OpenCvSharp_FindContours函数参数详解
OpenCvSharp中通过使用findContours函数,简单几个的步骤就可以检测出物体的轮廓,很方便。这些准备继续探讨一下findContours方法中各参数的含义及用法,比如要求只检测最外层轮廓该怎么办?contours里边的数据结构是怎样的?hierarchy到底是什么鬼?
先从opencv中的findContours函数原型看起:
findContours( InputOutputArray image, OutputArrayOfArrays contours,
OutputArray hierarchy, int mode,
int method, Point offset=Point()); 第一个参数:image,单通道图像矩阵,可以是灰度图,但更常用的是二值图像,一般是经过Canny、拉普拉斯等边缘检测算子处理过的二值图像
第二个参数:contours,定义为“vector
有多少轮廓,向量contours就有多少元素。
第三个参数:hierarchy,定义为“vector
Vec4i是Vec
向量hiararchy内的元素和轮廓向量contours内的元素是一一对应的,向量的容量相同。
hierarchy向量内每一个元素的4个int型变量——hierarchy[i][0] ~hierarchy[i][3],分别表示第i个轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号。如果当前轮廓没有对应的后一个轮廓、前一个轮廓、父轮廓或内嵌轮廓的话,则hierarchy[i][0] ~hierarchy[i][3]的相应位被设置为默认值-1
第四个参数:int型的mode,定义轮廓的检索模式:
取值一:CV_RETR_EXTERNAL只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
取值二:CV_RETR_LIST 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,所以hierarchy向量内所有元素的第3、第4个分量都会被置为-1,具体下文会讲到
取值三:CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
取值四:CV_RETR_TREE, 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内层轮廓还可以继续包含内嵌轮廓
第五个参数:int型的method,定义轮廓的近似方法:
取值一:CV_CHAIN_APPROX_NONE 保存物体边界上所有连续的轮廓点到contours向量内
取值二:CV_CHAIN_APPROX_SIMPLE 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours向量内,拐点与拐点之间直线段上的信息点不予保留
取值三和四:CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
第六个参数:Point偏移量,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加上该偏移量,并且Point还可以是负值!(默认是没有偏移量)
这时再来看opencvsharp中的findContours参数就一目了然
![]()
下边用效果图对比一下findContours函数中各参数取不同值时,向量contours和hierarchy的内容如何变化,有何异同。
▶mode取值“RetrievalModes.External”,method取值“ContourApproximationModes.ApproxNone”,即只检测最外层轮廓,并且保存轮廓上所有点:
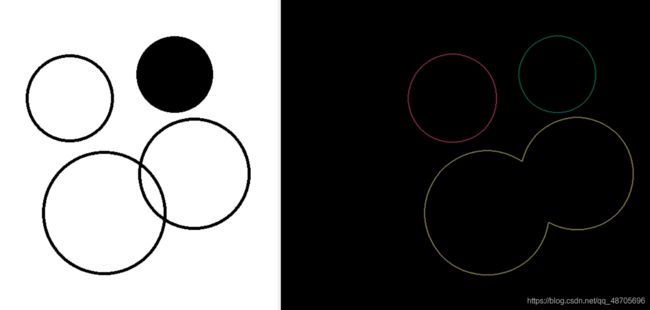
只有最外层的轮廓被检测到,内层的轮廓被忽略
▶mode取值“RetrievalModes.List”,method取值“ContourApproximationModes.ApproxSimple”,即检测所有轮廓,但各轮廓之间彼此独立,不建立等级关系,并且仅保存轮廓上拐点信息:
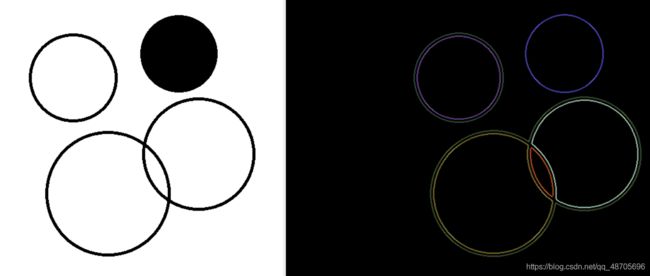
这里不大明显,见下面两图(←超链接):
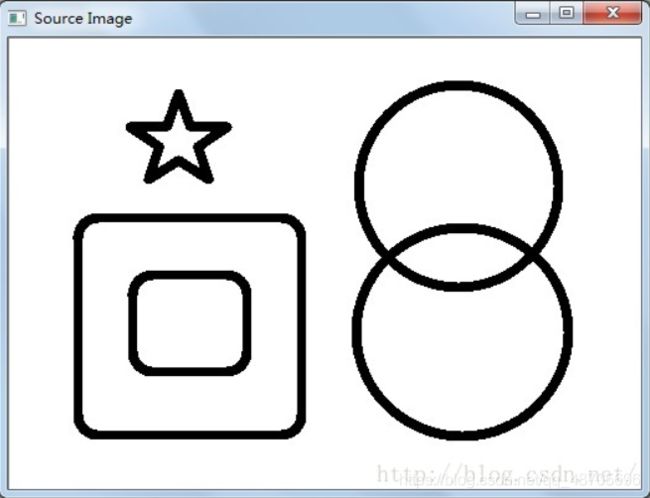
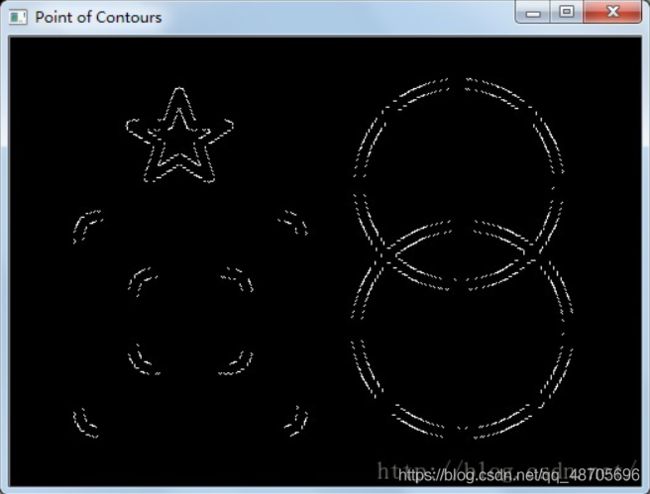
▶mode取值“RetrievalModes.Tree”,method取值“ContourApproximationModes.ApproxNone”,即检测所有轮廓,轮廓间建立外层、内层的等级关系,并且保存轮廓上所有点。
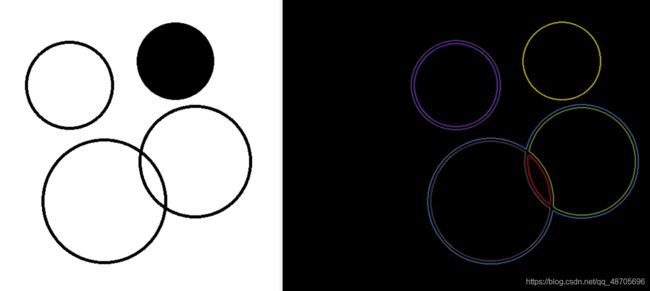
所有内外层轮廓都被检测到,contours点集组成的图形跟轮廓表现一致。