常用涡识别方法的Tecplot实现(Q准则、λ2 准则、delta准则、Omega准则)
常用涡识别方法的Tecplot实现(Q准则、λ2 准则、delta准则、Omega准则)
- 0 前言
-
- 0.1 欧拉法涡识别
- 0.2 Tecplot中的涡识别
- 1 涡量法
- 2 Q方法
-
- 2.1 2D的Tecplot公式
- 2.2 3D的Tecplot公式
- 3 λ2方法
- 4 Δ方法
- 5 λci方法
- 6 Ω方法
-
- 6.1 2D的Tecplot公式
- 6.2 3D的Tecplot公式
- 7 不同方法对比
惯例声明:本人没有相关的工程应用经验,只是纯粹对相关算法感兴趣才写此博客。所以如果有错误,欢迎在评论区指正,不胜感激。本文主要关注于算法的实现,对于实际应用等问题本人没有任何经验,所以也不再涉及。
本来想写一个拉格朗日结构LSC的文章,但是不知道是算法理解有问题还是计算参数设置问题,自己搞的结果总是神似形不似,所以放弃,改写一个偏实际应用方面的。
0 前言
0.1 欧拉法涡识别
欧拉法涡识别基于函数与场论的思想,对流场的信息进行计算加工,得到描述涡的函数。之后对涡函数取截面或等值面等方法,展示涡的结构。
大多数欧拉法涡识别都具有平移不变性,即涡识别结果不会因为场的平移而变化。
但是大多数欧拉法涡识别都不具备旋转不变性,即涡识别结果会因为坐标系定义的方向变化而变化(尤其是旋转坐标系下的涡识别)。
常用的涡识别方法有涡量法、Q方法、λ2方法(Lambda-2)、Δ方法(Delta)、λci方法(Lambda-ci)、Ω方法(Omega)。具体的原理不再细说,本文只介绍最终结果。
本文的参考文献以及术语定义来源为:
[1]第三代涡识别方法及其应用综述(王义乾, 桂南)2019
[2]A review of methods for vortex identification in hydroturbines(张宇宁)2018
[3]Tecplot官方Github:https://github.com/Tecplot/handyscripts/tree/master/macro
0.2 Tecplot中的涡识别
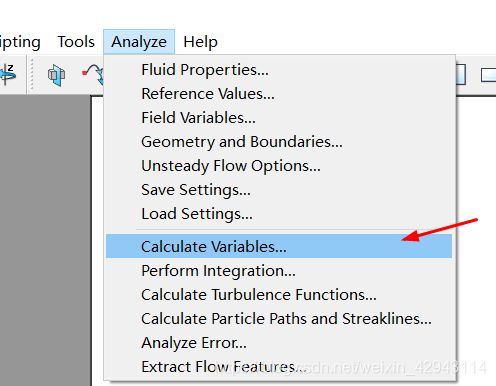
Tecplot在新版本中陆续添加了很多新的涡识别方法,以Q准则为例。
第一步,点击Analyze中的Calculate Variables
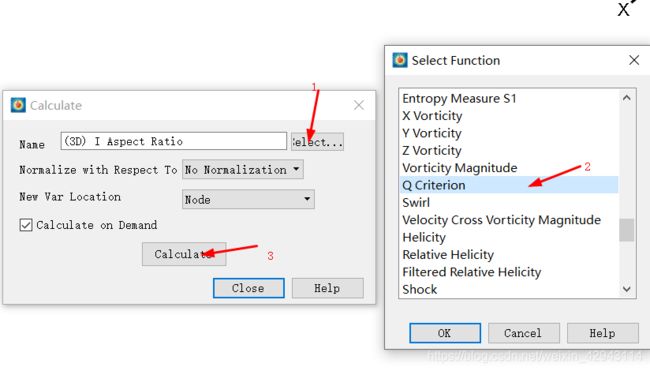
第二步,点击Select,选择Q Criterion,选择Ok。然后点击Calculate计算即可。
如果由于Tecplot的版本太低,或者想要计算的涡识别方法没有被Tecplot收录,就需要自己计算编辑计算了。当然,优先用Tecplot自带的函数计算,那些函数计算经过优化更省时间。
那么可以采取下面的方法:
第一步,点击Data里的Alter,选择Specify Equations

第二步:输入公式,点击Compute计算(这里用到的公式在后面会给出,不用抄)
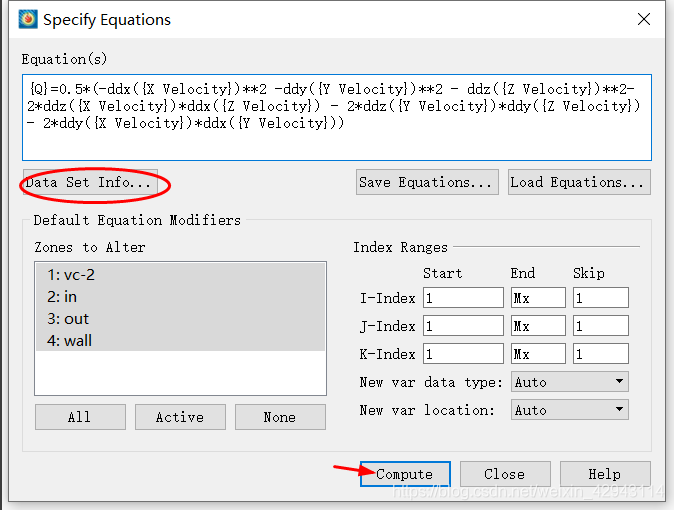
这里注意Tecplot的公式格式:
1 次方用的不是^,而是**
2 变量用花括号{}括起来,具体变量名称参考Data Set Info里面,不同软件不同设置得到的变量名称往往不一样。(也可以用V3来的形式,来表示第3个变量,变量顺序同样参考Data Set Info)
1 涡量法
涡量法是描述涡最简单的方法,但是难以区分旋转导致的涡与剪切导致的涡(比如会把边界层识别出来)。而且难以识别虽然涡量较小但是结构清晰的涡。
Tecplot内Analyze中的Calculate Variables中,自带函数Vorticity Magnitude计算涡量。
