第十届蓝桥杯嵌入式国赛(STM32G4及HAL库)
前言
本程序基于STM32G431RB开发,使用工具为STM32CubeMX + Keil MDK 5 + HAL库。
题目说明


实现程序
为了方便提交,或者说不容易遗漏,本工程将绝大部分实现代码写在main.c文件中.
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
#include "ds18b20.h"
#include "i2c - hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define RCLK_PIN GPIO_PIN_2
#define SER_PIN GPIO_PIN_1
#define SCK_PIN GPIO_PIN_3
#define RCLK_H HAL_GPIO_WritePin(GPIOA, RCLK_PIN, GPIO_PIN_SET)
#define RCLK_L HAL_GPIO_WritePin(GPIOA, RCLK_PIN, GPIO_PIN_RESET)
#define SER_H HAL_GPIO_WritePin(GPIOA, SER_PIN, GPIO_PIN_SET)
#define SER_L HAL_GPIO_WritePin(GPIOA, SER_PIN, GPIO_PIN_RESET)
#define SCK_H HAL_GPIO_WritePin(GPIOA, SCK_PIN, GPIO_PIN_SET)
#define SCK_L HAL_GPIO_WritePin(GPIOA, SCK_PIN, GPIO_PIN_RESET)
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
ADC_HandleTypeDef hadc2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
char Text_buff[30]; //显示用
double AO1_Val = 0; //AO1电压值
double AO2_Val = 0;
uint8_t PWM2_zkb = 0;
double Temp_Val = 0;
uint16_t G_num = 0;
uint8_t Key1_Flag = 0;
uint8_t Key2_Flag = 0;
uint8_t Key3_Flag = 0;
uint8_t Key4_Flag = 0;
uint16_t IC3ReadValue1 = 0, IC3ReadValue2 = 0;
uint16_t CaptureNumber = 0;
uint32_t TIM3Freq = 0;
double TIM3Duty = 0;
uint32_t Capture_High = 0;
uint32_t Capture_Low = 0;
uint8_t Temp_Para = 30;
uint8_t X_Para = 0;
uint32_t Time = 0;
uint8_t mode = 0;
uc8 Seg7[17] = {
0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f,
0x6f, 0x77, 0x7c, 0x39, 0x5e, 0x79, 0x71, 0x00};
uint8_t SEG_Flag = 0;
uint16_t ch = 0;
char rxbuff[30];
char RxBuff[30];
uint8_t Print_Flag = 0;
uint8_t N_Flag = 0;
uint8_t LED_8_Flag = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC2_Init(void);
static void MX_TIM3_Init(void);
static void MX_TIM4_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//获取ADC
double GetADC(uint32_t ch)
{
ADC_ChannelConfTypeDef sConfig = {
0};
sConfig.Channel = ch;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_247CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
HAL_ADC_Start(&hadc2);
HAL_ADC_PollForConversion(&hadc2,10);
uint16_t adc = HAL_ADC_GetValue(&hadc2);
return (adc*3.3/4096);
}
均值滤波
//u16 ADC_Average(u32 ch, u8 times)
//{
// u32 temp_val = 0;
// u8 t;
// for(t = 0; t < times; t++){
// temp_val += GetADC(ch);
// HAL_Delay(5);
// }
//
// return temp_val/times;
//
//}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim -> Instance == TIM3)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
if(CaptureNumber == 0)
{
IC3ReadValue1 = TIM3->CCR2;
CaptureNumber = 1;
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_2,TIM_INPUTCHANNELPOLARITY_FALLING);
}
else if(CaptureNumber == 1)
{
IC3ReadValue2 = TIM3->CCR2;
CaptureNumber = 2;
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_2,TIM_INPUTCHANNELPOLARITY_RISING);
if (IC3ReadValue2 > IC3ReadValue1)
{
Capture_High = (IC3ReadValue2 - IC3ReadValue1);
}
else
{
Capture_High = ((0xFFFF - IC3ReadValue1) + IC3ReadValue2);
}
IC3ReadValue1 = IC3ReadValue2;
}
else if(CaptureNumber == 2)
{
IC3ReadValue2 = TIM3->CCR2;
CaptureNumber = 0;
if (IC3ReadValue2 > IC3ReadValue1)
{
Capture_Low = (IC3ReadValue2 - IC3ReadValue1);
}
else
{
Capture_Low = ((0xFFFF - IC3ReadValue1) + IC3ReadValue2);
}
TIM3Freq = (uint32_t) 1000000 / (Capture_Low + Capture_High);
