OpenCV基础(7)OpenCV中的颜色空间
在本教程中,我们将学习计算机视觉中常用的颜色空间,并使用它进行基于颜色的分割。我们还将共享c++和Python的演示代码。
我们在许多计算机视觉应用中都遇到了这个问题,包括肤色检测、交通灯识别等基于颜色的分割。让我们看看如何帮助他为他的机器人建立一个强大的颜色检测系统。
文章组织如下:
- 首先,我们将看到如何读取OpenCV中的图像,并将其转换为不同的颜色空间,并看看每个颜色空间的不同通道为我们提供了什么新信息。
- 我们将采用一种简单的颜色分割算法,并仔细考虑其缺点。
- 然后我们将进入一些分析,并使用系统的方法进行选择:(1)正确的颜色空间。(2)正确的分割阈值。
1.不同的颜色空间
在本节中,我们将介绍计算机视觉中使用的一些重要的颜色空间。我们不会描述它们背后的理论,因为它可以在维基百科上找到。相反,我们将建立一个基本的直觉,并学习一些重要的性质,这将对以后的决策有用。
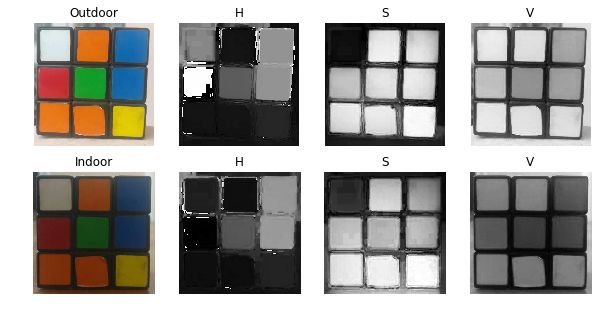
让我们加载两个相同立方体的图像。默认情况下以BGR格式加载。我们可以使用OpenCV函数cvtColor()在不同的颜色空间之间进行转换,稍后会展示。
第一幅图像是在阳光明媚的室外条件下拍摄的,第二幅是在室内正常光照条件下拍摄的。


(1)RGB颜色空间
RGB颜色空间具有以下属性:
- 它是一个加性色彩空间,其中颜色由红色、绿色和蓝色值的线性组合获得。
- 这三个通道是由照射到表面的光线量关联起来的。
让我们将这两幅图像分割成R、G和B分量,并观察它们,以更深入地了解颜色空间。
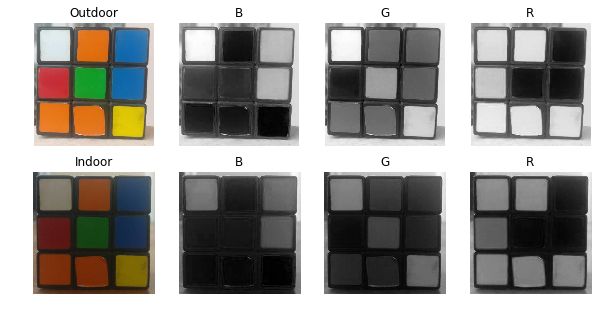
观测
如果你看蓝色通道,可以看到,在室内光照条件下,第二幅图像中的蓝色和白色片段看起来很相似,但在第一幅图像中有明显的区别。这种不均匀性使得基于颜色的分割在这个颜色空间中非常困难。此外,两幅图像的值之间存在整体差异。下面我们总结了RGB颜色空间的内在问题: - 重要的知觉不均匀
- 混合色度(颜色相关信息)和亮度(强度相关信息)数据。
(2)LAB色彩空间
LAB颜色空间有三个组成部分。
- L:亮度(强度)。
- a:颜色成分从绿色到品红不等。
- b:颜色成分范围从蓝色到黄色。
LAB颜色空间与RGB颜色空间有很大的不同。在RGB颜色空间中,颜色信息被分为三个通道,但同样的三个通道也编码亮度信息。另一方面,在Lab颜色空间中,L通道与颜色信息无关,只对亮度进行编码。另外两个通道编码颜色。
它具有以下属性。
- 感知上一致的颜色空间,近似于我们感知颜色的方式。
- 独立于设备(捕获或显示)。
- 在Adobe Photoshop中广泛使用。
- 与RGB颜色空间有关的是一个复变换方程。
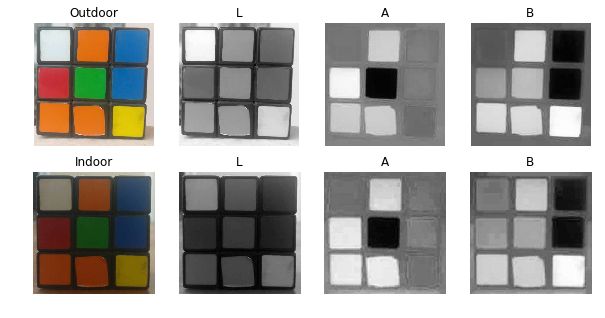
观测
- 从图中可以很清楚的看出,光照的变化对L分量的影响最大。
- 包含颜色信息的A和B分量没有发生大的变化。
- 室内的颜色信息与室外的颜色信息相似
(3)YCrCb彩色空间
YCrCb颜色空间是由RGB颜色空间派生而来的,它有以下三个组成部分。
- Y -经过伽玛校正后由RGB得到的亮度或亮度分量。
- Cr = R - Y(红色分量离Luma有多远)。
- Cb = B - Y(蓝色分量到Luma的距离)。
这个颜色空间具有以下属性。
- 将亮度和色度组件分离到不同的通道中。
- 主要用于电视传输压缩(Cr和Cb元件)。
- 设备相关
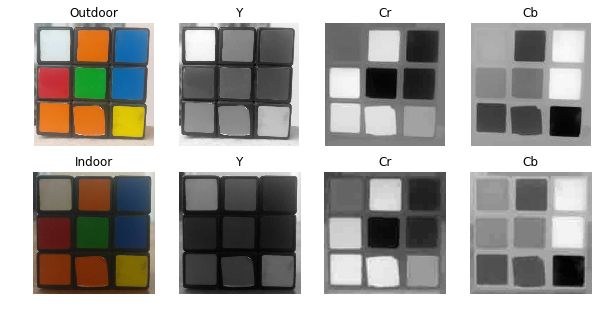
观测 - 亮度和颜色成分的光照变化,与LAB类似的观测结果。
- 与LAB相比,在室外图像中,红色和橙色的感知差异更小。
- 白色在所有三种成分中都发生了变化。
(4)HSV彩色空间
HSV颜色空间有以下三个组成部分:
- H -色相(主波长)。
- S -饱和度(纯度/颜色的深浅)。
- V -值(强度)。
让我们列举它的一些属性。
- 最好的是,它只使用一个通道来描述颜色(H),使它非常直观地指定颜色。
- 设备相关
观测
- 两幅图像的H分量非常相似,这表明即使在光照变化的情况下,颜色信息也是完整的。
- 在两幅图像中S分量也非常相似。
- V分量捕捉落在它上面的光量,因此它会随着照明的变化而变化。
- 室外图像和室内图像的红色块值有很大的差异。这是因为Hue被表示为一个圆,红色是在起始角度。因此,它可以取[300,360]和[0,60]之间的值。
2.如何使用这些颜色空间进行分割
(1)最简单地方式
现在我们已经对不同的颜色空间有了一些了解,让我们首先尝试使用它们来检测立方体中的绿色。
步骤1:获取特定颜色的颜色值