由于内置函数计算速度远大于自己编辑的公式,所以不再给出函数。
2 Q方法
这个是最经典的方法,计算量小,而且结果也很不错,推荐使用。
一般选择Q>0的某个等值面作为涡。
Tecplot内Analyze中的Calculate Variables中,自带函数Q Criterion
由于内置函数计算速度远大于自己编辑的公式,所以尽可能用Tecplot内的函数。
公式为
Q = 0.5 ∗ ( ∥ B ∥ F 2 − ∥ A ∥ F 2 ) Q=0.5*(\lVert B \rVert _{F}^{2} - \lVert A \rVert _{F}^{2}) Q=0.5∗(∥B∥F2−∥A∥F2)
其中, ∥ B ∥ F 2 \lVert B \rVert _{F}^{2} ∥B∥F2表示矩阵B的范数的平方,等同于矩阵B所有元素的平方和。
而矩阵A和矩阵B分别为速度梯度的对称张量和反对称张量,即:
A = 0.5 ∗ ( Δ V + Δ V T ) A=0.5*(\Delta V + \Delta V^{T}) A=0.5∗(ΔV+ΔVT)
B = 0.5 ∗ ( Δ V − Δ V T ) B=0.5*(\Delta V - \Delta V^{T}) B=0.5∗(ΔV−ΔVT)
其中T代表矩阵的转置。速度张量的定义如下:
Δ V = ( Ux Uy Uz Vx Vy Vz Wx Wy Wz ) \Delta V=\left( \begin{array}{ccc} \text{Ux} & \text{Uy} & \text{Uz} \\ \text{Vx} & \text{Vy} & \text{Vz} \\ \text{Wx} & \text{Wy} & \text{Wz} \\ \end{array} \right) ΔV=⎝⎛UxVxWxUyVyWyUzVzWz⎠⎞
2.1 2D的Tecplot公式
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Q}=0.5*(-{Ux}**2 -{Vy}**2-2*{Uy}*{Vx})
2.2 3D的Tecplot公式
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Uz}=ddz({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Vz}=ddz({Y Velocity})
{Wx}=ddx({Z Velocity})
{Wy}=ddy({Z Velocity})
{Wz}=ddz({Z Velocity})
{Q}=0.5*(-{Ux}**2 -{Vy}**2 - {Wz}**2- 2*{Uz}*{Wx} - 2*{Vz}*{Wy} - 2*{Uy}*{Vx})
3 λ2方法
该方法是利用当地的压强最低点来判定涡的位置,因为涡核处压强比较小。经过输运方程的无粘不可压假设推导,可以得到λ2方法的计算公式。
相比较Q方法,λ2方法的公式比较复杂。首先需要计算A^2+B^2,然后再计算其特征根,按照大小排序选择第2个特征值,作为涡的判据。这里λ2方法中的λ2就是指的是这个特征值。
这里参考博客:流体中相干涡结构在tecplot中的可视化-Q判据及λ2判据
一般选择λ2<0的某个等值面作为涡。
其中,A^2+B^2的公式可以化简为
