STM32读取TCS34725源代码,RGB转HSL代码,已通过实际测试
STM32F103C8T6读取颜色识别模块,并把读取到的原始数据转换为HSL格式。
/**********************************************************************************/
20201023更新
TCS34725只接GND、VCC、SCL、SDA四个引脚,
STM32F103C8T6的引脚接PB10-SCL,PB11-SDA。PA3是LED指示灯,
1、修改SCL和SDA引脚在文件 tcs34725.c 中,
2、修改读取颜色频率,直接在main函数的主循环中修改时间,
Keil 工程下载地址:
链接:https://pan.baidu.com/s/17iteeJGcdvoZZOGRDoe9nw (永久有效)
提取码:wfcu
/**********************************************************************************/



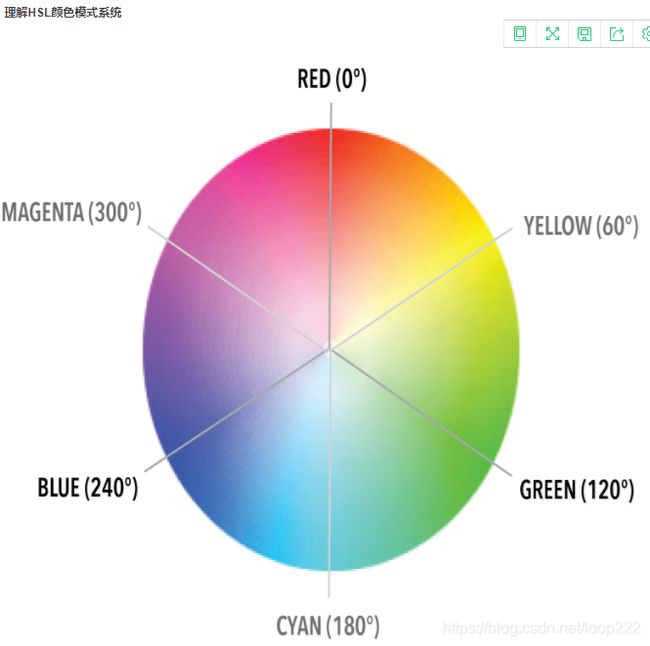
读取TCS34725的源代码很多,也很简单,但只是读取原始数据,也不知道怎么转换,官方手册也没说清楚,一般RGB的数据它偏偏是RGBC,到现在我也没搞清楚这个“C”代表啥意思。网上能搜到的RGB转HSL都是以RGB888的格式为准,转换之前除以255归一化,得到0-1之间的小数,然后转换,年前这个程序我调试了很久,今天突然搞明白了,把TCS的原始数据RGB除以C得到0-1之间的小数,这个C就相当于上面的255。上代码:
/******************************************************************************/
#define TCS34725_ADDRESS (0x29)
#define TCS34725_COMMAND_BIT (0x80)
#define TCS34725_ENABLE (0x00)
#define TCS34725_ENABLE_AIEN (0x10) /* RGBC Interrupt Enable */
#define TCS34725_ENABLE_WEN (0x08) /* Wait enable - Writing 1 activates the wait timer */
#define TCS34725_ENABLE_AEN (0x02) /* RGBC Enable - Writing 1 actives the ADC, 0 disables it */
#define TCS34725_ENABLE_PON (0x01) /* Power on - Writing 1 activates the internal oscillator, 0 disables it */
#define TCS34725_ATIME (0x01) /* Integration time */
#define TCS34725_WTIME (0x03) /* Wait time (if TCS34725_ENABLE_WEN is asserted) */
#define TCS34725_WTIME_2_4MS (0xFF) /* WLONG0 = 2.4ms WLONG1 = 0.029s */
#define TCS34725_WTIME_204MS (0xAB) /* WLONG0 = 204ms WLONG1 = 2.45s */
#define TCS34725_WTIME_614MS (0x00) /* WLONG0 = 614ms WLONG1 = 7.4s */
#define TCS34725_AILTL (0x04) /* Clear channel lower interrupt threshold */
#define TCS34725_AILTH (0x05)
#define TCS34725_AIHTL (0x06) /* Clear channel upper interrupt threshold */
#define TCS34725_AIHTH (0x07)
#define TCS34725_PERS (0x0C) /* Persistence register - basic SW filtering mechanism for interrupts */
#define TCS34725_PERS_NONE (0b0000) /* Every RGBC cycle generates an interrupt */
#define TCS34725_PERS_1_CYCLE (0b0001) /* 1 clean channel value outside threshold range generates an interrupt */
#define TCS34725_PERS_2_CYCLE (0b0010) /* 2 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_3_CYCLE (0b0011) /* 3 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_5_CYCLE (0b0100) /* 5 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_10_CYCLE (0b0101) /* 10 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_15_CYCLE (0b0110) /* 15 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_20_CYCLE (0b0111) /* 20 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_25_CYCLE (0b1000) /* 25 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_30_CYCLE (0b1001) /* 30 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_35_CYCLE (0b1010) /* 35 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_40_CYCLE (0b1011) /* 40 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_45_CYCLE (0b1100) /* 45 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_50_CYCLE (0b1101) /* 50 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_55_CYCLE (0b1110) /* 55 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_60_CYCLE (0b1111) /* 60 clean channel values outside threshold range generates an interrupt */
