,5幅由GeoEye卫星采集,5幅由Quick Bird卫星采集,6幅由GF-2卫星采集。该数据集还有25幅航空图像,其中10幅图像的空间分辨率为0.25 m,15幅图像的空间分辨率为0.1 m。
地址:http://earthvisionlab.whu.edu.cn/zm/SemanticSegmentation/index.html
5.6 DeepGlobe Land cover Classification challenge
DeepGlobe Land Cover Classification Challenge是一个公共数据集,提供高分辨率亚米卫星图像,重点是农村地区。由于土地覆盖类型的多样性和注释的高密度,该数据集很具挑战性。该数据集共包含10146幅卫星图像,大小为20448×20448像素,分为训练/验证/测试集,每组图像为803/171/172幅(对应70%/15%/15%)。
地址:http://deepglobe.org/index.html
https://competitions.codalab.org/competitions/18468
链接:https://pan.baidu.com/s/1jiadeSAxbOKTdlTyDAyrlQ
提取码:RSAI
5.7 Aeroscapes
空中语义分割数据集包括使用商业无人机从5到50 m高度范围内捕获的图像。该数据集为11个类提供了3269幅720 p图像和地表真实标签。

地址:https://github.com/ishann/aeroscapes
链接:https://pan.baidu.com/s/1sqx1xEkDc5zUGqpDU6jo4w
提取码:RSAI
5.8 SEN12MS
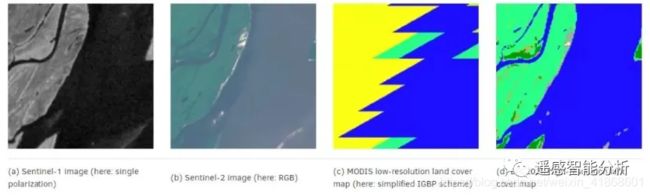
SEN12MS是由180748张相应的3种类型遥感数据组成的一个数据集,包括了Sentinel-1双极化SAR数据,Sentinel-2多光谱图像和MODIS土地覆盖图。其中Sentinel-1图像分辨率为20 m,Sentinel-2多光谱图像分辨率为10 m,波段数为13,MODIS的土地覆盖的图像分辨率为500 m。
地址:https://mediatum.ub.tum.de/1474000
5.9 Zurich Summer Dataset
该数据是从2002年8月从QuickBird收购瑞士苏黎世市获得的。QuickBird图像由4个通道(NIR-RGB)组成,分别是 锐化至GSD约0.62 cm的PAN分辨率。 我们手动注释了8种不同的城市和城市郊区类别:道路,建筑物,树木,草木,裸露的土壤,水,铁路和游泳池。 类样本的累积数量高度不平衡,以反映现实情况。 请注意,注释不是完美的,也不是超密集的(并非对每个像素都进行注释),并且可能还会出现一些错误。 我们通过联合选择超像素(SLIC)和绘制(徒手绘制)区域来进行注释,我们可以放心地分配对象类。

地址:https://sites.google.com/site/michelevolpiresearch/data/zurich-dataset
链接:https://pan.baidu.com/s/1P8QQROYnONcK3thIhjgKzQ
提取码:RSAI
5.10 DLRSD