找出每个颜色空间的绿色值的近似范围。为此,使用一个交互式GUI,你可以通过将鼠标悬停在图像上来检查每个像素的所有颜色空间的值,如下所示:

交互式GUI代码如下:
(1)Python
interactiveColorDetect.py
import cv2,argparse,glob
import numpy as np
# 鼠标回调函数
def showPixelValue(event,x,y,flags,param):
global img, combinedResult, placeholder
if event == cv2.EVENT_MOUSEMOVE:
# 从鼠标在(x,y)中的位置获取像素值
bgr = img[y,x]
# 将BGR像素转换为其他颜色格式
ycb = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2YCrCb)[0][0]
lab = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2Lab)[0][0]
hsv = cv2.cvtColor(np.uint8([[bgr]]),cv2.COLOR_BGR2HSV)[0][0]
# 创建一个空占位符来显示值
placeholder = np.zeros((img.shape[0],400,3),dtype=np.uint8)
# 用颜色空间的值填充占位符
cv2.putText(placeholder, "BGR {}".format(bgr), (20, 70), cv2.FONT_HERSHEY_COMPLEX, .9, (255,255,255), 1, cv2.LINE_AA)
cv2.putText(placeholder, "HSV {}".format(hsv), (20, 140), cv2.FONT_HERSHEY_COMPLEX, .9, (255,255,255), 1, cv2.LINE_AA)
cv2.putText(placeholder, "YCrCb {}".format(ycb), (20, 210), cv2.FONT_HERSHEY_COMPLEX, .9, (255,255,255), 1, cv2.LINE_AA)
cv2.putText(placeholder, "LAB {}".format(lab), (20, 280), cv2.FONT_HERSHEY_COMPLEX, .9, (255,255,255), 1, cv2.LINE_AA)
# 将两个结果合并在一个图像中并排显示
combinedResult = np.hstack([img,placeholder])
cv2.imshow('PRESS P for Previous, N for Next Image',combinedResult)
if __name__ == '__main__' :
# 加载图像并设置鼠标回调函数
global img
files = glob.glob('images/rub*.jpg')
files.sort()
img = cv2.imread(files[0])
img = cv2.resize(img,(400,400))
cv2.imshow('PRESS P for Previous, N for Next Image',img)
# 创建一个空窗口
cv2.namedWindow('PRESS P for Previous, N for Next Image')
# 为鼠标上的任何事件创建一个回调函数
cv2.setMouseCallback('PRESS P for Previous, N for Next Image',showPixelValue)
i = 0
while(1):
k = cv2.waitKey(1) & 0xFF
# 检查文件夹中的下一个图像
if k == ord('n'):
i += 1
img = cv2.imread(files[i%len(files)])
img = cv2.resize(img,(400,400))
cv2.imshow('PRESS P for Previous, N for Next Image',img)
# 检查文件夹中的前一个图像
elif k == ord('p'):
i -= 1
img = cv2.imread(files[i%len(files)])
img = cv2.resize(img,(400,400))
cv2.imshow('PRESS P for Previous, N for Next Image',img)
