Ubuntu20.04及18.04的ROS安装教程及各种失败解决方法(sudo rosdep init找不到命令或失败与rosdep update一直timeout,roscore找不到命令)
项目场景:ros安装
在安装ROS的过程中一般选择有VPN或者网络非常好的网络进行安装,这样就可以全程顺利执行一次性安装成功,但没有VPN也没事这个教程将会给出解决由外网网络原因造成安装失败的解决方法
安装步骤:Ctrl+Alt+T打开终端
1.添加 软件源sources.list(设置你的电脑可从packages.ros.org 接收软件.)
终端输入
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.添加 密钥
终端输入
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654添加成功

3.从软件源更新一下软件包
终端输入
sudo apt update包含ROS的软件包更新成功
4.安装ROS桌面完整版 : 包含ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及2D/3D感知等(注意:以20.04安装版本: noetic为例,由于每个Ubuntu版本需安装对应的ROS版本18.04应安装版本:melodic(18.04将下面代码中noetic改为melodic即可))
终端输入
sudo apt install ros-noetic-desktop-full桌面完整版安装成功
5.初始化rosdep
终端输入
sudo rosdep init
失败1.如出现sudo: rosdep:找不到命令
![]()
解决办法
20.04终端输入
sudo apt install python3-rosdep218.04终端输入
sudo apt install python-rosdep2然后再次初始化rosdep
sudo rosdep init失败2.ERROR: default sources list file already exists,20-default.list已存在
解决办法
终端输入
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
再次sudo rosdep init
失败3.出现Website may be down.原因是https://raw.githubusercontent.com/是外网网址访问不稳定(可多尝试几次sudo rosdep init)

如果多次尝试还是不行可尝试下边方法
解决办法
sudo gedit /etc/hosts
在文件末尾添加下面这段:
151.101.84.133 raw.githubusercontent.com然后保存退出再次sudo rosdep init如果还是不行登陆IPAdress网站The Best IP Address, Email and Networking Tools - IPAddress.com,输入raw.githubusercontent.com查询到真实IP地址:

将查询到的IP替换上面代码的 151.101.84.133然后再次sudo rosdep init一般就会成功了
初始化rosdep成功

失败4.无论用什么方法都无法sudo rosdep init,只能祭出终极大招(自己创建20-default.list文件)
终端依次输入
cd /etc/ros/rosdep/sources.list.d
sudo touch 20-default.list然后打开20-default.list添加内容
终端输入
sudo gedit 20-default.list
打开sudo gedit 20-default.list 后将下面内容添加到20-default.list 中然后Ctrl+S 保存退出进入第六步
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead6.更新rosdep
终端输入
rosdep update
失败1.The read operation timed out(包括ERROR: unable to process source,ERROR: error loading sources list:
) 原因都是外网网址访问不稳定(可多尝试几次rosdep update
)