#define TCS34725_CONFIG (0x0D)
#define TCS34725_CONFIG_WLONG (0x02) /* Choose between short and long (12x) wait times via TCS34725_WTIME */
#define TCS34725_CONTROL (0x0F) /* Set the gain level for the sensor */
#define TCS34725_ID (0x12) /* 0x44 = TCS34721/TCS34725, 0x4D = TCS34723/TCS34727 */
#define TCS34725_STATUS (0x13)
#define TCS34725_STATUS_AINT (0x10) /* RGBC Clean channel interrupt */
#define TCS34725_STATUS_AVALID (0x01) /* Indicates that the RGBC channels have completed an integration cycle */
#define TCS34725_CDATAL (0x14) /* Clear channel data */
#define TCS34725_CDATAH (0x15)
#define TCS34725_RDATAL (0x16) /* Red channel data */
#define TCS34725_RDATAH (0x17)
#define TCS34725_GDATAL (0x18) /* Green channel data */
#define TCS34725_GDATAH (0x19)
#define TCS34725_BDATAL (0x1A) /* Blue channel data */
#define TCS34725_BDATAH (0x1B)
#define TCS34725_INTEGRATIONTIME_2_4MS 0xFF /**< 2.4ms - 1 cycle - Max Count: 1024 */
#define TCS34725_INTEGRATIONTIME_24MS 0xF6 /**< 24ms - 10 cycles - Max Count: 10240 */
#define TCS34725_INTEGRATIONTIME_50MS 0xEB /**< 50ms - 20 cycles - Max Count: 20480 */
#define TCS34725_INTEGRATIONTIME_101MS 0xD5 /**< 101ms - 42 cycles - Max Count: 43008 */
#define TCS34725_INTEGRATIONTIME_154MS 0xC0 /**< 154ms - 64 cycles - Max Count: 65535 */
#define TCS34725_INTEGRATIONTIME_240MS 0x9C /**< 240ms - 100 cycles - Max Count: 65535 */
#define TCS34725_INTEGRATIONTIME_700MS 0x00 /**< 700ms - 256 cycles - Max Count: 65535 */
#define TCS34725_GAIN_1X 0x00 /**< No gain */
#define TCS34725_GAIN_4X 0x01 /**< 4x gain */
#define TCS34725_GAIN_16X 0x02 /**< 16x gain */
#define TCS34725_GAIN_60X 0x03 /**< 60x gain */
/******************************************************************************/
#define TCS_SDA_IN() {GPIOB->CRH&=0xFFFF0FFF;GPIOB->CRH|=8<<12;}
#define TCS_SDA_OUT() {GPIOB->CRH&=0xFFFF0FFF;GPIOB->CRH|=3<<12;}
#define TCS_SDA_READ GPIOB->IDR&(1<<11)
#define TCS_SCL_H GPIO_SetBits(GPIOB,GPIO_Pin_10)
#define TCS_SCL_L GPIO_ResetBits(GPIOB,GPIO_Pin_10)
#define TCS_SDA_H GPIO_SetBits(GPIOB,GPIO_Pin_11)
#define TCS_SDA_L GPIO_ResetBits(GPIOB,GPIO_Pin_11)
/******************************************************************************/
#define max3v(v1, v2, v3) ((v1)<(v2)? ((v2)<(v3)?(v3):(v2)):((v1)<(v3)?(v3):(v1)))
#define min3v(v1, v2, v3) ((v1)>(v2)? ((v2)>(v3)?(v3):(v2)):((v1)>(v3)?(v3):(v1)))
typedef struct{
unsigned short c; //[0-65536]
unsigned short r;
unsigned short g;
unsigned short b;
}COLOR_RGBC;//RGBC
typedef struct{
unsigned short h; //[0,360]
unsigned char s; //[0,100]