elif k == 27:
cv2.destroyAllWindows()
break
(2) C++
interactiveColorDetect.cpp
#include "opencv2/opencv.hpp"
#include 步骤2:应用阈值进行分割
从图像中提取出与绿色像素值相近的所有像素。我们可以为每个颜色空间取一个+/- 40的范围,并检查结果看起来如何。我们将使用opencv函数inRange()来查找绿色像素的mask,然后使用bitwise_and()操作使用mask从图像中获取绿色像素。
interactiveColorSegment.py
(1)Python
import cv2,time,argparse,glob
import numpy as np
# 要跟踪的全局变量
show = False
def onTrackbarActivity(x):
global show
show = True
pass
if __name__ == '__main__' :
# 获取文件名
files = glob.glob('images/rub*.jpg')
files.sort()
# 加载图片
original = cv2.imread(files[0])
# 调整图像大小
rsize = 250
original = cv2.resize(original,(rsize,rsize))
# 屏幕上窗口开始的位置
initialX = 50
initialY = 50
# 创建显示图像的窗口
cv2.namedWindow('P-> Previous, N-> Next',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('SelectBGR',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('SelectHSV',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('SelectYCB',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('SelectLAB',cv2.WINDOW_AUTOSIZE)
# 移动窗口,将它们水平堆叠
cv2.moveWindow('P-> Previous, N-> Next',initialX,initialY)
cv2.moveWindow('SelectBGR',initialX + (rsize + 5),initialY)
cv2.moveWindow('SelectHSV',initialX + 2*(rsize + 5),initialY)
cv2.moveWindow('SelectYCB',initialX + 3*(rsize + 5),initialY)
cv2.moveWindow('SelectLAB',initialX + 4*(rsize + 5),initialY)
#创建跟踪条以获取YCrCb的值
cv2.createTrackbar('CrMin','SelectYCB',0,255,onTrackbarActivity)
cv2.createTrackbar('CrMax','SelectYCB',0,255,onTrackbarActivity)
cv2.createTrackbar('CbMin','SelectYCB',0,255,onTrackbarActivity)
cv2.createTrackbar('CbMax','SelectYCB',0,255,onTrackbarActivity)
cv2.createTrackbar('YMin','SelectYCB',0,255,onTrackbarActivity)
cv2.createTrackbar('YMax','SelectYCB',0,255,onTrackbarActivity)
#创建跟踪条来获取HSV的值
cv2.createTrackbar('HMin','SelectHSV',0,180,onTrackbarActivity)
cv2.createTrackbar('HMax','SelectHSV',0,180,onTrackbarActivity)
cv2.createTrackbar('SMin','SelectHSV',0,255,onTrackbarActivity)
cv2.createTrackbar('SMax','SelectHSV',0,255,onTrackbarActivity)
