使用决策树预测隐形眼镜类型
目录
-
- **根据用户采集的WiFi信息采用决策树预测用户所在房间**
- **数据集**:
- **代码实现:**
-
- **a)** **基本参数:**
- **b)** **加载数据:**
根据用户采集的WiFi信息采用决策树预测用户所在房间
数据集:
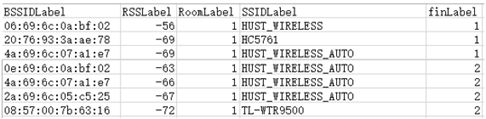
数据集:训练集存于TrainDT.csv中;测试集存于 TestDT.csv中。
BSSIDLabel: BSSID标识符,每个AP(接入点,如路由器)拥有1个或多个不同的BSSID,但1个BSSID只属于1个AP;
RSSLabel:该BSSID的信号强度,单位dbm;
RoomLabel: 该BSSID被采集时所属的房间号,为类标签,测试集中也含该标签,主要用于计算预测准确度;
SSIDLabel: 该BSSID的名称,不唯一;
finLabel:finLabel标号相同,表示这部分BSSID在同一时刻被采集到;我们将在同一时刻采集的所有BSSID及其相应RSS构成的矢量称为一个指纹;由于BSSID的RSS在不同位置大小不同,因此指纹可以唯一的标识一个位置。
代码实现:
使用sklearn****分类决策树完成。
a) 基本参数:
'''
分类决策树
'''
DecisionTreeClassifier(criterion="gini",
splitter="best",
max_depth=None,
min_samples_split=2,
min_samples_leaf=1,
min_weight_fraction_leaf=0.,
max_features=None,
random_state=None,
max_leaf_nodes=None,
min_impurity_decrease=0.,
min_impurity_split=None,
class_weight=None,
presort=False)
'''
参数含义:
1.criterion:string, optional (default="gini")
(1).criterion='gini',分裂节点时评价准则是Gini指数。
(2).criterion='entropy',分裂节点时的评价指标是信息增益。
2.max_depth:int or None, optional (default=None)。指定树的最大深度。
如果为None,表示树的深度不限。直到所有的叶子节点都是纯净的,即叶子节点
中所有的样本点都属于同一个类别。或者每个叶子节点包含的样本数小于min_samples_split。
3.splitter:string, optional (default="best")。指定分裂节点时的策略。
(1).splitter='best',表示选择最优的分裂策略。
(2).splitter='random',表示选择最好的随机切分策略。
4.min_samples_split:int, float, optional (default=2)。表示分裂一个内部节点需要的做少样本数。
(1).如果为整数,则min_samples_split就是最少样本数。
(2).如果为浮点数(0到1之间),则每次分裂最少样本数为ceil(min_samples_split * n_samples)
5.min_samples_leaf: int, float, optional (default=1)。指定每个叶子节点需要的最少样本数。
(1).如果为整数,则min_samples_split就是最少样本数。
(2).如果为浮点数(0到1之间),则每个叶子节点最少样本数为ceil(min_samples_leaf * n_samples)
6.min_weight_fraction_leaf:float, optional (default=0.)
指定叶子节点中样本的最小权重。
7.max_features:int, float, string or None, optional (default=None).
搜寻最佳划分的时候考虑的特征数量。
(1).如果为整数,每次分裂只考虑max_features个特征。
(2).如果为浮点数(0到1之间),每次切分只考虑int(max_features * n_features)个特征。
(3).如果为'auto'或者'sqrt',则每次切分只考虑sqrt(n_features)个特征
(4).如果为'log2',则每次切分只考虑log2(n_features)个特征。
(5).如果为None,则每次切分考虑n_features个特征。
(6).如果已经考虑了max_features个特征,但还是没有找到一个有效的切分,那么还会继续寻找
下一个特征,直到找到一个有效的切分为止。
8.random_state:int, RandomState instance or None, optional (default=None)
(1).如果为整数,则它指定了随机数生成器的种子。
(2).如果为RandomState实例,则指定了随机数生成器。
(3).如果为None,则使用默认的随机数生成器。
9.max_leaf_nodes: int or None, optional (default=None)。指定了叶子节点的最大数量。
(1).如果为None,叶子节点数量不限。
(2).如果为整数,则max_depth被忽略。
10.min_impurity_decrease:float, optional (default=0.)