unsigned char l; //[0,100]
}COLOR_HSL;//HSL
COLOR_RGBC rgb;
COLOR_HSL hsl;
/******************************************************************************/
void delay_s(u32 i)
{
while(i--);
}
/******************************************************************************/
void TCS34725_I2C_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;//PB10/PB10=外接I2C
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//通用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度
GPIO_Init(GPIOB, &GPIO_InitStructure);//对选中管脚初始化
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //高电平
}
/*********************************************/
void TCS34725_I2C_Start()
{
TCS_SDA_OUT();
TCS_SDA_H;
TCS_SCL_H;
delay_s(40);//delay_us(4);
TCS_SDA_L;
delay_s(40);//delay_us(4);
TCS_SCL_L;
}
/*********************************************/
void TCS34725_I2C_Stop()
{
TCS_SDA_OUT();
TCS_SCL_L;
TCS_SDA_L;
delay_s(40);//delay_us(4);
TCS_SCL_H;
TCS_SDA_H;
delay_s(40);//delay_us(4);
}
/*********************************************/
//返回值:1,接收应答失败
// 0,接收应答成功
u8 TCS34725_I2C_Wait_ACK()
{
u32 t=0;
TCS_SDA_IN();//SDA设置为输入
TCS_SDA_H;
delay_s(10);//delay_us(1);
TCS_SCL_H;
delay_s(10);//delay_us(1);
while(TCS_SDA_READ)
{
t++;
if(t > 250)
{
TCS34725_I2C_Stop();
return 1;
}
}
TCS_SCL_L;
return 0;
}
/*********************************************/
//产生ACK应答
void TCS34725_I2C_ACK()
{
TCS_SCL_L;
TCS_SDA_OUT();//sda线输出
TCS_SDA_L;
delay_s(20);//delay_us(2);
TCS_SCL_H;
delay_s(20);//delay_us(2);
TCS_SCL_L;
}
/*********************************************/
//不产生ACK应答
void TCS34725_I2C_NACK()
{
TCS_SCL_L;
TCS_SDA_OUT();//sda线输出
TCS_SDA_H;
delay_s(20);//delay_us(2);
TCS_SCL_H;
delay_s(20);//delay_us(2);
TCS_SCL_L;
}
/*********************************************/
//I2C发送一个字节
void TCS34725_I2C_Send_Byte(u8 byte)
{
u8 i;
TCS_SDA_OUT();//sda线输出
TCS_SCL_L;//拉低时钟开始数据传输
for(i = 0; i < 8; i++)
{
if(((byte&0x80)>>7)==1)TCS_SDA_H;
else
TCS_SDA_L;
byte <<= 1;
delay_s(20);//delay_us(2);
TCS_SCL_H;
delay_s(20);//delay_us(2);
TCS_SCL_L;
delay_s(20);//delay_us(2);
}
}
/*********************************************/
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 TCS34725_I2C_Read_Byte(u8 ack)
{
u8 i,receive = 0;
TCS_SDA_IN();
for(i = 0; i < 8; i++)
{
TCS_SCL_L;
delay_s(20);//delay_us(2);
TCS_SCL_H;
receive <<= 1;
if(TCS_SDA_READ) receive++;
delay_s(10);//delay_us(1);
}
if (!ack) TCS34725_I2C_NACK();//发送nACK
else TCS34725_I2C_ACK(); //发送ACK
return receive;
}
/*********************************************/
/*******************************************************************************
* @brief Writes data to a slave device.
*
* @param slaveAddress - Adress of the slave device.
* @param dataBuffer - Pointer to a buffer storing the transmission data.
* @param bytesNumber - Number of bytes to write.
* @param stopBit - Stop condition control.
* Example: 0 - A stop condition will not be sent;
* 1 - A stop condition will be sent.