cv2.createTrackbar('VMin','SelectHSV',0,255,onTrackbarActivity)
cv2.createTrackbar('VMax','SelectHSV',0,255,onTrackbarActivity)
#创建跟踪条来获取BGR的值
cv2.createTrackbar('BGRBMin','SelectBGR',0,255,onTrackbarActivity)
cv2.createTrackbar('BGRBMax','SelectBGR',0,255,onTrackbarActivity)
cv2.createTrackbar('BGRGMin','SelectBGR',0,255,onTrackbarActivity)
cv2.createTrackbar('BGRGMax','SelectBGR',0,255,onTrackbarActivity)
cv2.createTrackbar('BGRRMin','SelectBGR',0,255,onTrackbarActivity)
cv2.createTrackbar('BGRRMax','SelectBGR',0,255,onTrackbarActivity)
#创建跟踪条来获取LAB的值
cv2.createTrackbar('LABLMin','SelectLAB',0,255,onTrackbarActivity)
cv2.createTrackbar('LABLMax','SelectLAB',0,255,onTrackbarActivity)
cv2.createTrackbar('LABAMin','SelectLAB',0,255,onTrackbarActivity)
cv2.createTrackbar('LABAMax','SelectLAB',0,255,onTrackbarActivity)
cv2.createTrackbar('LABBMin','SelectLAB',0,255,onTrackbarActivity)
cv2.createTrackbar('LABBMax','SelectLAB',0,255,onTrackbarActivity)
# 初始显示所有图像
cv2.imshow('SelectHSV',original)
cv2.imshow('SelectYCB',original)
cv2.imshow('SelectLAB',original)
cv2.imshow('SelectBGR',original)
i = 0
while(1):
cv2.imshow('P-> Previous, N-> Next',original)
k = cv2.waitKey(1) & 0xFF
# 检查文件夹中的下一个图像
if k == ord('n'):
i += 1
original = cv2.imread(files[i%len(files)])
original = cv2.resize(original,(rsize,rsize))
show = True
# 检查文件夹中的先前图像
elif k == ord('p'):
i -= 1
original = cv2.imread(files[i%len(files)])
original = cv2.resize(original,(rsize,rsize))
show = True
# 按下esc键后关闭所有窗口
elif k == 27:
break
if show: # 如果在轨迹栏上有任何事件
show = False
# 从BGR跟踪器获取值
BMin = cv2.getTrackbarPos('BGRBMin','SelectBGR')
GMin = cv2.getTrackbarPos('BGRGMin','SelectBGR')
RMin = cv2.getTrackbarPos('BGRRMin','SelectBGR')
BMax = cv2.getTrackbarPos('BGRBMax','SelectBGR')
GMax = cv2.getTrackbarPos('BGRGMax','SelectBGR')
RMax = cv2.getTrackbarPos('BGRRMax','SelectBGR')
minBGR = np.array([BMin, GMin, RMin])
maxBGR = np.array([BMax, GMax, RMax])
# 从HSV跟踪器获取值
HMin = cv2.getTrackbarPos('HMin','SelectHSV')
SMin = cv2.getTrackbarPos('SMin','SelectHSV')
