ESP32学习笔记(18)——光强度GY-30(BH1750)使用
一、简介

BH1750FVI 是一种用于两线式串行总线接口的数字型光强度传感器集成电路。这种集成电路可以根据收集的光线强度数据来调整液晶或者键盘背景灯的亮度。利用它的高分辨率可以探测较大范围的光强度变化。
传感器特点:
- 支持I2CBUS接口
- 接近视觉灵敏度的光谱灵敏度特性
- 输出对应亮度的数字值
- 对应广泛的输入光范围。(相当于1-65535lx)
- 通过降低功率功能,实现低电流化。
- 通过50Hz/60Hz除光噪音功能实现稳定的测定。
- 支持1.8v逻辑输入接口。
- 无需其他外部件。
- 光源依赖性弱。
- 有两种可选的I2Cslave地址。
- 可调的测量结果影响较大的因素为光入口大小。
- 使用这种功能计算1.1lx到100000lx马克斯/分钟的范围。
- 最小误差变动在±20%。
- 受红外线影响很小。
1.1 测量程序步骤

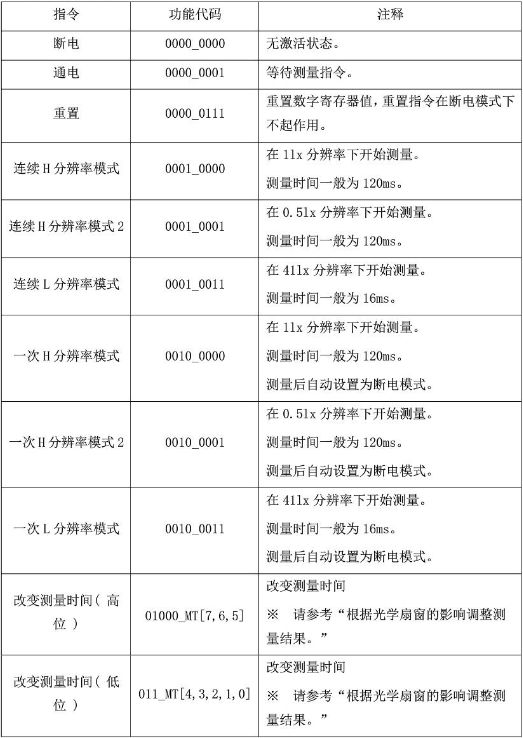
1.2 指令集合
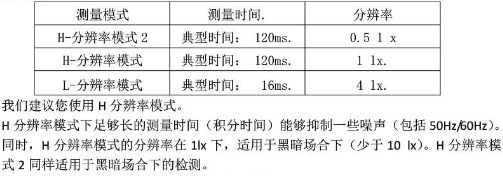
1.3 测量模式说明
二、硬件连接
| 功能口 | 引脚 |
|---|---|
| SCL | GPIO23 |
| SDA | GPIO18 |
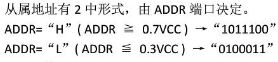
| ADDR | ADDR ≥ 0.7VCC 从机地址为”1011100“ ADDR ≤ 0.3VCC 从机地址为”0100011“ |
三、添加I2C驱动
查看 ESP32学习笔记(17)——I2C接口使用
四、I2C通信流程

测量结果为2字节(高字节 High Byte 和低字节 Low Byte)数据,计算公式为:
光照强度(单位lx)=(High Byte + Low Byte)/ 1.2
五、ESP32作为主机与BH1750光照强度传感器通信
连续高分辨率模式
I2C_Init()初始化I2C后
↓
BH1750_Init()配置BH1750连续高分辨率模式
↓
BH1750_ReadLightIntensity()获取光强度
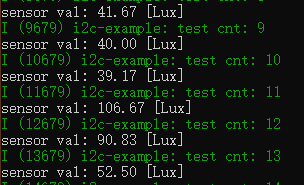
#include 查看打印:
• 由 Leung 写于 2021 年 5 月 14 日
• 参考:BH1750FVI光强度传感器及其STM32驱动程序
BH1750 STM32 驱动程序