理论与实践ROS笔记_第二节课_ROS基础
catkin_make 相当于linux的cmake;
目录
- 1.工作空间覆盖
- 2.ROS通信编程
-
- 2.1 话题
- 2.2 服务
- 2.3 动作
- 3.分布式通信
- 4. Launch
- 5. TF
1.工作空间覆盖

 所以在执行覆盖时需要小心,避免出现覆盖的功能包取代系统原依赖功能包的情况
所以在执行覆盖时需要小心,避免出现覆盖的功能包取代系统原依赖功能包的情况
2.ROS通信编程
2.1 话题


#include 
[实现一个订阅者]ppt错了

#include "ros/ros.h"
#include "std_msgs/String.h"
// 接受到订阅的消息后,会进入消息回调函数
// std_msgs::String::ConstPtr即为订阅函数收到的发布者的话题的指针
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//将接收到的信息打印出来
ROS_INFO("I heard: [%s]", msg->data.c_str());// ROS_INFO:消息打印
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc,argv,"listener");
//创建节点句柄
ros::NodeHandle n;
//创建一个Subscriber, 订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
// 订阅的话题名:chatter.订阅者的队列长度为1000.收到订阅消息后进入制定订阅函数chatterCallback
//循环等待回调函数
ros::spin(); //类比spinOnce的查询一次,spin可以循环等待,所以spin不需要建立while()函数来构建循环
return 0;
}

2.2 服务

srv - - -上方的内容是请求内容,下方为应答内容
 注意:在创建客户端或者服务器的时候,必须要有srv文件.另外服务器和客户端的回调函数必须是布尔类型的函数.
注意:在创建客户端或者服务器的时候,必须要有srv文件.另外服务器和客户端的回调函数必须是布尔类型的函数.
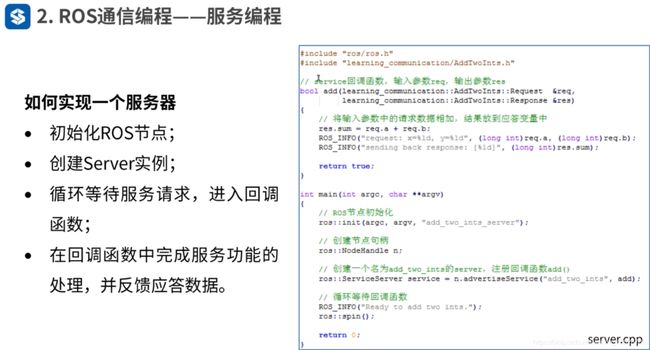
#include "ros/ros.h"
#include "test_package/Addtwo.h"
//service回调函数,输入参数req,输出参数res
//将srv文件中Addtwo文件中的request部分 引用为req
//将srv文件中Addtwo文件中的response部分 引用为res
bool add(test_package::Addtwo::Request& req,
test_package::Addtwo::Response& res)
{
//将输入参数中的请求数据增加,结果放到应答变量中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld ", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response:[%ld]", (long int)res.sum);
return true;
}
int main(int argc, char *argv[])
{
//ROS节点初始化
ros::init(argc, argv, "add_two_server");
//创建节点句柄
ros::NodeHandle n;
//创建一个名为add_two_ints的server,注册回调函数add()
ros::ServiceServer service = n.advertiseService("add_two_ints",add);
//循环等待回调函数
ROS_INFO("ready to add two ints.");
ros::spin();
return 0;
}


#include ![]()
2.3 动作

例如机器人运动过程中不断的发布自己的状态,或是在运动过程中可以随时停止掉它前进转弯的状态.
维持一段时间且存在反馈机制

定义动作目标
- - -
定义结果
- - -
定义一定周期的反馈内容
 遇到
遇到
/opt/ros/kinetic/include/actionlib/server/action_server_base.h:171:对‘actionlib::GoalIDGenerator::GoalIDGene
rator()’未定义的引用
CMakeFiles/DoDIsh_Server.dir/src/DoDIsh_Server.cpp.o:在函数‘actionlib::StatusTracker<my_package::DoDishesAct
ion_<std::allocator<void> > >::StatusTracker(boost::shared_ptr<my_package::DoDishesActionGoal_<std::allocator
<void> > const> const&)’中:
/opt/ros/kinetic/include/actionlib/server/status_tracker_imp.h:52:对‘actionlib::GoalIDGenerator::GoalIDGener
ator()’未定义的引用
/opt/ros/kinetic/include/actionlib/server/status_tracker_imp.h:62:对‘actionlib::GoalIDGenerator::generateID(
)’未定义的引用
类似的错误,需要在CMakleLists中的find_package添加actionlib.
#include
#include
#include "my_package/DoDishesAction.h"
typedef actionlib::SimpleActionServer Server; //整个action的server部分
//收到action的goal后调用该函数
void execute(const my_package::DoDishesGoalConstPtr& goal,Server* as) { //my_package::DoDishesGoalConstPtr& : action的goal部分指针
ros::Rate r(1); // ros::Rate类可以制定循环的频率,本例中为1Hz
my_package::DoDishesFeedback feedback; //action的反馈部分
ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id); //日志的提示
//假设洗盘子的进度,并且按照1hz的频率发布进度feedback
for (int i = 1; i <= 10; i++) {
feedback.percent_complete = i * 10;
as->publishFeedback(feedback); //发布反馈信息
r.sleep();
}
// 当action完成后,向客户端返回结果
ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id);
as->setSucceeded(); //向客户端发送成功信息
}
int main(int argc, char** argv)
{
ros::init(argc,argv,"do_dish_server");
ros::NodeHandle n;
//定义一个服务器,服务器的名字为“do_dishes"
Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); //boost::bind() : 用于将参数绑定到函数中
//boost::bind(&execute, _1, &server)是当收到新的goal时候需要的返回函数
// 服务器开始运行
server.start();
ros::spin();
return 0;
}