VMin = cv2.getTrackbarPos('VMin','SelectHSV')
HMax = cv2.getTrackbarPos('HMax','SelectHSV')
SMax = cv2.getTrackbarPos('SMax','SelectHSV')
VMax = cv2.getTrackbarPos('VMax','SelectHSV')
minHSV = np.array([HMin, SMin, VMin])
maxHSV = np.array([HMax, SMax, VMax])
# 从LAB跟踪器获取值
LMin = cv2.getTrackbarPos('LABLMin','SelectLAB')
AMin = cv2.getTrackbarPos('LABAMin','SelectLAB')
BMin = cv2.getTrackbarPos('LABBMin','SelectLAB')
LMax = cv2.getTrackbarPos('LABLMax','SelectLAB')
AMax = cv2.getTrackbarPos('LABAMax','SelectLAB')
BMax = cv2.getTrackbarPos('LABBMax','SelectLAB')
minLAB = np.array([LMin, AMin, BMin])
maxLAB = np.array([LMax, AMax, BMax])
# 从YCrCb跟踪器获取值
YMin = cv2.getTrackbarPos('YMin','SelectYCB')
CrMin = cv2.getTrackbarPos('CrMin','SelectYCB')
CbMin = cv2.getTrackbarPos('CbMin','SelectYCB')
YMax = cv2.getTrackbarPos('YMax','SelectYCB')
CrMax = cv2.getTrackbarPos('CrMax','SelectYCB')
CbMax = cv2.getTrackbarPos('CbMax','SelectYCB')
minYCB = np.array([YMin, CrMin, CbMin])
maxYCB = np.array([YMax, CrMax, CbMax])
# 将BGR图像转换为其他颜色空间
imageBGR = np.copy(original)
imageHSV = cv2.cvtColor(original,cv2.COLOR_BGR2HSV)
imageYCB = cv2.cvtColor(original,cv2.COLOR_BGR2YCrCb)
imageLAB = cv2.cvtColor(original,cv2.COLOR_BGR2LAB)
# 使用从轨迹栏获得的最小值和最大值创建掩码,并应用bitewise_and操作来获得结果
maskBGR = cv2.inRange(imageBGR,minBGR,maxBGR)
resultBGR = cv2.bitwise_and(original, original, mask = maskBGR)
maskHSV = cv2.inRange(imageHSV,minHSV,maxHSV)
resultHSV = cv2.bitwise_and(original, original, mask = maskHSV)
maskYCB = cv2.inRange(imageYCB,minYCB,maxYCB)
resultYCB = cv2.bitwise_and(original, original, mask = maskYCB)
maskLAB = cv2.inRange(imageLAB,minLAB,maxLAB)
resultLAB = cv2.bitwise_and(original, original, mask = maskLAB)
# 显示结果
cv2.imshow('SelectBGR',resultBGR)
cv2.imshow('SelectYCB',resultYCB)
cv2.imshow('SelectLAB',resultLAB)
cv2.imshow('SelectHSV',resultHSV)
cv2.destroyAllWindows()
(2) C++
interactiveColorSegment.cpp
#include "opencv2/opencv.hpp"
#include 
(2)为更好的解决方案进行一些数据分析
第一步:数据收集
我收集了立方体在不同光照条件下的10张图像,分别裁剪每一种颜色,得到6个不同颜色的数据集。你可以从视觉上看到颜色发生了多大的变化。