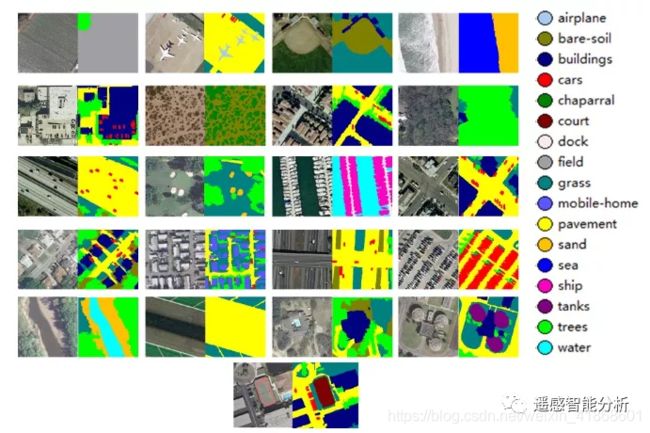
DLRSD [1]是一个密集的标签数据集,可用于多标签任务,如遥感图像检索(RSIR)和分类,以及其他基于像素的任务,如语义分割(在遥感中也称为分类)。 DLRSD共有21个大类,每个类100个图像,与UC Merced存档相同。我们在UC Merced档案库中使用以下17类标签标记了每个图像的像素,即飞机,裸土,建筑物,汽车,丛林法院,码头,田野,草地,活动房屋,人行道,沙子,大海,船,坦克,树木和水。首先在多标签RSIR存档[2]中构造和定义这17个类别标签,其中UC Merced存档中的每个图像都提供了一组多个标签。在DLRSD的标记过程中,我们改进了一些我们认为通过视觉检查标记不正确的多标记[2],然后使用/引用了修订的多标记来手动标记每个图像的像素。因此,DLRSD是UC Merced存档特别是多标签RSIR存档的扩展。
UC Merced档案库中某些图像的大小不完全如其说明的256 * 256像素。在标记像素之前,我们将这些图像的大小调整为256 * 256。
地址:https://sites.google.com/view/zhouwx/dataset#h.p_hQS2jYeaFpV0
链接:https://pan.baidu.com/s/1Vhxrl7s9dHGZ3OH41VIPUw
提取码:RSAI
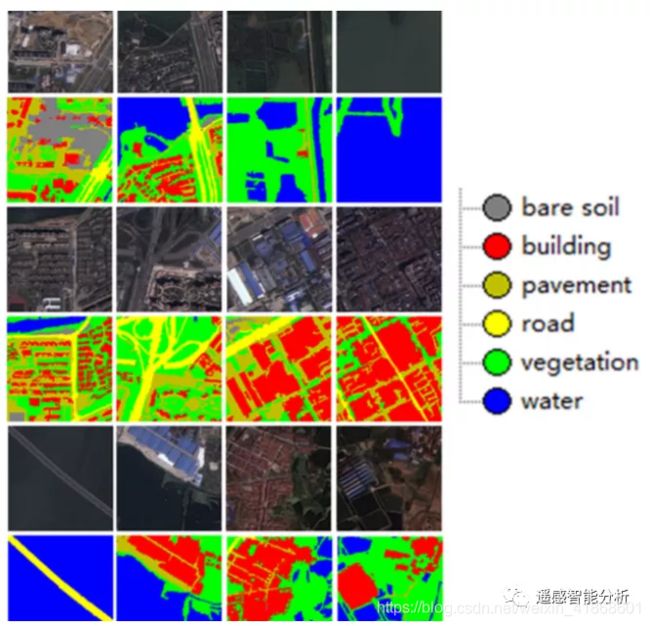
5.11 WHDLD
WHDLD是一个密集的标签数据集,可用于多标签任务,例如遥感图像检索(RSIR)和分类,以及其他基于像素的任务,例如语义分割(在遥感中也称为分类)。 我们使用以下6个类别标签标记每个图像的像素,即建筑物,道路,人行道,植被,裸露的土壤和水。
地址:https://sites.google.com/view/zhouwx/dataset#h.p_hQS2jYeaFpV0
链接:https://pan.baidu.com/s/1DUWkwjFxdtlMfVyvZsdUMw
提取码:RSAI
5.12 HD-Maps
包含4中类型的遥感第五类型,street,parking lane,walking path,buildings,background

地址:https://www.dlr.de/eoc/en/desktopdefault.aspx/tabid-12760/22294_read-52773
链接:https://pan.baidu.com/s/1QfC4SZmZP5P7sQiE6Uk2FA
提取码:RSAI
5.13 BDCI 2017
2015年某地区的高分辨率遥感影像,包括基于该遥感影像目视解译出来的地表覆盖样本数据。中国南方某地区的高分辨率遥感影像。
影像的空间分辨率为亚米级,光谱为可见光波段(R,G,B),已去除坐标信息;训练影像为train1.png、train2.png和train3.png;
对应的标注数据为train1_labels_8bits.png、train2_labels_8bits.png和train3_labels_8bits.png。
五类:植被(标记1)、建筑(标记2)、水体(标记3)、道路(标记4)以及其他(标记0)。其中,耕地、林地、草地均归为植被类。影像收集的时间跨度从4月到8月,地表的变化较大。部分耕地和林地处于收获或砍伐后的状态,均被划为植被类。