多次尝试依然报错可尝试下面的解决方法
解决办法
1.把相关文件下载到本地:(注意:下面代码中nice换为你的用户名)
git clone https://github.com/ros/rosdistro.git /home/nice/robot如网络不好无法Git下载可以在下面我分享的百度网盘链接下载压缩包然后解压提取到主目录下
链接:https://pan.baidu.com/s/1ZjMcvqOvLRa_iTdXis8ufg
提取码:01e22.改去rosdep update获取文件的网址换为本地地址:
终端输入(注意:下面代码以Ubuntu20.04为例,18.04将下面代码中python3改为python2.7即可)
sudo gedit /usr/lib/python3/dist-packages/rosdep2/rep3.py
输入后回车会弹出rep3.py文件将原来文件中的 REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml' 替换成 REP3_TARGETS_URL = 'file:///home/nice/robot/releases/targets.yaml'(此处nice改为你的用户名因为此处的具体地址为你下载到本地的文件的地址。)
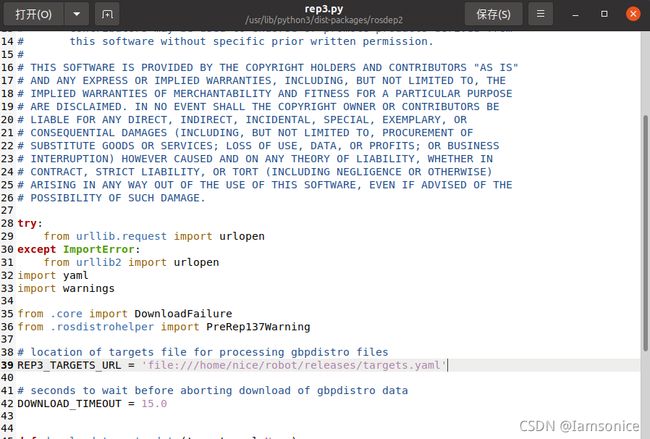
Ctrl+S保存并退出
终端输入(注意:下面代码以Ubuntu20.04为例,18.04将下面代码中python3改为python2.7即可)
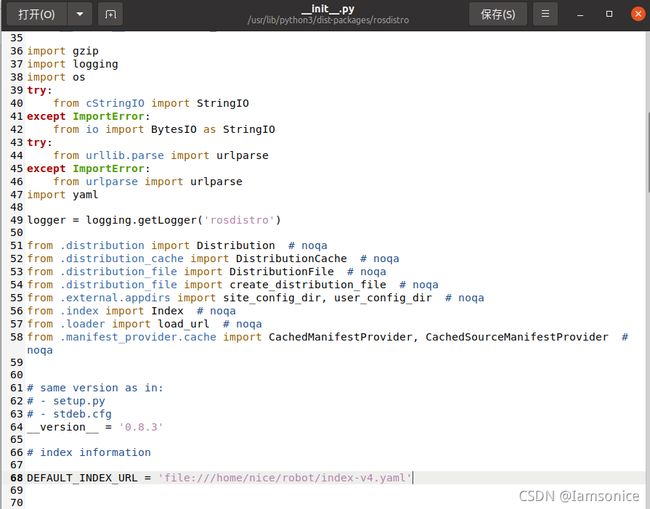
sudo gedit /usr/lib/python3/dist-packages/rosdistro/__init__.py
输入回车后会弹出__init__.py文件将原来文件中的 DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'替换成 DEFAULT_INDEX_URL = 'file:///home/nice/robot/index-v4.yaml'(此处nice改为你的用户名因为此处的具体地址为你下载到本地的文件的地址。)
 3.修改/etc/ros/rosdep/sources.list.d/20-default.list中的网址为本地地址
3.修改/etc/ros/rosdep/sources.list.d/20-default.list中的网址为本地地址
终端输入
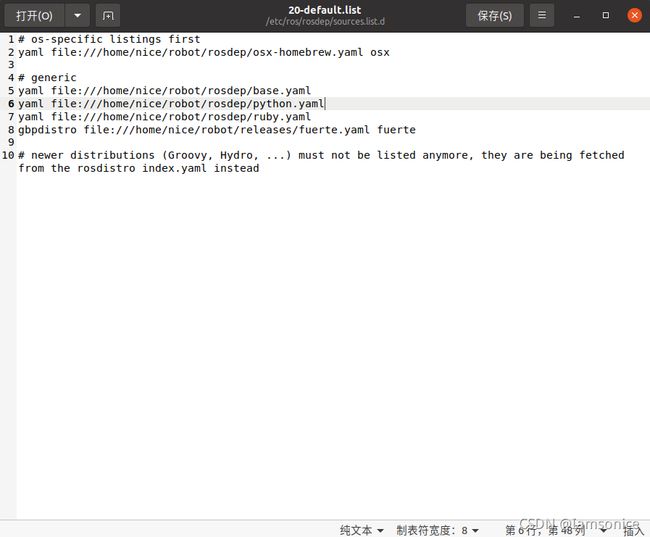
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list
输入回车后会弹出20-default.list文件将原来文件中的所有 raw.githubusercontent.com开头的网址替换成对应文件在本地的路径(可将下面代码更换20-default.list中的代码注意:代码中的nice全部更换为你的用户名)
# os-specific listings first
yaml file:///home/nice/robot/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/nice/robot/rosdep/base.yaml
yaml file:///home/nice/robot/rosdep/python.yaml
yaml file:///home/nice/robot/rosdep/ruby.yaml
gbpdistro file:///home/nice/robot/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead修改为如下图后保存退出(注意:代码中的nice全部更换为你的用户名)
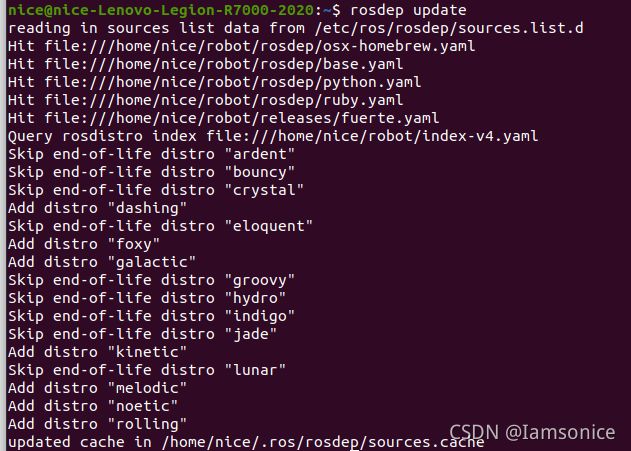
然后再次rosdep update一般99%几率成功,如果不成功可评论或私信我
rosdep update成功
6.配置环境变量
终端输入(下面代码以20.04为例18.04将下面代码中noetic改为melodic即可)
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc然后终端输入
source ~/.bashrc7.安装rosinstall
20.04终端输入
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
18.04终端输入
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential至此ROS安装完毕
8.运行一下roscore验证一下ROS是否安装成功
Ctrl+Alt+T新建一个终端输入
roscore出现错误Command 'roscore' not found,

解决方法 :重新安装ROS桌面完整版即可
20.04终端输入
sudo apt install ros-noetic-desktop-full18.04终端输入
sudo apt install ros-melodic-desktop-fullroscore运行成功界面