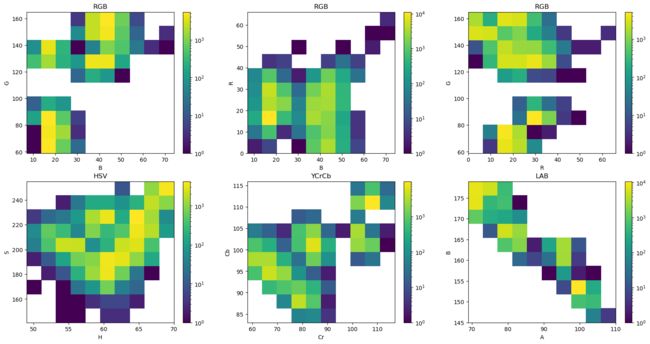
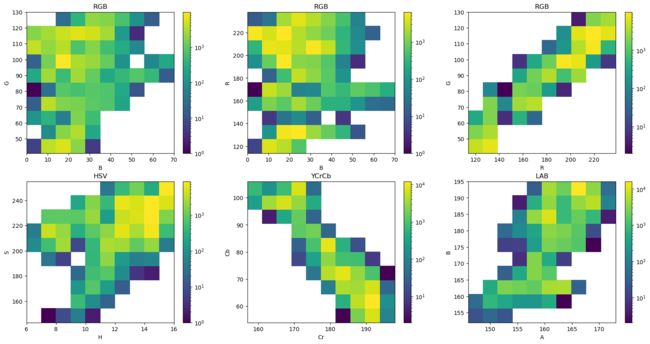
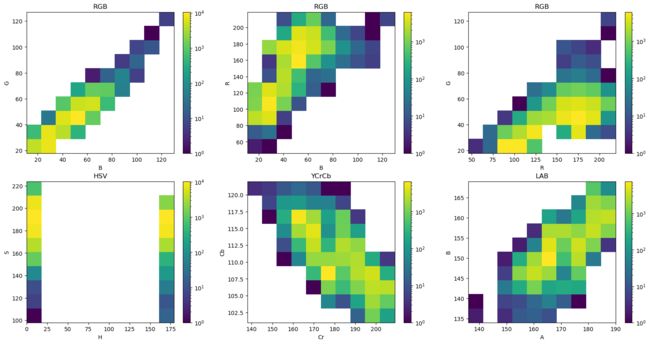
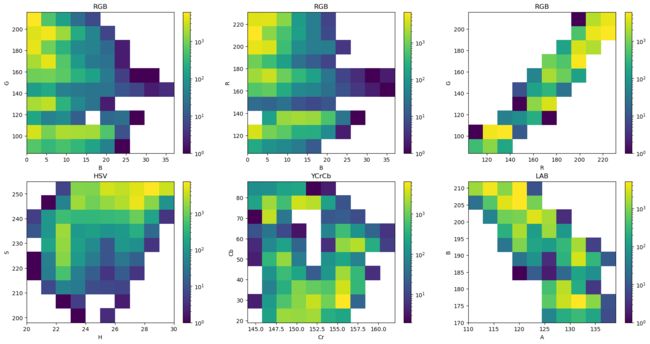
步骤2:计算密度图
检查特定颜色的分布,比如蓝色或黄色在不同颜色空间中的分布。密度图或2D直方图给出了关于给定颜色值变化的想法。例如,理想情况下,蓝色图像的蓝色通道的值应该始终为255。但实际上,它分布在0到255之间。
# 导入所需的包
import matplotlib.pyplot as plt
from matplotlib.colors import LogNorm
import cv2, glob
import numpy as np
# 指定要绘制的直方图的颜色
color = 'pieces/yellow'
#图是否应该是完整的还是缩小的
zoom = 1
# 加载文件夹中的所有文件
files = glob.glob(color + '*.jpg')
files.sort()
# 空数组用于分离的通道
B = np.array([])
G = np.array([])
R = np.array([])
H = np.array([])
S = np.array([])
V = np.array([])
Y = np.array([])
Cr = np.array([])
Cb = np.array([])
LL = np.array([])
LA = np.array([])
LB = np.array([])
# 数据创建
# 将每个文件中的值附加到各自的通道中
for fi in files[:]:
# BGR
im = cv2.imread(fi)
b = im[:, :, 0]
b = b.reshape(b.shape[0] * b.shape[1])
g = im[:, :, 1]
g = g.reshape(g.shape[0] * g.shape[1])
r = im[:, :, 2]
r = r.reshape(r.shape[0] * r.shape[1])
B = np.append(B, b)
G = np.append(G, g)
R = np.append(R, r)
# HSV
hsv = cv2.cvtColor(im, cv2.COLOR_BGR2HSV)
h = hsv[:, :, 0]
h = h.reshape(h.shape[0] * h.shape[1])
s = hsv[:, :, 1]
s = s.reshape(s.shape[0] * s.shape[1])
v = hsv[:, :, 2]
v = v.reshape(v.shape[0] * v.shape[1])
H = np.append(H, h)
S = np.append(S, s)
V = np.append(V, v)
# YCrCb
ycb = cv2.cvtColor(im, cv2.COLOR_BGR2YCrCb)
y = ycb[:, :, 0]
y = y.reshape(y.shape[0] * y.shape[1])
cr = ycb[:, :, 1]
cr = cr.reshape(cr.shape[0] * cr.shape[1])
cb = ycb[:, :, 2]
cb = cb.reshape(cb.shape[0] * cb.shape[1])
Y = np.append(Y, y)
Cr = np.append(Cr, cr)
Cb = np.append(Cb, cb)
# Lab
lab = cv2.cvtColor(im, cv2.COLOR_BGR2LAB)
ll = lab[:, :, 0]
ll = ll.reshape(ll.shape[0] * ll.shape[1])
la = lab[:, :, 1]
la = la.reshape(la.shape[0] * la.shape[1])
lb = lab[:, :, 2]
lb = lb.reshape(lb.shape[0] * lb.shape[1])
LL = np.append(LL, ll)
LA = np.append(LA, la)
LB = np.append(LB, lb)
# 绘制柱状图
nbins = 10
plt.figure(figsize=[20, 10])
plt.subplot(2, 3, 1)