地址:https://www.datafountain.cn/competitions/270/datasets
链接:https://pan.baidu.com/s/1mEOLuOsEsOO7YGK-0SnIbA
提取码:RSAI
5.14 Map Challenge

地址:https://www.crowdai.org/challenges/mapping-challenge
链接:https://pan.baidu.com/s/16RaVoWA1LjeJa0kMr741Fw
提取码:RSAI
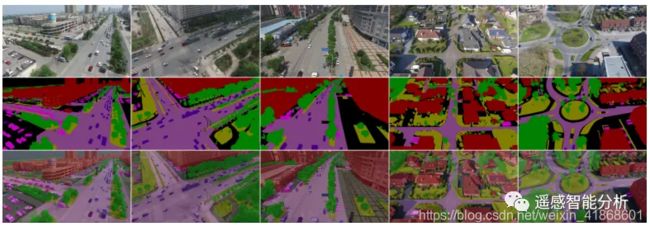
5.15 UAVid
无人机数据,包含8类地物类型,图像尺寸为4096 * 2160 * 3 3840*22160 * 3 数量是300,包括:
building,road,static car,tree,human,moving car,background clutter
地址:https://www.uavid.nl/
链接:https://pan.baidu.com/s/1L8OAegePAHFzin6x6inQMw
提取码:RSAI
5.16 “华为・昇腾杯”AI+遥感影像
a.原始影像
影像格式为tif,包含R、G、B三个波段,训练集影像尺寸为256 * 256像素,初赛测试集影像尺寸为256 * 256像素,复赛、决赛初步确定测试集尺寸可变。
b.标签数据
标签格式为单通道的png,每个像素的标签值由一个三位数表示,使用‘uint16’数据类型存储,该三位数包含了一级和二级两个类别信息,百位上的一个数字表示一级类别,十位和个位上的两个数字一起表示二级类别。
一级类别共分为8类,一级类别及对应的百位上的数字如下表所示:
| 一级类别 | 对应标签百位上的数字 |
|---|---|
| 水体 | 1 |
| 交通运输 | 2 |
| 建筑 | 3 |
| 耕地 | 4 |
| 草地 | 5 |
| 林地 | 6 |
| 裸土 | 7 |
| 其它 | 8 |
二级类别共分为17类,二级类别及对应的十位、个位上的数字如下表所示:
| 二级类别 | 对应标签十位及个位上的数字 |
|---|---|
| 水体 | 01 |
| 道路 | 02 |
| 建筑物 | 03 |
| 机场 | 04 |
| 火车站 | 05 |
| 光伏 | 06 |
| 停车场 | 07 |
| 操场 | 08 |
| 普通耕地 | 09 |
| 农业大棚 | 10 |
| 自然草地 | 11 |
| 绿地绿化 | 12 |
| 自然林 | 13 |
| 人工林 | 14 |
| 自然裸土 | 15 |
| 人为裸土 | 16 |
| 其它 | 17 |
地址:https://www.datafountain.cn/competitions/457/datasets
5.17 遥感影像地块分割(CCF BDCI)

训练集图像文件名称:train.zip
包含140,000张分辨率为2m/pixel,尺寸为256256的JPG图片,文件名称形如T000123.jpg
训练集标注文件名称:annotation.zip
