图像处理、分析与机器视觉(基于labview)_基于机器视觉的胚布疵点缺陷识别算法...
![]()
区域识别的目的是寻找并确定目标的分布位置与状态。目标区域的识别方法一般是先用二值化方法确定该区域,形成一个个斑点,然后使用适当的特征来描述这些斑点。为了能够较为精确地描述目标区域,通常要在二值化之前采取适当的办法来提升各区域的边界,即进行边缘检测。它与点检测、线检测统称为图像目标检测。边缘检测的方法比较多,如梯度估计!边缘特征模板与图像的卷积等,本文将该类算子分为两类,分别为常用的经典算子和一些特色检测算子。
在增强目标区域的边缘后,下一步将该边缘完整提取出来。提取边缘的过程实际上是阈值分割的过程。由于闭值分割比较重要,也容易操作,因此目前效果较好的阂值分割方法研究很多,如全局阈值分割方式、局部统计阈值分割、基于种子增长的阈值分割、自适应阈值分割、最优阈值分割等常用的分割方式。模糊闺值分割是现在研究的热点,它是在模糊理论的基础上提出的。因为目标的边缘本来就有一定的模糊性,特别是在多干扰的复杂图像中更是如此,而建立在模糊集基础上模糊阈值分割方式恰好可以解决这一问题。理论上讲,使用模糊集的实际分割具体效果好坏取决于能否选择合适的隶属函数,而这是非常困难的。本文提出一种基于自适应门限的疵点区域分割方法,实验证明其在复杂的背景中能很好地提取目标边缘。
经过阈值分割后的图像变为二值图像,实际上是一个个斑点。一般此时并不能直接提取斑点特征,其原因较多,如:阈值分割后的图像边缘并不一定是连续的,阈值分割后的边缘点可能需要纠正(并不一定完全反应边缘)、存在不期望的噪声点干扰等,因此,边缘提取后的图像需要一个后处理。后处理的方法可以采用形态学的方法、也可以是图论、向量机等。其后,是对各斑点进行标定和特征提取,其中比较耗时的是斑点标定。本文提出基于形态学的疵点快速标记算法和基于窗线扫面的疵点聚类方法,其执行效率会提高几倍,在斑点较多时可以提高几十倍甚至更高"疵点识别过程如图1所示。

图1疵点识别过程
1边缘增强
在基于机器视觉的坯布表面质量检测系统中,疵点通常是湮没在复杂的背景中,将疵点从其中分割出来是疵点检测最重要的问题。疵点的分割是否准确和稳定,以及分割方法对各种疵点的适应性都直接决定了检测系统的检测性能。合理的疵点边缘增强是确保准确检出疵点的有效手段。
1.1经典算子
(1)基于空间卷积的边缘检测方式
对于图像f(x,y),在坐标(x,y)上的梯度可通过一个二维列向量来定义。梯度向量是线性算子,向量的模则不是;梯度向量的偏导数并非各向同胜的,但梯度向量的模是各向同性的。习惯上把梯度向量的模称之为梯度。这个值计算起来较为简单,并且保持着灰度的相对变化,但各向同性特性消失了。除了来自信号处理的方法外,还有一些比较经验的一阶微商方法,比如对图像或其微商的局部估算。当然,如果噪声干扰较大时,应使用较大的滤波模板,这些模板是反对称的。以下是几种经常使用的一阶边缘检测算子,这些算子均为零相位滤波,即以一个像素点为中心。在具体操作时,用模板对应乘积,然后求和的绝对值。把模板旋转π/2,重复相同的操作。
实验1:将已知三种疵点(图2a、b、c)的图像分别运用RobertS算子、Prewit算子、Sobel算子进行边界检测效果如下:
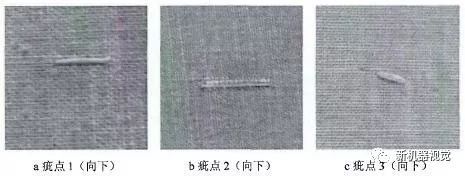
图2 不同边缘增强算子对坯布疵点检测效果比较图

图3 拉普拉斯算子边缘检测效果