A 2 + B 2 = ( U x 2 + U y V x + U z W x 1 2 ( ( U x + V y ) ( U y + V x ) + V z W x + U z W y ) 1 2 ( U y V z + ( U x + W z ) ( U z + W x ) + V x W y ) 1 2 ( ( U x + V y ) ( U y + V x ) + V z W x + U z W y ) V y 2 + U y V x + V z W y 1 2 ( U z V x + U y W x + ( V y + W z ) ( V z + W y ) ) 1 2 ( U y V z + ( U x + W z ) ( U z + W x ) + V x W y ) 1 2 ( U z V x + U y W x + ( V y + W z ) ( V z + W y ) ) W z 2 + U z W x + V z W y ) A^2+B^2=\\ \left( \begin{matrix} Ux^2+UyVx+UzWx& \frac{1}{2}\left( \left( Ux+Vy \right) \left( Uy+Vx \right) +VzWx+UzWy \right)& \frac{1}{2}\left( UyVz+\left( Ux+Wz \right) \left( Uz+Wx \right) +VxWy \right)\\ \frac{1}{2}\left( \left( Ux+Vy \right) \left( Uy+Vx \right) +VzWx+UzWy \right)& Vy^2+UyVx+VzWy& \frac{1}{2}\left( UzVx+UyWx+\left( Vy+Wz \right) \left( Vz+Wy \right) \right)\\ \frac{1}{2}\left( UyVz+\left( Ux+Wz \right) \left( Uz+Wx \right) +VxWy \right)& \frac{1}{2}\left( UzVx+UyWx+\left( Vy+Wz \right) \left( Vz+Wy \right) \right)& Wz^2+UzWx+VzWy\\ \end{matrix} \right) A2+B2=⎝⎛Ux2+UyVx+UzWx21((Ux+Vy)(Uy+Vx)+VzWx+UzWy)21(UyVz+(Ux+Wz)(Uz+Wx)+VxWy)21((Ux+Vy)(Uy+Vx)+VzWx+UzWy)Vy2+UyVx+VzWy21(UzVx+UyWx+(Vy+Wz)(Vz+Wy))21(UyVz+(Ux+Wz)(Uz+Wx)+VxWy)21(UzVx+UyWx+(Vy+Wz)(Vz+Wy))Wz2+UzWx+VzWy⎠⎞
转换为Tecplot语法:
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Uz}=ddz({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Vz}=ddz({Y Velocity})
{Wx}=ddx({Z Velocity})
{Wy}=ddy({Z Velocity})
{Wz}=ddz({Z Velocity})
{T11}={Ux}**2+{Uy}*{Vx}+{Uz}*{Wx}
{T12}=0.5*(({Ux}+{Vy})*({Uy}+{Vx})+{Vz}*{Wx}+{Uz}*{Wy})
{T13}=0.5*(({Uz}+{Wx})*({Ux}+{Wz})+{Uy}*{Vz}+{Vx}*{Wy})
{T22}={Uy}*{Vx}+{Vy}**2+{Vz}*{Wy}
{T23}=0.5*(({Vy}+{Wz})*({Vz}+{Wy})+{Uy}*{Wx}+{Uz}*{Vx})
{T33}={Uz}*{Wx}+{Vz}*{Wy}+{Wz}**2