包含和图像文件同等数量,尺寸为256256的PNG格式的单通道伪彩色标注图片,图片的文件名称与train.zip中的图片名称对应, 文件名称形如T000123.png,像素值与类别对应关系如表1所示:
| 像素值 | 类别 |
|---|---|
| 0 | 建筑 |
| 1 | 耕地 |
| 2 | 林地 |
| 3 | 水体 |
| 4 | 道路 |
| 5 | 草地 |
| 6 | 其他 |
| 255 | 未标注区域 |
其中,255代表了未标注区域,表示对应区域的所属类别并不确定,在评测中也不会考虑这部分区域。
测试集A文件名称:testA.zip
包含10,000张分辨率为2m/pixel,尺寸为256256的JPG图片,文件名称形如A000123.jpg
测试集B文件名称:testB.zip
包含20,000张分辨率为2m/pixel,尺寸为256256的JPG图片,文件名称形如B000123.jpg
地址:https://www.datafountain.cn/competitions/475/datasets
链接:https://pan.baidu.com/s/1okfqWl4uFaPi6BN6myNd8Q
提取码:RSAI
5.18 rscup
地址:http://rscup.bjxintong.com.cn/#/theme/3
链接:https://pan.baidu.com/s/1HH9LbZ0WCKJF2r316vpgNA
提取码:RSAI
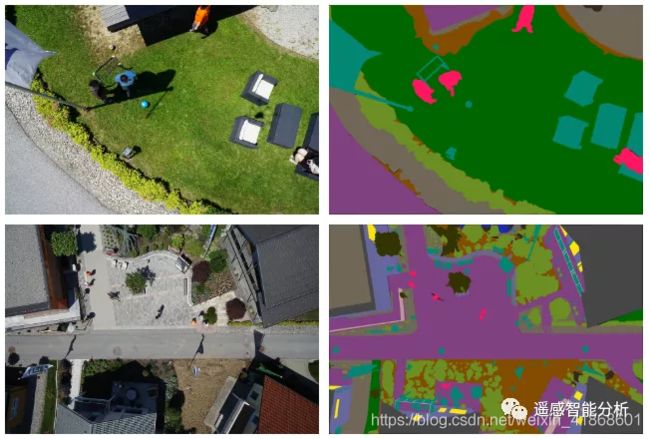
5.19 Segmantic Drone Dataset
地址:https://www.tugraz.at/index.php?id=22387
5.20 2021全国数字生态创新大赛-智能算法赛
数据为覆盖0.8m-2m分辨率的高分系列遥感多光谱影像,成像波段包括R、G、B、Nir波段,数据覆盖地貌包括:山地、丘陵地区、河湖(水库)、平原、城镇等等。感谢浙江大学环境与资源学院为本赛题提供数据支持。
(2)数据规格:4万+张遥感影像及对应地物分类标记样本,影像大小为256*256像素。
初赛:16017张高分遥感影像和标注文件训练集,A榜测试集3000张测试数据,B榜测试集4366张测试数据。
复赛:15904张高分遥感影像和标注文件,6000张测试数据。
(3)训练测试数据说明:
影像保存格式为tif文件,包括R、G、B、Nir四个波段,训练测试集影像尺寸均为256 * 256像素。标签数据格式为单通道的png,每个像素的标签值和地物要素类别对应关系如下:
{
1: "耕地",
2: "林地",
3: "草地",
4: "道路",
5: "城镇建设用地",
6: "农村建设用地",
7: "工业用地",
8: "构筑物"
9: "水域"
10: "裸地"
}
地址:https://tianchi.aliyun.com/competition/entrance/531860/information
5.21 Slovenia 2017 Land Cover Classification Dataset
The full dataset contains 940 EOPatches of the size 5000 x 5000 pixels at 10 m resolution.
