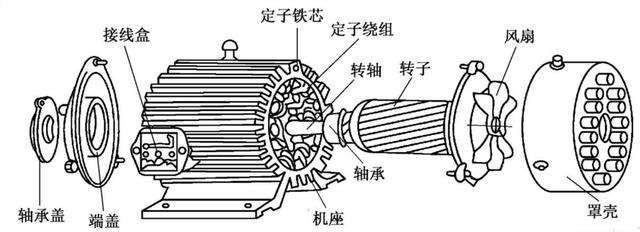
电机(Electric machinery,马达),是指依据电磁感应定律实现电能转换或传递的一种电磁装置。主要由定子(定子铁心、定子绕组、机座)、转子(转子铁心、转子绕组)组成。
1.按工作电源种类划分:可分为直流电机和交流电机。
2.按用途可划分:驱动用电动机和控制用电动机。
1)驱动用电动机可划分:电动工具(包括钻孔、抛光等工具)用电动机、家电(包括洗衣机、电风扇、、电动剃须刀等)用电动机。
2)控制用电动机又划分:步进电动机和伺服电动机等。
步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
伺服电机(servo motor )是指在伺服系统(又叫随动系统,使物体的输出能够跟随输入量(给定值)的任意变化而变化的自动控制系统)中控制机械元件运转的发动机。
步进电机
参考:一文理解步进电机

步进电机控制系统:
- 步进电机控制器 :指挥中心,发送信号脉冲给驱动器;可以通过控制脉冲数量来控制步进电机的旋转角度,从而准确控制电机转动。通过控制脉冲频率精确控制步进电机的旋转速度。
- 步进电机驱动器:脉冲信号转为电奶冻,驱动电机转动
- 步进电机:给一个脉冲信号就转动一个角度,旋转的角度时固定的一步一步执行的。
步进电机的结构及工作原理
电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向相反。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
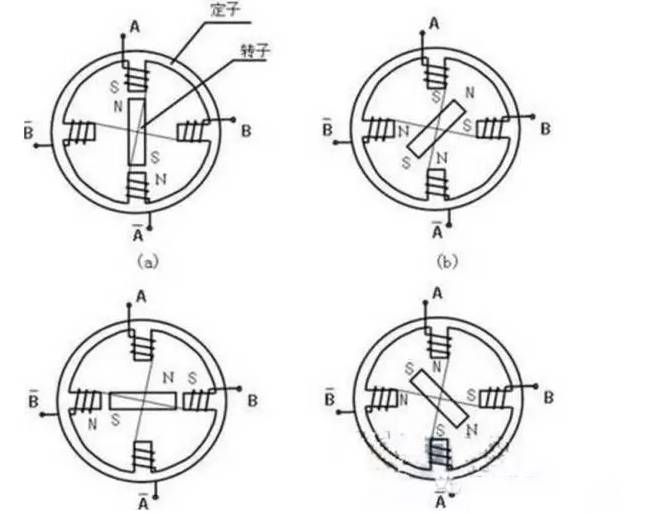
定子为铁芯,A A-,B B-绕在铁芯上,通电之后产生磁场变成电磁铁,转子为永磁体,磁场将对转自产生吸引或者排斥。
左上图A A-吸引转子,使得转子竖直(此时只有A A-通电)当B B-也通电后,B B-也产生磁场,此时转自将像A B中间区域偏转,具体偏转角度跟A B上电流大小比例有关。
左下图此时A A-断电,B B-继续通电,则转子被吸引到水平位置。
右下图此时A A-反向通电,B B-继续通电,则转自顺时针旋转。
重复以上过程,则转子可以进行旋转运动;控制通电的时机以及顺序,便可以达到控制步进电机旋转角度。
定子绕组:定子每极上套有一个集中绕组,相对两极的绕组串联构成一相。
指标术语
相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
步距角:定子控制绕组每改变一次通电方式,称为一拍。每一拍转子转过的机械角度称之为步距角,通常用θs表示,步距角θs=360度/(转子齿数×运行拍数)。以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(504)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
转速:n=60×脉冲频率/(转子齿数×运行拍数)
直流电机
直流电机(direct current machine)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
直流电机主要组成结构:
定子:(1)主磁极(磁极铁心和励磁绕组两部分组成)(2)机座(3)电刷装置
转子:(1)电枢铁心(2)电枢绕组(3)换向器(4)转轴
直流电机的结构应由定子和转子两大部分组成。
直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。
直流发电机的工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。
当使用一个线圈时,当线圈差不多垂直永磁铁时,扭矩差不多为0。因此,使用直流电机的时候,线圈的运动会不平稳。改进方法为再加一个线圈(换向器),线圈的数量越多,电机的转动越平稳。
不同于其他的电机,直流电机有反电动势,根据法拉利定律,磁场的变化会产生与外部相反的电动势,会影响电流的大小,反电动势的大小与转述成正比。
PWM控制直流电机:
想要调节电机的转速,只需要控制电机两端的电压即可。只要改变PWM信号的占空比,就可以改变直流电机两端的平均电压,从而实现直流电机的调速。
控制步进电机
步进电机的控制与脉冲有关。
一般二相电机的步距角为0.9/1,8,三相为0.36/0.72,五相为0.36/0.72。在没有细分驱动器的情况下,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,那么相数就没有了意义。
/* 假设齿数为50,两相,所以步数 : 360/1.8 -> 200 */
for(i=0;i<200;i++){
step(i%4);
delay(1);
}
/* 正转四拍:A 1000; A- 0010; B 0100; B-0001;
假设:GPIOA0 = A; GPIOA1 = B; GPIOA2 = A-; GPIOA3 = B-; */
void step(uint8_t step_parm){
switch(step_parm)
{
case 0:
GPIO_WritenPin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
GPIO_WritenPin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
break;
case 1:
GPIO_WritenPin(GPIOA,GPIO_PIN_0,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET);
GPIO_WritenPin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
break;
case 2:
GPIO_WritenPin(GPIOA,GPIO_PIN_0,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
GPIO_WritenPin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
break;
case 3:
GPIO_WritenPin(GPIOA,GPIO_PIN_0,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET);
GPIO_WritenPin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
break;
}
}