物联网课设1-基于ZigBee智能照明系统
前言:
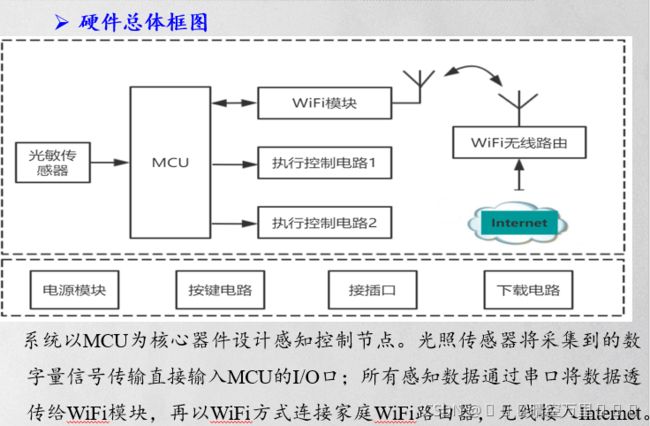
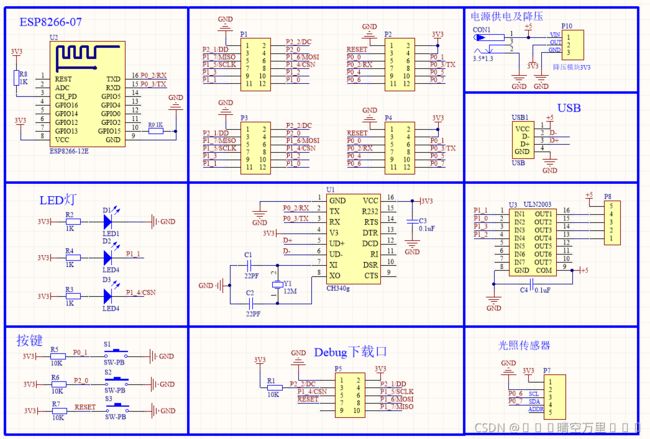
大四上学期的一门课程设计,主要用到CC2530单片机、WiFi模块:ESP826607、光照强度传感器:BH1750、步进电机等…
现分享给大家,希望对大家有所帮助。
实现功能:
数据采集:
- 采集光照强度的数据到ONENET云平台
- 采集终端设备的工作状态
本地控制:
- 控制照明设备的开关
- 控制照明设备是否进入自动模式
- 控制照明设备是否进入手动模式
自动控制:
- 根据当前的光照强度和设定的光照阈值自动控制照明设备的亮灭
- 自动调节照明设备的亮度
远程控制:
- 远程控制照明设备的亮灭
- 远程调节照明设备的亮度
- 远程控制窗帘的开关
- 远程控制照明设备的自动模式
- 远程设定光照阈值
原理图:
PCB图:

3D模型图:

实物图:

手机应用界面:

自动控制代码:
if(flag1==0&&flag2==1) //本地控制未开启且自动控制开启
{
if(end_temp < LIGHT ) //当光照数值小于设定阈值时开灯
{
P1_4 = 0; //D3灯亮
}
else
{
P1_4 = 1; //D3灯灭
}
}
if(flag1==0&&Remote_self_dimming==1) //本地控制未开启且远程自调光控制开启
{
pwmConfig(100-light2); //自动调光,参数取值0~100
}
else
pwmConfig(Remote_dimming_control); //远程调光参数取值0~100
}
本地控制代码:
extern unsigned char flag = 0; //用于记录光照设备开启/关闭状态
extern unsigned char flag1 = 0; //用于标记是否处于手动控制
void SampleApp_HandleKeys( uint8 shift, uint8 keys )
{
(void)shift;
if ( keys & HAL_KEY_SW_6 ) //按下S1进入/退出手动控制模式
{
if(flag1 == 0)
{
flag1 = 1;
}
else
{
flag1 = 0;
}
}
if ( keys & HAL_KEY_SW_1 ) //在手动模式下按下S2控制D3
{
if(flag == 0)
{
flag = 1;
HalLedSet( HAL_LED_3, HAL_LED_MODE_OFF);
}
else
{
flag = 0;
HalLedSet( HAL_LED_3, HAL_LED_MODE_ON);//D3亮代表开启空调
}
}
}
远程控制代码:
void Ctrl(uint8* cmd) //远程控制函数
{
//LED控制
if(strstr((char *)cmd, "D31")) //搜索"D31"
{
P1_4 = 0; //D3亮
}
else if(strstr((char *)cmd, "D30")) //搜索"D30"
{
P1_4 = 1; //D3灭
}
//如果命令是flag21,代表开启自动控制
else if(strstr((char *)cmd, "flag21")) //搜索"flag21"
{
flag2 = 1;
}
else if(strstr((char *)cmd, "flag20")) //搜索"flag20"
{
flag2 = 0;
}
//如果命令是Remote_self_dimming1,代表开启自动调光
else if(strstr((char *)cmd, "Remote_self_dimming1")) //搜索"Remote_self_dimming1"
{
Remote_self_dimming = 1;
}
else if(strstr((char *)cmd, "Remote_self_dimming0")) //搜索"Remote_self_dimming0"
{
Remote_self_dimming = 0;
}
else if(cmd[0]== 'L') //设置光照阈值命令
{
if(osal_strlen(cmd)==6) //5位数
LIGHT = (cmd[1]-0X30)*10000+(cmd[2]-0X30)*1000+(cmd[3]-0X30)*100+(cmd[4]-0X30)*10+(cmd[5]-0X30)*1;
else if(osal_strlen(cmd)==5) //4位数
LIGHT = (cmd[1]-0X30)*1000+(cmd[2]-0X30)*100+(cmd[3]-0X30)*10+(cmd[4]-0X30)*1;
else if(osal_strlen(cmd)==4) //3位数
LIGHT = (cmd[1]-0X30)*100+(cmd[2]-0X30)*10+(cmd[3]-0X30)*1;
else if(osal_strlen(cmd)==3) //2位数
LIGHT = (cmd[1]-0X30)*10+(cmd[2]-0X30)*1;
else if(osal_strlen(cmd)==2) //1位数
LIGHT = (cmd[1]-0X30)*1;
}
else if(cmd[0]== 'A') //设置远程调光命令
{
if(osal_strlen(cmd)==4) //3位数
Remote_dimming_control = (cmd[1]-0X30)*100+(cmd[2]-0X30)*10+(cmd[3]-0X30)*1;
else if(osal_strlen(cmd)==3) //2位数
Remote_dimming_control = (cmd[1]-0X30)*10+(cmd[2]-0X30)*1;
else if(osal_strlen(cmd)==2) //1位数
Remote_dimming_control = (cmd[1]-0X30)*1;
}
else if(cmd[0]== 'M') //设置电机命令
{
if(cmd[1]== '0')
{
uint8 on=0; //停止 //无线发送到终端
AF_DataRequest( &SampleApp_Periodic_DstAddr, &SampleApp_epDesc,
SAMPLEAPP_PERIODIC_CLUSTERID,
1,
&on,
&SampleApp_MsgID,
AF_DISCV_ROUTE,
AF_DEFAULT_RADIUS );
}
else if(cmd[1]== 'F')
{
uint8 buff[3];
buff[0]=cmd[1];
buff[1]=cmd[2];
buff[2]=cmd[4];
AF_DataRequest( &SampleApp_Periodic_DstAddr, &SampleApp_epDesc,
SAMPLEAPP_PERIODIC_CLUSTERID,
4,
buff,
&SampleApp_MsgID,
AF_DISCV_ROUTE,
AF_DEFAULT_RADIUS );
}
else if(cmd[1]== 'P') //数据格式MP1.5
{
uint8 buff[3];
buff[0]=cmd[1];
buff[1]=cmd[2];
buff[2]=cmd[4];
AF_DataRequest( &SampleApp_Periodic_DstAddr, &SampleApp_epDesc,
SAMPLEAPP_PERIODIC_CLUSTERID,
4,
buff,
&SampleApp_MsgID,
AF_DISCV_ROUTE,
AF_DEFAULT_RADIUS );
}
}
}
终端发送数据到协调器代码:
void SampleApp_Send_P2P_Message( void ) //终端发送数据到协调器
{
byte str[6]={
0};
byte str1[5]={
0};
int len=0;
unsigned short light=0;
light=get_light(); //读取光照值
wan = light/10000+0x30;
qian = (light/1000)%10+0x30;
bai = (light/100)%10+0x30;
shi = (light/10)%10+0x30;
ge = light %10+0x30;
str[4]=wan;
str[3]=qian;
str[2]=bai;
str[1]=shi;
str[0]=ge;
str[5]=mflag+0x30;
sprintf(str1, "%d", light);
len=osal_strlen(str1);
HalUARTWrite(0, "light: ",7); //串口输出
HalUARTWrite(0, str1,len ); //串口输出
HalUARTWrite(0, "\r\n",2);
//无线发送到协调器
AF_DataRequest( &SampleApp_P2P_DstAddr, &SampleApp_epDesc,
SAMPLEAPP_P2P_CLUSTERID,
6,
str,
&SampleApp_MsgID,
AF_DISCV_ROUTE,
AF_DEFAULT_RADIUS );
}
应用层部分代码:
关于ZigBee协议栈的代码太多,故只能放一部分。
/*********************************************************************
* INCLUDES
*/
#include