这里还需要计算特征根,然而Tecplot内没有相应的函数,只能利用Tool工具栏下的Tensor Eigensystem进行计算。
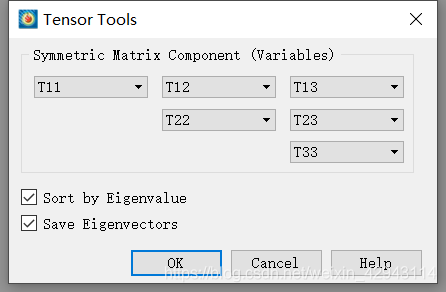
在Tensor Eigensystem里,按照顺序选择刚才计算的矩阵各个元素,点击Ok计算。此时Tecplot会自动生成一大堆和特征值相关的变量。当然别的特征值我们不关心,我们只关心λ2。
之后在绘图界面中,选择EgnVal2变量,进行等值面的绘图。
4 Δ方法
Q判据为涡的地方,Δ方法也会判定为涡。但Q判据不是涡的地方,有可能根据Δ方法也会判定为涡。
一般选取Δ>0的某个值的等值面,作为涡的展示。
这里参考的是Tecplot官网给出的计算
https://kb.tecplot.com/2019/05/02/calculate-delta-criterion/
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Uz}=ddz({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Vz}=ddz({Y Velocity})
{Wx}=ddx({Z Velocity})
{Wy}=ddy({Z Velocity})
{Wz}=ddz({Z Velocity})
{P} = -({Ux}+{Vy}+{Wz})
{Q} = (-{Uy}*{Vx}-{Uz}*{Wx}-{Vz}*{Wy}+{Ux}*{Vy}+{Wz}*{Ux}+{Wz}*{Vy})
{R} = ({Ux}*({Vz}*{Wy}-{Vy}*{Wz})+{Uy}*({Vx}*{Wz}-{Wx}*{Vz})+{Uz}*({Wx}*{Vy}-{Vx}*{Wy}))
{R2} = ({R}+(2/27)*{P}**3-{Q}*{P}/3)
{Q2} = ({Q}-{P}**2/3)'
{Delta} = ({Q2}/3)**3+({R2}/2)**2
5 λci方法
λci方法是在Δ方法的基础上进行计算得到的。
原理是当Δ>0时,速度梯度张量存在2个复数特征根,其特征根的虚部就是λci。
一般选取λci>0的某个值的等值面,作为涡的展示。
具体的计算方法本人能力有限,没有看懂。
这里参考的是Tecplot官网给出的计算(同上面的Δ方法)
https://kb.tecplot.com/2019/05/02/calculate-delta-criterion/
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Uz}=ddz({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Vz}=ddz({Y Velocity})
{Wx}=ddx({Z Velocity})
{Wy}=ddy({Z Velocity})
{Wz}=ddz({Z Velocity})
{P} = -({Ux}+{Vy}+{Wz})
{Q} = (-{Uy}*{Vx}-{Uz}*{Wx}-{Vz}*{Wy}+{Ux}*{Vy}+{Wz}*{Ux}+{Wz}*{Vy})
{R} = ({Ux}*({Vz}*{Wy}-{Vy}*{Wz})+{Uy}*({Vx}*{Wz}-{Wx}*{Vz})+{Uz}*({Wx}*{Vy}-{Vx}*{Wy}))
{R2} = ({R}+(2/27)*{P}**3-{Q}*{P}/3)
{Q2} = ({Q}-{P}**2/3)'
{Delta} = ({Q2}/3)**3+({R2}/2)**2
{Beta2} = IF ({Delta}>=0 ,(ABS(SQRT(ABS({Delta}))-{R2}/2))**(1/3),0)