地址:http://eo-learn.sentinel-hub.com/
5.22 Dstl Satellite Imagery Feature Detection
国防科学技术实验室(DSTL),是英国国防部的执行机构,也是这次比赛的举办方。他们所提供的训练集里包含了25个1平方公里大小地区的高分辨率卫星图像,具体任务是通过算法进行识别10个不同类型的对象,分别是:
- 房屋和楼房;
- 混杂的人工建筑;
- 道路;
- 铁路;
- 树木;
- 农作物;
- 河流;
- 积水区;
- 大型车辆;
- 小轿车。

地址:https://www.kaggle.com/c/dstl-satellite-imagery-feature-detection
链接:https://pan.baidu.com/s/1COPS-y7x4vSRKBFFArW8ew
提取码:RSAI
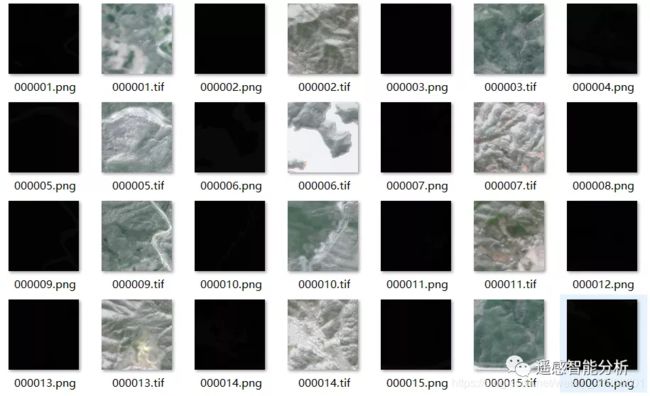
5.23 2019 年县域农业大脑AI挑战赛
比赛数据共包括2部分,分为 train 文件夹和 test文件夹。train 文件夹中包含原始图片 image_n.png 和对应的标注作物类型图片 image_n_label,test 文件夹中只有原始图片。
标注作物类型图片 image_n_label 是基于原始图像的真实标签,代表一张 unint8 单通道图像。每个像素点值表示原始图片 image_n.png 中对应位置所属类别,其中“烤烟”像素值 1,“玉米”像素值 2,“薏仁米”像素值 3,“人造建筑”像素值 4,其余所有位置视为“其他”像素值 0。

地址:https://tianchi.aliyun.com/competition/entrance/231717/information
6.其他
6.1 SAID
地址:https://captain-whu.github.io/iSAID/index.html
6.2 Agriculture-Vision
用于农业模式语义分割的大规模航空农田图像数据集。从美国的3,432个农田中收集了94,986张高质量的航空图像,其中每张图像均由RGB和近红外(NIR)通道组成,分辨率高达每个像素10厘米。该数据集包含六种注释:云影,双株,播种机跳过,死水,水路和杂草丛集。这些类型的田间异常对农田的潜在产量有很大的影响,因此准确定位它们非常重要。在农业视觉数据集中,由于模式之间可能存在重叠,因此这六个模式分别作为二进制掩码存储。用户可以自由决定如何使用这些注释。
每个场图像的文件名格式为(场ID)_(x1)-(y1)-(x2)-(y2)。(jpg / png)。每个字段ID唯一标识要从中裁剪图像的农田,并且(x1,y1,x2,y2)是一个四元组,指示图像被裁剪的位置。有关如何构建数据集的更多详细信息,请参阅我们的论文。