TIM3Duty = Capture_High * 1.0 / (Capture_Low + Capture_High);
}
}
}
}
double GetTemp()
{
u16 read = (ds18b20_read() & 0x07FF);
return (read/16.);
}
//主界面
void MainDisplay()
{
//赋值
AO1_Val = GetADC(ADC_CHANNEL_17);
AO2_Val = GetADC(ADC_CHANNEL_13);
PWM2_zkb = TIM3Duty * 100 ;
Temp_Val = GetTemp();
//显示部分
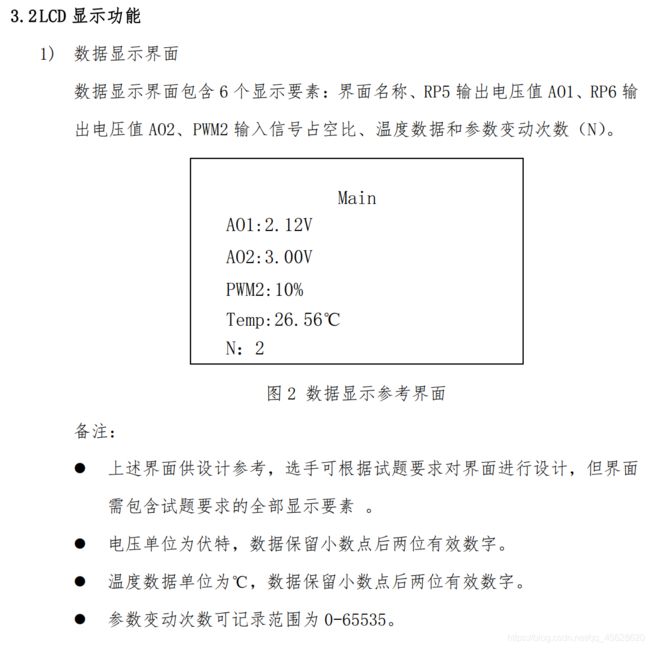
LCD_DisplayStringLine(Line1,(uint8_t *)" Main ");
sprintf(Text_buff," AO1:%.2f V ",AO1_Val);
LCD_DisplayStringLine(Line2,(uint8_t *)Text_buff);
sprintf(Text_buff," AO2:%.2f V ",AO2_Val);
LCD_DisplayStringLine(Line3,(uint8_t *)Text_buff);
sprintf(Text_buff," PWM2:%d %% ",PWM2_zkb);
LCD_DisplayStringLine(Line4,(uint8_t *)Text_buff);
sprintf(Text_buff," Temp:%.2f 'C ",Temp_Val);
LCD_DisplayStringLine(Line5,(uint8_t *)Text_buff);
sprintf(Text_buff," N:%d ",G_num);
LCD_DisplayStringLine(Line7,(uint8_t *)Text_buff);
}
//参数配置界面
void ParaDisply()
{
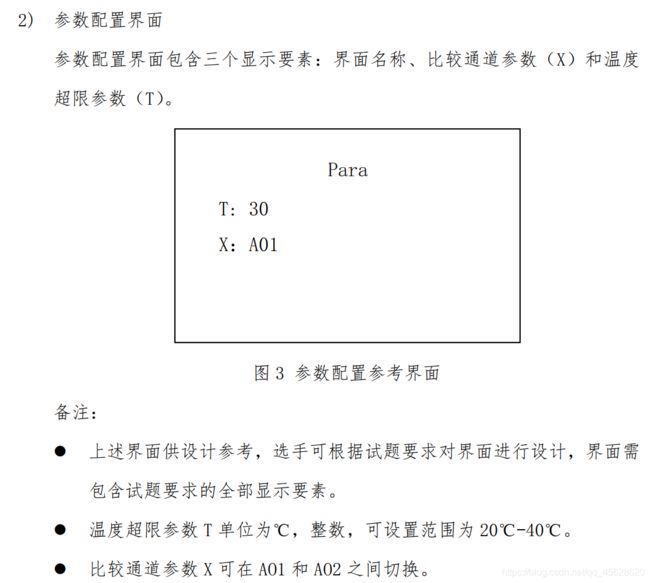
LCD_DisplayStringLine(Line1,(uint8_t *)" Para ");
sprintf(Text_buff," T:%d ",Temp_Para);
if(Key2_Flag == 1){
LCD_SetBackColor(Yellow);
LCD_DisplayStringLine(Line2,(uint8_t *)Text_buff);
LCD_SetBackColor(Blue);
}else{
LCD_DisplayStringLine(Line2,(uint8_t *)Text_buff);
}
sprintf(Text_buff," X:AO%d ",X_Para+1);
if(Key2_Flag == 2){
LCD_SetBackColor(Yellow);
LCD_DisplayStringLine(Line3,(uint8_t *)Text_buff);
LCD_SetBackColor(Blue);
}else{
LCD_DisplayStringLine(Line3,(uint8_t *)Text_buff);
}
LCD_DisplayStringLine(Line4,(uint8_t *)" ");
LCD_DisplayStringLine(Line5,(uint8_t *)" ");
LCD_DisplayStringLine(Line7,(uint8_t *)" ");
}
//定时1ms
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint16_t TIM4_Cnt1 = 0;
static uint16_t SEG_Cnt1 = 0;
static uint16_t Print_Cnt1 = 0;
static uint16_t LED_Cnt1 = 0;
if(htim->Instance == TIM4){
TIM4_Cnt1++;
if(TIM4_Cnt1 >= 100){
TIM4_Cnt1 = 0;
SEG_Cnt1++;
Print_Cnt1++;
LED_Cnt1++;
if(LED_Cnt1 >= 8){
LED_Cnt1 = 0;
LED_8_Flag = !LED_8_Flag;
}
if(Print_Cnt1 >= 10){
Print_Cnt1 = 0;
Print_Flag = 1;
}
if(SEG_Cnt1 >= 20){
SEG_Cnt1 = 0;
SEG_Flag = !SEG_Flag;
}
Time++;
}
}
}
void KeyScan(){
static u8 key_up=1; //按键松开标志
static u8 key_ups=1;
if(key_ups && (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == RESET
|| HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == RESET )){
Time = 0;
key_ups = 0;
N_Flag = 1;
}else if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == SET
&& HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == SET){
key_ups = 1;
}
if(Time >= 8) mode = 1;
else mode = 0;
if(Time > 5000) Time = 0;
if(mode == 1) key_up = 1;
if(key_up && (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == RESET
|| HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == RESET)){
key_up = 0;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == RESET){
if(Key2_Flag == 1){
Temp_Para++;
if(Temp_Para > 40){
Temp_Para = 40;
}
}
if(Key2_Flag == 2){
X_Para = !X_Para;
}
}
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == RESET){
if(Key2_Flag == 1){
Temp_Para--;
if(Temp_Para < 20){
Temp_Para = 20;
}
}
if(Key2_Flag == 2){
X_Para = !X_Para;
}
}
}
else if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == SET
&& HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == SET){
key_up = 1;
}
}
void SEG_Display(u8 Bit1, u8 Bit2, u8 Bit3)
{