图3为运用拉普拉斯算子对以上三种疵点(图2a、b、c)进行边缘检测的结果。可以发现拉普拉斯变换对噪声点非常敏感,使用之前应对图像先进行强平滑。通常平滑时使用较多的是高斯滤波器,因为它具有很多特性,如自复制性、可分离性、多项式序列的极限、样条逼近等,这些性质可以使得其实现更快。很多场合中,上述经典的边缘检测算子可以与某一基本的图像平滑算子做卷积运算,或以其它方式相组合,从而形成新的算子,LOG、SOG、DOG、DOB等。其中LOG与SOG分别是拉普拉斯算子、Sobel算子与低通高斯滤波卷积运算,相当于对图像做高斯滤波和拉普拉斯增强两种操作(注意卷积无先后),使用同样大小的模板可减少计算量,但效果较两种处理分别进行差。而DOG则是将两个高斯滤波器差分运算,它的波形与LOG相似,但能更好地模仿视觉系统。
(2)自适应检测算子
自适应边缘检测就是在边缘字典中,寻找符合当前状态的最佳模板。何时最佳,必须有一个测度函数,来衡量一种边缘与一个滤波后的窗之间的距离。如可用两个窗标量积来表示这个距离,设原图为f(x,y),第k个模板记为g(x,y),则对所有的k值。
(3)频域边缘检测方法
图像平滑是通过衰减傅里叶变换的高频成分来实现的,同样锐化图像的边缘也可以用衰减傅里叶域的低频成分保留某些高频成份来实现。在灰度级边缘和其它急剧变化的地方与高频部分相关,在频率内用高能滤波处理可以增强图像的边缘特征,并且衰减低频成分不会扰乱傅里叶域的高频信息。为了保持各向同性,一般使用零相移滤波器。一些常见的滤波器如理想高通滤波、巴特沃斯高通滤波、频域拉普拉斯算子、钝化模板等。
1.2坯布疵点边缘检测
观察去除纹理后的织物图像,从扫描线上可以看出目标并不是太突出,且还有大量的同类干扰。因此在二值化之前,有必要增强一下目标区域的边缘。考虑检测效果、执行效率、抑噪声能力等因素,下面选用Sobel算子、拉普拉斯算子、LOG算子、DOG算子进行实验研究,原图像为经过7x7模板的高斯低通滤波器处理后的图像,如图4所示。各算子均用提出的滤波类算子优化方法优化处理,它们的执行时间如表1所示。通过以上分析,可以看出Sobel算子在执行效果上最佳(取x与y方向上的最大值),执行效率也最高,为此,选择Sobel算子为自适应边缘检测算子。

图4 LOG算子、DOG算子、Sobel算子边缘检测效果比较
表1 运行时间(单位:毫秒)
算子 |
耗时量 |
LOG |
55 |
DOG |
58 |
Sobel |
34 |
2增强后边缘分割
2.1一般方法
边缘检测与闽值分割存在一些相似之处,通常将二者归为一类,统称为图像分割。严格意义上讲,边缘增强的目的不完全在于阈值分割,阈值分割的作用也不仅仅局限于提取图像的边缘,两者是独立的操作过程,但在实际操作中二者通常结合使用。
阈值分割又称为图像门限处理,因其直观和易于实现等性质,使它在图像分割应用中处于中心地位。分割后的图像便于用形态学!图论等方法处理,便于提取目标特征以用于模式识别,因而它具有十分重要的作用。
基本的分割原理与方法并不复杂,但实际操作中仍存在许多困难,这一直是国内外的研究热点。常用的阈值分割方法根据其闭值的选取方式可分为全局阈值分割、局部闭值分割、自适应阈值分割、最优闭值分割等几种,根据运算过程又可分为串行阈值分割方式和并行阈值分割方式。
2.2模糊阈值分割