地址:https://www.agriculture-vision.com/dataset
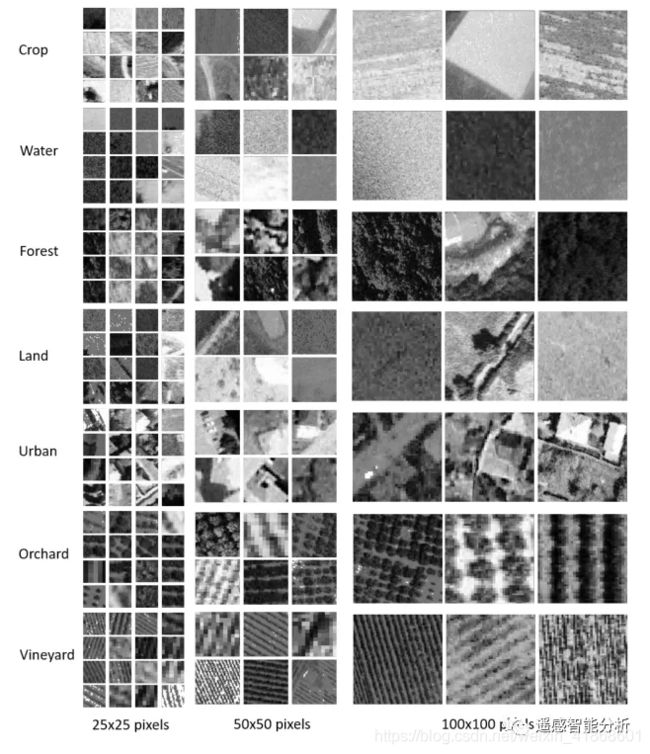
6.3 HistAerialDataset
HistAerial数据集由代表9平方公里区域的灰度图像构建而成(每幅图像每6k像素约6k)。 这些图像是采集的1970年至1990年在法国全国范围内使用光学相机安装在飞机系统上。
提供了对应于粗略地面占用标签的分类:果园,葡萄园,城市,森林,水,作物和土地。
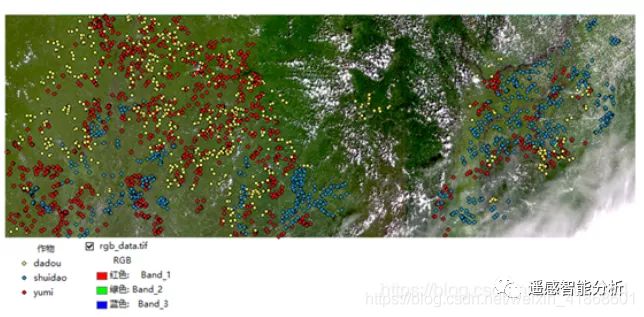
6.4 第二届中国“高分杯”美丽乡村大赛
原始多光谱图像:
1、多光谱图像一张(tif格式),8通道,覆盖面积850公里*300公里
训练数据集:
训练数据集是原始多光谱图像中农作物区块的部分标注数据。
标注样本点数据,给定玉米、大豆和水稻3个类别农作物对应区块的中心点像素位置(x,y)列表,以及对应中心点对应的区块半径3
样例:FID,Id,作物,半径,备注,x,y
0,1,玉米,3, ,12500.7001953,-3286.5600586
1865,1866,大豆,3, ,5941.6601563,-6966.2797852
2086,2087,水稻,3, ,9165.4697266,-14989.2998047
1、(x,y)为tif数据格式的坐标系;(x,y)取值为小数,选手可以四舍五入取整获得对应的像素点位置;选手可以从卫星图片中取出对应图片778作为训练样本;某些农作物区块对应的面积半径可能大于3,选手可以用算法扩展农作物区块面积,作为训练样本;
2、多光谱图像由多张高分图像拼接而成,会有光照等影响因素使得同类农作物区块的颜色可能不同,此处考验的是选手所训练模型的泛化能力。
数据对应关系:RasterXSize对应的是x坐标,RasterYSize对应的是y坐标,x坐标步长是1.0,y坐标步长是-1.0,左上角坐标是(0.0, 1e-07)
地址:https://dianshi.bce.baidu.com/competition/28/rule
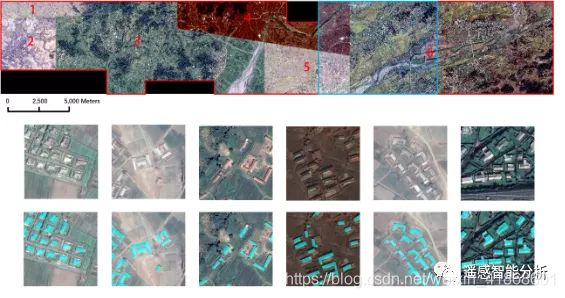
6.5 滑坡
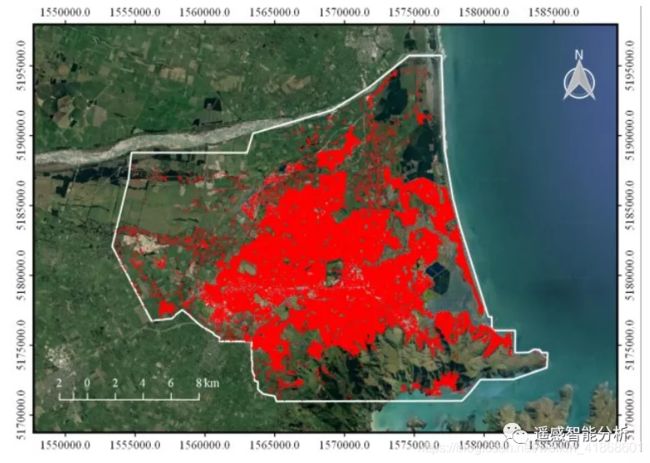
该数据集由卫星光学图像,滑坡边界的形状文件和数字高程模型组成。 该数据集中的所有图像(即770个滑坡图像(红色点)和2003年非滑坡图像)均从2018年5月至2018年8月捕获的TripleSat卫星图像中裁剪而来。
地址:http://study.rsgis.whu.edu.cn/pages/download