u8 i = 0;
u8 code_tmp = 0;
RCLK_L;
code_tmp = Seg7[Bit3];
for(i = 0; i < 8; i++){
SCK_L;
if(code_tmp & 0x80){
SER_H;
}
else{
SER_L;
}
code_tmp = code_tmp << 1;
SCK_L;
SCK_H;
}
code_tmp = Seg7[Bit2];
for(i = 0; i < 8; i++){
SCK_L;
if(code_tmp & 0x80){
SER_H;
}
else{
SER_L;
}
code_tmp = code_tmp << 1;
SCK_L;
SCK_H;
}
code_tmp = Seg7[Bit1];
for(i = 0; i < 8; i++){
SCK_L;
if(code_tmp & 0x80){
SER_H;
}
else{
SER_L;
}
code_tmp = code_tmp << 1;
SCK_L;
SCK_H;
}
RCLK_L;
RCLK_H;
}
void SEG()
{
if(SEG_Flag == 0){
u8 SEG_temp_1 = Temp_Para/10;
u8 SEG_temp_2 = Temp_Para%10;
SEG_Display(12, SEG_temp_1, SEG_temp_2);
}
else{
SEG_Display(10, 0, X_Para+1);
}
}
void My_Printf()
{
if(X_Para == 0 && (AO1_Val > (TIM3Duty * 3.3)) ){
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15
| GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
if(Print_Flag == 1){
printf("$%.2f\r\n",Temp_Val);
Print_Flag = 0;
}
}
if(X_Para == 1 && (AO2_Val > (TIM3Duty * 3.3))){
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15
| GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
if( Print_Flag == 1){
printf("$%.2f\r\n",Temp_Val);
Print_Flag = 0;
}
}
if( ( ( X_Para == 0 && (AO1_Val > (TIM3Duty * 3.3))) || (X_Para == 1 && (AO2_Val > (TIM3Duty * 3.3))) ) == 0){
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15
| GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
}
void My_Getchar()
{
if(strcmp(RxBuff, "ST") == 0){
printf("$%.2f\r\n",Temp_Val);
memset(RxBuff,0,sizeof(RxBuff));
}
if(strcmp(RxBuff, "PARA") == 0){
printf("#%d,A0%d\r\n",Temp_Para,X_Para+1);
memset(RxBuff,0,sizeof(RxBuff));
}
}
uint8_t M24C02_Read(unsigned char address)
{
unsigned char val;
I2CStart(); //IIC开始
I2CSendByte(0xa0); //测试状态
I2CWaitAck(); //等待相应
I2CSendByte(address); //发送要读取的地址
I2CWaitAck(); //等待相应
I2CStart();
I2CSendByte(0xa1); //告诉24C02要读数据
I2CWaitAck(); //等待相应
val = I2CReceiveByte(); //返回要读取的值
I2CWaitAck(); //等待相应
I2CStop(); //停止
return val;
}
void M24C02_Write(unsigned char address, uint16_t info)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
void IIC_NUM(){
if(N_Flag == 1 && Key2_Flag == 0){
G_num++;
M24C02_Write(0x00,G_num);
N_Flag = 0;
}
}
void LCD_cls(void)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15 | GPIO_PIN_8
| GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
void LED_8()
{
if(Temp_Val > Temp_Para && LED_8_Flag == 1){
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_15);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
else{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_15 , GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM3_Init();
MX_TIM4_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
ds18b20_init_x();
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim4);
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE);
I2CInit();
LCD_cls();
//LCD屏初始化
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
G_num = M24C02_Read(0x00);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(Key1_Flag == 0){
MainDisplay();
}
SEG();
My_Printf();
My_Getchar();
LED_8();
if(Key1_Flag == 1){
ParaDisply();
KeyScan();
}
IIC_NUM();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {
0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1|RCC_PERIPHCLK_ADC12;
PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief ADC2 Initialization Function