*******************************************************************************/
void TCS34725_I2C_Write(u8 slaveAddress, u8* dataBuffer,u8 bytesNumber, u8 stopBit)
{
u8 i = 0;
TCS34725_I2C_Start();
TCS34725_I2C_Send_Byte((slaveAddress << 1) | 0x00); //发送从机地址写命令
TCS34725_I2C_Wait_ACK();
for(i = 0; i < bytesNumber; i++)
{
TCS34725_I2C_Send_Byte(*(dataBuffer + i));
TCS34725_I2C_Wait_ACK();
}
if(stopBit == 1) TCS34725_I2C_Stop();
}
/*******************************************************************************
* @brief Reads data from a slave device.
*
* @param slaveAddress - Adress of the slave device.
* @param dataBuffer - Pointer to a buffer that will store the received data.
* @param bytesNumber - Number of bytes to read.
* @param stopBit - Stop condition control.
* Example: 0 - A stop condition will not be sent;
* 1 - A stop condition will be sent.
*******************************************************************************/
void TCS34725_I2C_Read(u8 slaveAddress, u8* dataBuffer, u8 bytesNumber, u8 stopBit)
{
u8 i = 0;
TCS34725_I2C_Start();
TCS34725_I2C_Send_Byte((slaveAddress << 1) | 0x01); //发送从机地址读命令
TCS34725_I2C_Wait_ACK();
for(i = 0; i < bytesNumber; i++)
{
if(i == bytesNumber - 1)
{
*(dataBuffer + i) = TCS34725_I2C_Read_Byte(0);//读取的最后一个字节发送NACK
}
else
{
*(dataBuffer + i) = TCS34725_I2C_Read_Byte(1);
}
}
if(stopBit == 1) TCS34725_I2C_Stop();
}
/*******************************************************************************
* @brief Writes data into TCS34725 registers, starting from the selected
* register address pointer.
*
* @param subAddr - The selected register address pointer.
* @param dataBuffer - Pointer to a buffer storing the transmission data.
* @param bytesNumber - Number of bytes that will be sent.
*
* @return None.
*******************************************************************************/
void TCS34725_Write(u8 subAddr, u8* dataBuffer, u8 bytesNumber)
{
u8 sendBuffer[10] = {0, };
u8 byte = 0;
sendBuffer[0] = subAddr | TCS34725_COMMAND_BIT;
for(byte = 1; byte <= bytesNumber; byte++)
{
sendBuffer[byte] = dataBuffer[byte - 1];
}
TCS34725_I2C_Write(TCS34725_ADDRESS, sendBuffer, bytesNumber + 1, 1);
}
/*******************************************************************************
* @brief Reads data from TCS34725 registers, starting from the selected
* register address pointer.
*
* @param subAddr - The selected register address pointer.
* @param dataBuffer - Pointer to a buffer that will store the received data.
* @param bytesNumber - Number of bytes that will be read.
*
* @return None.
*******************************************************************************/
void TCS34725_Read(u8 subAddr, u8* dataBuffer, u8 bytesNumber)
{
subAddr |= TCS34725_COMMAND_BIT;
TCS34725_I2C_Write(TCS34725_ADDRESS, (u8*)&subAddr, 1, 0);
TCS34725_I2C_Read(TCS34725_ADDRESS, dataBuffer, bytesNumber, 1);
}
/*******************************************************************************
* @brief TCS34725设置积分时间
*
* @return None
*******************************************************************************/
void TCS34725_SetIntegrationTime(u8 time)
{
TCS34725_Write(TCS34725_ATIME, &time, 1);
}
/*******************************************************************************
* @brief TCS34725设置增益
*
* @return None
*******************************************************************************/
void TCS34725_SetGain(u8 gain)
{
TCS34725_Write(TCS34725_CONTROL, &gain, 1);