plt.hist2d(B, G, bins=nbins, norm=LogNorm())
plt.xlabel('B')
plt.ylabel('G')
plt.title('RGB')
if not zoom:
plt.xlim([0, 255])
plt.ylim([0, 255])
plt.colorbar()
plt.subplot(2, 3, 2)
plt.hist2d(B, R, bins=nbins, norm=LogNorm())
plt.colorbar()
plt.xlabel('B')
plt.ylabel('R')
plt.title('RGB')
if not zoom:
plt.xlim([0, 255])
plt.ylim([0, 255])
plt.subplot(2, 3, 3)
plt.hist2d(R, G, bins=nbins, norm=LogNorm())
plt.colorbar()
plt.xlabel('R')
plt.ylabel('G')
plt.title('RGB')
if not zoom:
plt.xlim([0, 255])
plt.ylim([0, 255])
plt.subplot(2, 3, 4)
plt.hist2d(H, S, bins=nbins, norm=LogNorm())
plt.colorbar()
plt.xlabel('H')
plt.ylabel('S')
plt.title('HSV')
if not zoom:
plt.xlim([0, 180])
plt.ylim([0, 255])
plt.subplot(2, 3, 5)
plt.hist2d(Cr, Cb, bins=nbins, norm=LogNorm())
plt.colorbar()
plt.xlabel('Cr')
plt.ylabel('Cb')
plt.title('YCrCb')
if not zoom:
plt.xlim([0, 255])
plt.ylim([0, 255])
plt.subplot(2, 3, 6)
plt.hist2d(LA, LB, bins=nbins, norm=LogNorm())
plt.colorbar()
plt.xlabel('A')
plt.ylabel('B')
plt.title('LAB')
if not zoom:
plt.xlim([0, 255])
plt.ylim([0, 255])
plt.savefig(color + '.png', bbox_inches='tight')
else:
plt.savefig(color + '-zoom.png', bbox_inches='tight')
plt.show()
当分析blue图片时候:

当分析green图片时候:
当分析orange图片时候:
当分析red图片时候:
当分析yellow图片时候:
(3)结论
当光照变化很大时,我们可以看到:
- 理想情况下,我们希望使用颜色通道最紧凑/最集中的密度图的颜色空间。
- RGB的密度图急剧膨胀。这意味着通道值的变化非常大,固定一个阈值是一个大问题。固定较高的范围将检测到与所需颜色相似的颜色(假阳性)和较低的范围将不会检测到不同照明下所需的颜色(假阴性)。
- 在HSV中,由于只有H分量包含关于绝对颜色的信息。因此,它成为我的颜色空间的第一选择,因为我可以调整一个旋钮(H)来指定颜色,而不是YCrCb (Cr和Cb)和LAB (A和B)中的两个旋钮。
- 比较YCrCb和LAB的图,发现在LAB的情况下,紧凑程度更高。所以,我的下一个最佳选择是LAB颜色空间。
(4)最终的效果
在最后一节中,我将展示检测蓝色和黄色块的结果,方法是从密度图中提取阈值,并将其应用到各自的颜色空间中,方法与第二节相同。当我们在HSV, YCrCb和LAB颜色空间中工作时,我们不必担心强度分量。我们只需要为颜色分量指定阈值。图中显示了我用来生成结果的值。

在上面的结果中,我直接从密度图中取了值。我们也可以选择取密度图中最密集区域的值,这样可以更严格的控制颜色范围。这将留下一些洞和散乱的像素,可以用侵蚀和膨胀,然后过滤。
3.颜色空间的其他有用应用
- 直方图均衡化通常是在灰度图像上进行的。但是,您可以通过将RGB图像转换为YCbCr并仅对Y通道进行直方图均衡化来执行彩色图像的均衡化。
- 两张图像之间通过将图像转换到Lab彩色空间实现彩色变换
- 许多智能手机的相机应用程序(如谷歌相机或Instagram)的滤镜都利用这些颜色空间转换来创建很酷的效果!
参考目录
https://learnopencv.com/color-spaces-in-opencv-cpp-python/