如果节点的分裂导致不纯度的减少(分裂后样本比分裂前更加纯净)大于或等于min_impurity_decrease,则分裂该节点。
加权不纯度的减少量计算公式为:
min_impurity_decrease=N_t / N * (impurity - N_t_R / N_t * right_impurity
\- N_t_L / N_t * left_impurity)
其中N是样本的总数,N_t是当前节点的样本数,N_t_L是分裂后左子节点的样本数,
N_t_R是分裂后右子节点的样本数。impurity指当前节点的基尼指数,right_impurity指
分裂后右子节点的基尼指数。left_impurity指分裂后左子节点的基尼指数。
11.min_impurity_split:float
树生长过程中早停止的阈值。如果当前节点的不纯度高于阈值,节点将分裂,否则它是叶子节点。
这个参数已经被弃用。用min_impurity_decrease代替了min_impurity_split。
12.class_weight:dict, list of dicts, "balanced" or None, default=None
类别权重的形式为{class_label: weight}
(1).如果没有给出每个类别的权重,则每个类别的权重都为1。
(2).如果class_weight='balanced',则分类的权重与样本中每个类别出现的频率成反比。
计算公式为:n_samples / (n_classes * np.bincount(y))
(3).如果sample_weight提供了样本权重(由fit方法提供),则这些权重都会乘以sample_weight。
13.presort:bool, optional (default=False)
指定是否需要提前排序数据从而加速训练中寻找最优切分的过程。设置为True时,对于大数据集
会减慢总体的训练过程;但是对于一个小数据集或者设定了最大深度的情况下,会加速训练过程。
属性:
1.classes_:array of shape = [n_classes] or a list of such arrays
类别的标签值。
2.feature_importances_ : array of shape = [n_features]
特征重要性。越高,特征越重要。
特征的重要性为该特征导致的评价准则的(标准化的)总减少量。它也被称为基尼的重要性
3.max_features_ : int
max_features的推断值。
4.n_classes_ : int or list
类别的数量
5.n_features_ : int
执行fit后,特征的数量
6.n_outputs_ : int
执行fit后,输出的数量
7.tree_ : Tree object
树对象,即底层的决策树。
b) 加载数据:
选择有用的数据项[‘finLabel’, ‘BSSIDLabel’, ‘RoomLabel’],
对缺失值,填入-100
Train_data_f = pd.read_csv('TrainDT.csv')
Test_data_f = pd.read_csv('TestDT.csv')
imputer = Imputer(missing_values=np.nan, strategy='constant', fill_value=-100)
Train_data = pd.DataFrame(imputer.fit_transform(Train_data_f))
Test_data = pd.DataFrame(imputer.fit_transform(Test_data_f))
Train_data.columns = Train_data_f.columns
Test_data.columns = Test_data_f.columns
feature_train = Train_data_f[['finLabel', 'BSSIDLabel', 'RoomLabel']]
feature_test = Test_data_f[['finLabel', 'BSSIDLabel', 'RoomLabel']]
a) 数据处理:
将数据按 ‘finLabel’ 聚合。
采用所有样本BSSID集合的并集作为特征,如指纹 的BSSID集合为 :
B i = 〖 B S S I D 〗 j │ 〖 B S S I D 〗 j ∈ f i 。 B_i={〖BSSID〗_j│〖BSSID〗_j∈f_i }。 Bi=〖BSSID〗j│〖BSSID〗j∈fi。
并按照:
f 1 = [ 〖 B S S I D 〗 1 : 1 , 〖 B S S I D 〗 2 : 0 , 〖 B S S I D 〗 3 : 1 , 〖 B S S I D 〗 4 : 1 , 0 ] f_1=[〖BSSID〗_1:1,〖BSSID〗_2:0,〖BSSID〗_3:1,〖BSSID〗_4:1,0] f1=[〖BSSID〗1:1,〖BSSID〗2:0,〖BSSID〗3:1,〖BSSID〗4:1,0]
f 2 = [ 〖 B S S I D 〗 1 : 1 , 〖 B S S I D 〗 2 : 1 , 〖 B S S I D 〗 3 : 1 , 〖 B S S I D 〗 4 : 0 , 1 ] f_2=[〖BSSID〗_1:1,〖BSSID〗_2:1,〖BSSID〗_3:1,〖BSSID〗_4:0,1] f2=[〖BSSID〗1:1,〖BSSID〗2:1,〖BSSID〗3:1,〖BSSID〗4:0,1]
将输入转为向量。
BSSID_v = list(set(Train_data_f['BSSIDLabel']))
BSSID_l = len(BSSID_v)
tarin_bssid = feature_train.groupby('finLabel')
tarin_input = []
Train_data_classes = []
for i, v in tarin_bssid:
tmp = np.array(v['BSSIDLabel'])
tmpa = BSSID_l * [0]
for bssidv in BSSID_v:
if bssidv in tmp:
tmpa[BSSID_v.index(bssidv)] = 1
tarin_input.append(tmpa)
roomid = np.array(v['RoomLabel'])
Train_data_classes.append(roomid[1])
Train_data_inputs = np.array(tarin_input)
b) 建立决策树:
# 建立决策树
在此全部为默认参数了
decision_tree_classifier = DecisionTreeClassifier()
decision_tree_classifier.fit(Train_data_inputs, Train_data_classes)
decision_tree_output = decision_tree_classifier.predict(Test_data_inputs)
c) 在测试集上测试:
print('真实值是:')
print(Test_data_classes)
print('预测值是:')
print(decision_tree_output)
score = accuracy_score(Test_data_classes, decision_tree_output)
print(score)
2. 实验结果:
在测试集上accuracy_score达到1.0