}
/*******************************************************************************
* @brief TCS34725使能
*
* @return None
*******************************************************************************/
void TCS34725_Enable(void)
{
u8 cmd = TCS34725_ENABLE_PON;
TCS34725_Write(TCS34725_ENABLE, &cmd, 1);
cmd = TCS34725_ENABLE_PON | TCS34725_ENABLE_AEN;
TCS34725_Write(TCS34725_ENABLE, &cmd, 1);
//delay_s(600000);//delay_ms(3);//延时应该放在设置AEN之后
}
/*******************************************************************************
* @brief TCS34725失能
*
* @return None
*******************************************************************************/
void TCS34725_Disable(void)
{
u8 cmd = 0;
TCS34725_Read(TCS34725_ENABLE, &cmd, 1);
cmd = cmd & ~(TCS34725_ENABLE_PON | TCS34725_ENABLE_AEN);
TCS34725_Write(TCS34725_ENABLE, &cmd, 1);
}
/*******************************************************************************
* @brief TCS34725初始化
*
* @return ID - ID寄存器中的值
*******************************************************************************/
u8 TCS34725_Init(void)
{
u8 id=0;
TCS34725_I2C_Init();
TCS34725_Read(TCS34725_ID, &id, 1); //TCS34725 的 ID 是 0x44 可以根据这个来判断是否成功连接
if(id==0x44)
{
TCS34725_SetIntegrationTime(TCS34725_INTEGRATIONTIME_240MS);
TCS34725_SetGain(TCS34725_GAIN_1X);
TCS34725_Enable();
return 1;
}
return 0;
}
/*******************************************************************************
* @brief TCS34725获取单个通道数据
*
* @return data - 该通道的转换值
*******************************************************************************/
u16 TCS34725_GetChannelData(u8 reg)
{
u8 tmp[2] = {0,0};
u16 data;
TCS34725_Read(reg, tmp, 2);
data = (tmp[1] << 8) | tmp[0];
return data;
}
/*******************************************************************************
* @brief TCS34725获取各个通道数据
*
* @return 1 - 转换完成,数据可用
* 0 - 转换未完成,数据不可用
*******************************************************************************/
u8 TCS34725_GetRawData(COLOR_RGBC *rgbc)
{
u8 status = TCS34725_STATUS_AVALID;
TCS34725_Read(TCS34725_STATUS, &status, 1);
if(status & TCS34725_STATUS_AVALID)
{
rgbc->c = TCS34725_GetChannelData(TCS34725_CDATAL);
rgbc->r = TCS34725_GetChannelData(TCS34725_RDATAL);
rgbc->g = TCS34725_GetChannelData(TCS34725_GDATAL);
rgbc->b = TCS34725_GetChannelData(TCS34725_BDATAL);
return 1;
}
return 0;
}
/******************************************************************************/
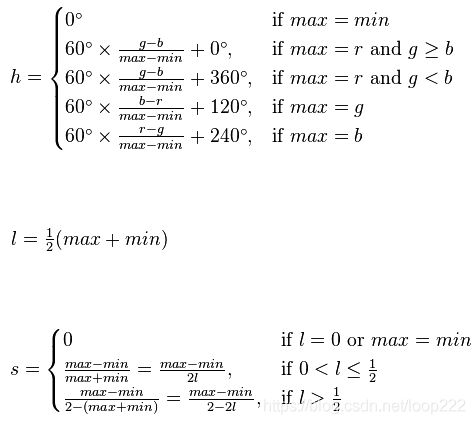
//RGB转HSL
void RGBtoHSL(COLOR_RGBC *Rgb, COLOR_HSL *Hsl)
{
u8 maxVal,minVal,difVal;
u8 r = Rgb->r*100/Rgb->c; //[0-100]
u8 g = Rgb->g*100/Rgb->c;
u8 b = Rgb->b*100/Rgb->c;
maxVal = max3v(r,g,b);
minVal = min3v(r,g,b);
difVal = maxVal-minVal;
//计算亮度
Hsl->l = (maxVal+minVal)/2;
if(maxVal == minVal)//若r=g=b,灰度
{
Hsl->h = 0;
Hsl->s = 0;
}
else
{
//计算色调
if(maxVal==r)
{
if(g>=b)
Hsl->h = 60*(g-b)/difVal;
else
Hsl->h = 60*(g-b)/difVal+360;
}
else
{
if(maxVal==g)Hsl->h = 60*(b-r)/difVal+120;
else
if(maxVal==b)Hsl->h = 60*(r-g)/difVal+240;
}
//计算饱和度
if(Hsl->l<=50)Hsl->s=difVal*100/(maxVal+minVal); //[0-100]
else
Hsl->s=difVal*100/(200-(maxVal+minVal));
}
}
/******************************************************************************/
使用时只需调用三个子程序:
1、TCS34725_Init();
2、TCS34725_GetRawData(&rgb);
3、RGBtoHSL(&rgb,&hsl);
把数据打印出来
printf("R=%d G=%d B=%d C=%d\r\n",rgb.r,rgb.g,rgb.b,rgb.c);
printf("H=%d S=%d L=%d\r\n",hsl.h,hsl.s,hsl.l);
初始化中读取颜色的间隔是50ms,所以读取速度不要太频繁