本篇文章介绍MoveIt!在实际开发中需要注意的一些潜规则,官方文档未提到但在实际工作中有用的一些技能。
一、圆弧轨迹规划
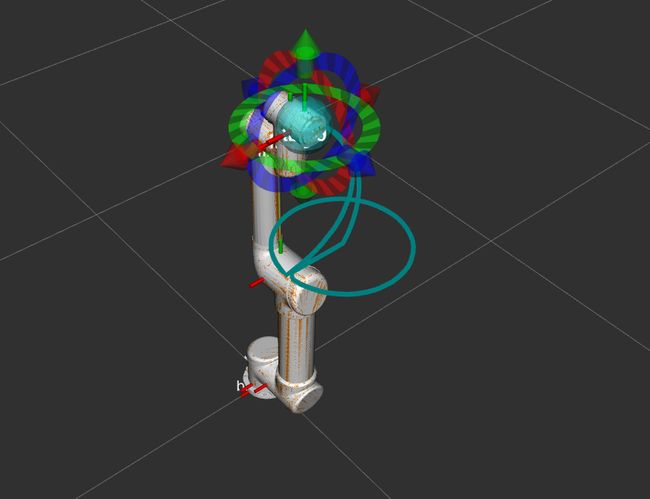
上一篇中介绍了直线插补,将waypoints用直线连接,而圆弧轨迹插补API是未提供的,实际中比如焊接是需要这样的轨迹的,我们自己需要实现。方法是用很多直线段模拟圆弧,取点越多越接近实际圆弧:

直接看代码:
#include
#include
#include
#include
using namespace std;
int main(int argc, char **argv)
{
ros::init(argc, argv, "move_with_circle");
ros::AsyncSpinner spinner(1);
spinner.start();
moveit::planning_interface::MoveGroupInterface ur5("manipulator");
string eef_link = ur5.getEndEffector();
std::string reference_frame = "base_link";
ur5.setPoseReferenceFrame(reference_frame);
ur5.allowReplanning(true);
ur5.setGoalPositionTolerance(0.001);
ur5.setGoalOrientationTolerance(0.01);
ur5.setMaxAccelerationScalingFactor(0.8);
ur5.setMaxVelocityScalingFactor(0.8);
// 控制机械臂先回到初始化位置
ur5.setNamedTarget("home");
ur5.move();
sleep(1);
geometry_msgs::Pose target_pose;
target_pose.orientation.x = 0.70711;
target_pose.orientation.y = 0;
target_pose.orientation.z = 0;
target_pose.orientation.w = 0.70711;
target_pose.position.x = 0.070859;
target_pose.position.y = 0.36739;
target_pose.position.z = 0.84716;
ur5.setPoseTarget(target_pose);
ur5.move();
vector waypoints;
waypoints.push_back(target_pose);
//在xy平面内生成一个圆周
double centerA = target_pose.position.x;
double centerB = target_pose.position.y;
double radius = 0.15;
for(double theta = 0.0; theta < M_PI*2; theta += 0.01)
{
target_pose.position.x = centerA + radius * cos(theta);
target_pose.position.y = centerB + radius * sin(theta);
waypoints.push_back(target_pose);
}
// 笛卡尔空间下的路径规划
moveit_msgs::RobotTrajectory trajectory;
const double jump_threshold = 0.0;
const double eef_step = 0.01;
double fraction = 0.0;
int maxtries = 100; //最大尝试规划次数
int attempts = 0; //已经尝试规划次数
while(fraction < 1.0 && attempts < maxtries)
{
fraction = ur5.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory);
attempts++;
if(attempts % 10 == 0)
ROS_INFO("Still trying after %d attempts...", attempts);
}
if(fraction == 1)
{
ROS_INFO("Path computed successfully. Moving the arm.");
// 生成机械臂的运动规划数据
moveit::planning_interface::MoveGroupInterface::Plan plan;
plan.trajectory_ = trajectory;
// 执行运动
ur5.execute(plan);
sleep(1);
}
else
{
ROS_INFO("Path planning failed with only %0.6f success after %d attempts.", fraction, maxtries);
}
// 控制机械臂先回到初始化位置
ur5.setNamedTarget("home");
ur5.move();
sleep(1);
ros::shutdown();
return 0;
}
代码做的工作:在圆弧上均匀采样,将位置依次添加到路点,最后调用直线路径规划API实现圆弧运动。将终端轨迹显示出来如图:
二、轨迹重定义
如果对规划出来的轨迹不是很满意,我们可以在plan和execute之间对轨迹进行修改。这里以删除轨迹中的中间点为例,对轨迹进行重定义。
首先调用moveit的API规划得到一条路径plan(轨迹规划):
MoveGroupInterface::Plan plan;
MoveItErrorCode success = ur5.plan(plan);
接着调用delete_trajectory(plan, 4);对plan每隔四个点删除一个(轨迹重定义):
void delete_trajectory(MoveGroupInterface::Plan& plan, unsigned gap)
{
unsigned count = 0;
auto i = plan.trajectory_.joint_trajectory.points.begin();
while(i < plan.trajectory_.joint_trajectory.points.end())
{
//每gap个元素删除一次,保留首尾
if(count % gap == 0 && count != 0)
{
//尾元素保留
if(i == plan.trajectory_.joint_trajectory.points.end() - 1)
break;
i = plan.trajectory_.joint_trajectory.points.erase(i);
}
else
i++;
count++;
}
}
经删除后的轨迹仍旧可以运行:

三、多轨迹连续运动
如何让机械臂在各段轨迹之间不停顿,一气呵成完成所有轨迹的运动?MoveIt本身是没有此功能的,因为MoveIt规划出来的轨迹一定是从速度0到0的轨迹,我们需要重新组合API的调用来实现多轨迹连续运动。实现方法是将规划得到的多条轨迹拼接成一条,然后对这一条轨迹中的速度,加速度进行重新规划,成为一条完整的轨迹,关键就在于如何重规划。本文给出用时间最优算法对拼接的轨迹进行重规划,当然也可以用其它算法实现。
利用时间最优算法重规划
#include
#include
#include
#include
#include
int main(int argc, char **argv)
{
ros::init(argc, argv, "moveit_continue_trajectory_demo");
ros::NodeHandle node_handle;
ros::AsyncSpinner spinner(1);
spinner.start();
moveit::planning_interface::MoveGroupInterface ur5("manipulator");
double accScale = 0.8;
double velScale = 0.8;
ur5.setMaxAccelerationScalingFactor(accScale);
ur5.setMaxVelocityScalingFactor(velScale);
ur5.setGoalPositionTolerance(0.001);
ur5.setGoalOrientationTolerance(0.01);
// 控制机械臂先回到初始化位置
ur5.setNamedTarget("home");
ur5.move();
sleep(1);
std::string end_effector_link = ur5.getEndEffectorLink();
//设置目标位置所使用的参考坐标系
std::string reference_frame = "base_link";
ur5.setPoseReferenceFrame(reference_frame);
//当运动规划失败后,允许重新规划
ur5.allowReplanning(true);
geometry_msgs::Pose target_pose;
target_pose.position.x = -0.093;
target_pose.position.y = 0.46713;
target_pose.position.z = 0.84616;
target_pose.orientation.x = 0.7071;
target_pose.orientation.y = 0;
target_pose.orientation.z = 0;
target_pose.orientation.w = 0.7071;
ur5.setPoseTarget(target_pose);
moveit::planning_interface::MoveGroupInterface::Plan plan1;
moveit::planning_interface::MoveItErrorCode success1 = ur5.plan(plan1);
ROS_INFO("Plan1 (pose goal) %s", success1 ? "SUCCESS":"FAILED");
if(success1)
ur5.execute(plan1);
sleep(1);
target_pose.position.x = -0.13995;
target_pose.position.y = 0.68947;
target_pose.position.z = 0.64173;
ur5.setPoseTarget(target_pose);
moveit::planning_interface::MoveGroupInterface::Plan plan2;
moveit::planning_interface::MoveItErrorCode success2 = ur5.plan(plan2);
ROS_INFO("Plan2 (pose goal) %s", success2 ? "SUCCESS":"FAILED");
if(success2)
ur5.execute(plan2);
sleep(1);
// 控制机械臂回到初始化位置
ur5.setNamedTarget("home");
ur5.move();
sleep(1);
//连接两条轨迹
moveit_msgs::RobotTrajectory trajectory;
trajectory.joint_trajectory.joint_names = plan1.trajectory_.joint_trajectory.joint_names;
trajectory.joint_trajectory.points = plan1.trajectory_.joint_trajectory.points;
for(unsigned i = 0; i < plan2.trajectory_.joint_trajectory.points.size(); i++)
{
trajectory.joint_trajectory.points.push_back(plan2.trajectory_.joint_trajectory.points[i]);
}
//采用时间最优算法对轨迹重规划
moveit::planning_interface::MoveGroupInterface::Plan joinedPlan;
robot_trajectory::RobotTrajectory rt(ur5.getCurrentState()->getRobotModel(), "manipulator");
rt.setRobotTrajectoryMsg(*ur5.getCurrentState(), trajectory);
trajectory_processing::IterativeParabolicTimeParameterization iptp;
iptp.computeTimeStamps(rt, velScale, accScale);
rt.getRobotTrajectoryMsg(joinedPlan.trajectory_);
if (!ur5.execute(joinedPlan))
{
ROS_ERROR("Failed to execute plan");
return false;
}
sleep(1);
ROS_INFO("Finished");
ros::shutdown();
return 0;
}
运行效果如图,可以看出两条轨迹之间的停顿已经消除,机械臂一气呵成完成整个动作。
四、更换运动学插件
通过一系列运动学插件实现正逆运动学计算,常用的有三种:
KDL求解器
来自于orocos框架,数值解,能求解封闭情况下的逆运动学,但速度慢,失败率高Track-IK
也是数值解,但做了一些优化,速度和成功率比KDL高
安装
i5@i5-ThinkPad-T460p:~$ sudo apt-get install ros-kinetic-trac-ik-kinematics-plugin
配置
修改kinematics.yaml,将solver改为track_ik_kinematics_plugin/TRAC_IKKinematicsPlugin

测试
i5@i5-ThinkPad-T460p:~/ws_moveit/src/ur5_moveit_config$ roslaunch probot_anno_moveit_config demo.launch
启动过程中看到kinematics_solver加载成功

- IKFast
由Rosen编写,可求解任意复杂运动链的运动学方程解析解,产生特定语言(如C++)文件供使用,稳定,速度快,最新处理器可在5us完成计算。但得到的解并非唯一,需要自己写选解的算法,一般选取与当前位置最接近的解。由于IKFast配置过程比较复杂,将在另一片文章中介绍。