* @param None
* @retval None
*/
static void MX_ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Common config
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.GainCompensation = 0;
hadc2.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc2.Init.LowPowerAutoWait = DISABLE;
hadc2.Init.ContinuousConvMode = DISABLE;
hadc2.Init.NbrOfConversion = 1;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc2.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc2.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_IC_InitTypeDef sConfigIC = {
0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 79;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
/**
* @brief TIM4 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {
0};
TIM_MasterConfigTypeDef sMasterConfig = {
0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 79;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 999;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pins : PC13 PC14 PC15 PC8
PC9 PC10 PC11 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PA1 PA2 PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PB0 PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PC12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PD2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/*Configure GPIO pins : PB6 PB7 */
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI0_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
HAL_NVIC_SetPriority(EXTI1_IRQn, 3, 1);
HAL_NVIC_EnableIRQ(EXTI1_IRQn);
}
/* USER CODE BEGIN 4 */
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
/* USER CODE END EXTI0_IRQn 0 */
//HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* USER CODE BEGIN EXTI0_IRQn 1 */
if(__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_0) != RESET){
Key1_Flag = !Key1_Flag;
Key2_Flag = 0;
HAL_Delay(4);
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_0);
}
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
//HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
/* USER CODE BEGIN EXTI1_IRQn 1 */
if(__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_1) != RESET){
Key2_Flag++;
if(Key2_Flag > 2){
Key2_Flag = 0;
}
HAL_Delay(5);
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_1);
}
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles TIM4 global interrupt.
*/
void TIM4_IRQHandler(void)
{
/* USER CODE BEGIN TIM4_IRQn 0 */
/* USER CODE END TIM4_IRQn 0 */
HAL_TIM_IRQHandler(&htim4);
/* USER CODE BEGIN TIM4_IRQn 1 */
/* USER CODE END TIM4_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt / USART1 wake-up interrupt through EXTI line 25.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
//HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
static u8 index = 0;
if(__HAL_UART_GET_FLAG( &huart1, UART_FLAG_RXNE ) != RESET){
ch = (uint16_t)READ_REG(huart1.Instance->RDR);
rxbuff[index] = ch;
if(rxbuff[index] == '\n'){
rxbuff[index] = '\0';
rxbuff[index - 1] = '\0';
index = 0;
strcpy(RxBuff,rxbuff);
memset(rxbuff,0,sizeof(rxbuff));
return;
}
index++;
}
/* USER CODE END USART1_IRQn 1 */
}
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 1000);
return (ch);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
最后
准备的比较仓促,代码肯有点小乱,不懂得可以私信。若有错误,多多指点!