{Beta3} = IF ({Delta}>=0 ,(ABS(SQRT(ABS({Delta}))+{R2}/2))**(1/3),0)
{LambdaCi}=(SQRT(3)/2)*({Beta2}+{Beta3})
6 Ω方法
Ω方法被认为是最新一代涡识别方法。
其具有归一化阈值的特点,不像前面的各种方法需要调试不同的阈值,Ω方法的阈值被归一化到了0-1之间。
而且Ω方法被认为可以同时展示强涡核弱涡。
一般参考文献里推荐取Ω=0.52作为等值面来展示涡。
Ω方法和Q方法公式类似:
Ω = ∥ B ∥ F 2 ∥ A ∥ F 2 + ∥ B ∥ F 2 + ϵ \Omega=\frac{\lVert B \rVert _{F}^{2}}{\lVert A \rVert _{F}^{2}+\lVert B \rVert _{F}^{2}+\epsilon} Ω=∥A∥F2+∥B∥F2+ϵ∥B∥F2
其中小量 ϵ \epsilon ϵ目的是防止零除以零的现象出现,它理论上只要是大于零的某个量就行。参考文献里给出了推荐值,为:
ϵ = 1 / 1000 ∗ m a x ( ∥ B ∥ F 2 − ∥ A ∥ F 2 ) \epsilon=1/1000*max(\lVert B \rVert _{F}^{2} - \lVert A \rVert _{F}^{2}) ϵ=1/1000∗max(∥B∥F2−∥A∥F2)
结合上面Q准则的公式,可以知道大约等于500分之一的最大的Q准则计算值。
ϵ = m a x ( Q ) / 500 \epsilon=max(Q)/500 ϵ=max(Q)/500
当然要想知道最大的Q准则计算值需要先计算一遍Q准则(感觉有点奇怪)。实际应该没有那么严格,大约是那个量级附近的数就行了。
6.1 2D的Tecplot公式
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{A2}={Ux}**2+0.5*({Uy}+{Vx})**2+{Vy}**2
{B2}=0.5*({Uy}-{Vx})**2
{Omega}={B2}/({A2}+{B2}+1/500*替换成最大Q值)
6.2 3D的Tecplot公式
{Ux}=ddx({X Velocity})
{Uy}=ddy({X Velocity})
{Uz}=ddz({X Velocity})
{Vx}=ddx({Y Velocity})
{Vy}=ddy({Y Velocity})
{Vz}=ddz({Y Velocity})
{Wx}=ddx({Z Velocity})
{Wy}=ddy({Z Velocity})
{Wz}=ddz({Z Velocity})
{A2}={Ux}**2+0.5*({Uy}+{Vx})**2+{Vy}**2+0.5*({Uz}+{Wx})**2+0.5*({Vz}+{Wy})**2+{Wz}**2
{B2}=0.5*(({Uy}-{Vx})**2+({Uz}-{Wx})**2+({Vz}-{Wy})**2)
{Omega}={B2}/({A2}+{B2}+1/500*替换成最大Q值)
7 不同方法对比
这里我用Fluent简单计算了一个射流流场,网格量比较少,比较丑。但是大概比较不同涡识别方法,大概够用了,也具有足够多的涡结构。

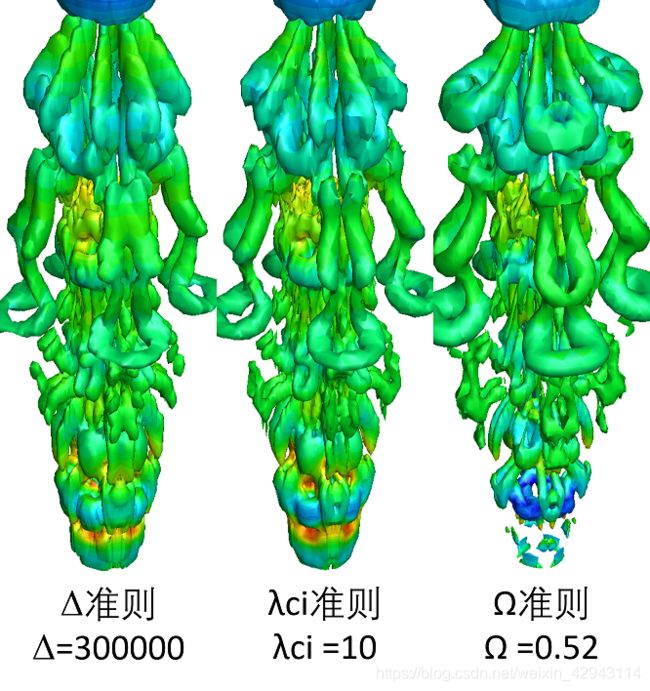
可以看到其实各种涡识别方法其实大同小异,调一下参数大多长得也比较像。
个人感觉,平时默认用Q准则就足够了,其余算法计算量大,但是和Q比起来没有特别明显的优势。
不过Ω准则识别出的马蹄涡基本没有断的,而且阈值无脑选文献中推荐的0.52也不需要做过多修改,比较方便。可以说是这里面效果最好的。