opencv3.4.10 算法测试
原图
双边滤波器 (bilateralFilter)
高斯低通滤波计算邻域中像素值的加权平均值,其中权重随着距邻域中心的距离而减小。虽然可以给出这种权重下降的正式和定量解释,但直觉是图像通常在空间上变化缓慢,因此附近的像素可能具有相似的值,因此将它们平均在一起是合适的。破坏这些附近像素的噪声值相互之间的相关性低于信号值,缓慢空间变化的假设在边缘失败,因此被线性低通滤波模糊。我们如何防止跨边缘求平均,同时仍然在平滑区域内求平均? 许多努力致力于减少这种不希望的影响。双边滤波是一种简单的、非迭代的边缘保留平滑方案。
void cv::bilateralFilter(InputArray src, OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType = BORDER_DEFAULT)
Sigma 值:为简单起见,您可以将 2 个 Sigma 值设置为相同。如果它们很小(< 10),过滤器不会产生太大的效果
,而如果它们很大(> 150),它们将产生非常强烈的效果,使图像看起来“卡通化”。过滤器大小:大过滤器
(d > 5)非常慢,因此建议使用 d=5 用于实时应用程序,对于需要大量噪声过滤的离线应用程序,可能使用 d=9。
测试(完整代码在最后)

boxFilter
使用一个核来平滑图像
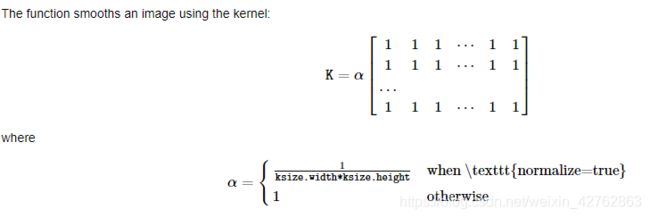
void cv::boxFilter(InputArray src, OutputArray dst, int ddepth, Size ksize, Point anchor = Point(-1,-1), bool normalize = true, int borderType = BORDER_DEFAULT)
测试

buildPyramid
为图像构建高斯金字塔。
void cv::buildPyramid(InputArray src, OutputArrayOfArrays dst, int maxlevel, int borderType = BORDER_DEFAULT)
dts参数放一个数组就好 maxlevel控制层数,2就是3张,原图一张,下采样两张。
测试



代码
#include