#include
#include "my_package/DoDishesAction.h"
typedef actionlib::SimpleActionClient Client; //整个action的client部分
//当action完成后会调用该回调函数一次(传入参数:action的goalstate,action的result指针)
void done(const actionlib::SimpleClientGoalState& state,
const my_package::DoDishesResultConstPtr& result)
{
ROS_INFO("yay! The dishes are now clean");
ros::shutdown();
}
//当action激活后会调用该回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
//收到feedback后调用该回调函数(传入参数:action的feedback指针)
void feedbackCb(const my_package::DoDishesFeedbackConstPtr& feedback)
{
ROS_INFO("percent_compete : %f ", feedback->percent_complete);
}
int main(int argc, char** argv)
{
ros::init(argc,argv,"do_dishes_client");
//定义一个客户端
Client client("do_dishes", true); // 与server的服务器名字相同
//等待一个服务器
ROS_INFO("waiting for action server to start:");
client.waitForServer(); //等待服务端的启动
ROS_INFO("Action server started, sending goal.");
//创建一个action的goal
my_package::DoDishesGoal goal;
goal.dishwasher_id=1;
//发送action的goal给服务器端,并且设置回调函数 (目标,&完成后函数,&启动时函数,&过程中的函数)
client.sendGoal(goal, &done, &activeCb, &feedbackCb);
ros::spin();
return 0;
}

3.分布式通信

ifconfig查看ip地址
![]()

sudo gedit /etc/hosts 填写服务器

ping + 主机名
查看链接情况

4. Launch
 name可以覆盖掉节点运行时的名字。运行时以launch命名的名字为准
name可以覆盖掉节点运行时的名字。运行时以launch命名的名字为准
output:决定内部ROS信息是否要打印;
respawn:当前节点失效时会重新启动;
requied:指定节点是否为必要节点(不开启则launcn失败)
ns:namespace,节点命名空间的属性
args:节点的具体输入参数
 < param > / < rosparam >:全局变量;
< param > / < rosparam >:全局变量;
< arg >: launch的局部变量
 更多launch资料:
更多launch资料:
https://blog.csdn.net/weixin_41995979/article/details/81784987
https://blog.csdn.net/qq_33444963/article/details/77893881
5. TF




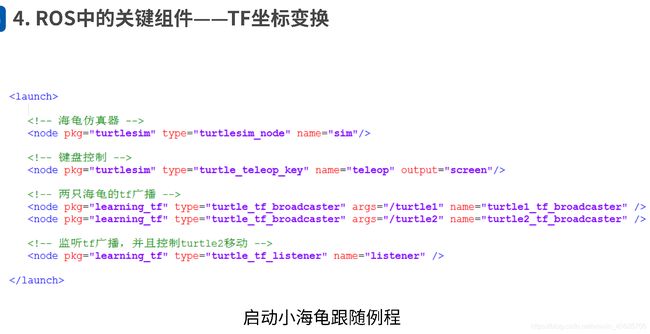 启动功能包名为“turtlesim”,执行文件名称为“turtlesim_node”的c++文件。为节点指派名称为“sim”;
启动功能包名为“turtlesim”,执行文件名称为“turtlesim_node”的c++文件。为节点指派名称为“sim”;
启动功能包名为“turtlesim”,执行文件名称为“turtle_teleop_key”的c++文件。为节点指派名称为“teleop”,并在当前控制台输出终端结果;
启动功能包名为“learning_tf”,执行文件名称为“turtle_tf_broadcaster”的c++文件。为节点指派名称为“turtle1_tf_broadcaster”,args属性为“/turtle1”;
启动功能包名为“learning_tf”,执行文件名称为“turtle_tf_broadcaster”的c++文件。为节点指派名称为“turtle2_tf_broadcaster”,args属性为“/turtle2”;
启动功能包名为“learning_tf”,执行文件名称为“turtle_tf_listener”的c++文件。为节点指派名称为“listener”。