概念是思维的基本形式之一,,它反映了客观事物的本质特征。一个概念有它的内涵和外延,内涵是指该概念所反映的事物本质属性的总和,也就是概念的内容。外延是一个概念所确定的对象的范围,所谓模糊概念是指这个概念的外延具有不确定性,或者说它的外延是不清晰的、模糊的。
一个模糊概念的外延是不分明的,因此在认识某一事物是否属于这一模糊概念时,不是要做出肯定或否定的结论,只要判别出该事物对这个概念的符合程度即可。于是产生了事物的隶属度,隶属度指事物隶属于这个模糊概念的程度,那么如果模糊概念的外延是一个模糊集合A,某一事物的隶属度可以记为:μA(x),它是随x变化而变化的一个关于x的函数,称为隶属函数。
目前,基于模糊理论的图像分割方法主要有模糊嫡闭值分割、模糊C均值分割(FcM)、直方图分割、基于模糊连接度图像分割、基于模糊神经网络的分割方法、基于专家知识库的分割方法等。由于模糊集合理论主要可解决模式识别中不同层次如信息不全面、不准确、含糊等不确定性问题,特别是模糊集合理论能较好的描述人类视觉中的模糊性和随机性,因而在图像分割的诸多方法中,模糊集合理论有着独特的优势。
3分割后图像的后处理
(l)常用方法
数学形态学的语言是集合论。形态学方法特别适于处理二值图像,在二维整数空间中,集合的每个元素是一个多元组。在之前的图像处理方法的输入与输出均为图像,而要与模式识别、人工智能等能够代表内涵的方法接口,需要一种中间方法。能够担此重任的就是形态学及相关方法。基于集合论的形态学方法是经常使用的。
(2)拓扑框架
在形态学中应用的两种拓扑分别为建立在闭集上的开关拓扑和定义在紧致集上的近视拓扑。近视拓扑学的优点是它与Hausdorff距离联系,在应用中适合于做形状比较计量。
(3)代数框架
代数框架一般用网格来描述。网格是一个带有次序关系的集合T,其中所有的元素对(或所有的有限系)都具有一个上限和一个下限。若整个元素系(有限的或无限的)具有一个最小的上界和一个最大的下界,则网格是完备的。特别的,一个完备的网格包含一个最小元素和一个最大元素。
4.小结
本章主要研究疵点区域识别算法。针对坯布纹理图像的特点,研究了一种适合在非规则纹理图像中寻找目标区域的基于自适应门限的疵点区域分割方法;根据疵点特征类型及其区域识别的需要,提出了用矩形窗沿直线扫描,通过计算窗内斑点的总面积来确定是否保留直线上该点的窗线扫描方法,解决了预处理后图像中疵点信息断裂的难题。
推荐阅读
(点击标题可跳转阅读)
最详细、最完整的相机标定讲解
深度学习+机器视觉=下一代检测
视觉检测系统最经典的结构你了解吗?
机器视觉技术的十大应用领域
工业相机和普通相机究竟有什么不同?
基于机器视觉和深度学习的智能缺陷检测
波士顿等移动机器人的视觉算法解析
2020年37个人工智能技术发展趋势
机器视觉的光源选型及打光方案分析
光学三维测量技术及应用
国内80%搞机器视觉的工程师,走的路子是错的!
视觉+机器人,如何实现连接器的自动装配?
机器视觉技术发展的五大趋势
搞懂机器视觉基本内容,这份PPT就够了
机器视觉:PC式视觉系统与嵌入式视觉系统区别
基于HALCON的机器视觉开发,C++或C#如何选择?
3D视觉技术在机器人抓取作业中的应用实例
基于机器视觉的粗糙度检测方案
机器视觉常用图像软件对比及分析
工业相机编程流程及SDK接口使用汇总
![]() End
End ![]()
商务合作:QQ:1504328545
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
更多是视觉资讯尽在“新机器视觉”微信公众号~
