OpenCV图像处理--常用图像拼接方法
OpenCV常用图像拼接方法(一) :直接拼接
vconcat()—垂直方向拼接,要求待拼接图像有相同的宽度; hconcat()—水平方向拼接,要求待拼接图像有相同的高度。
使用vconcat()和hconcat()拼接则要求待拼接图像有相同的宽度或高度
Mat img = imread("girl.jpg");
vector<Mat>vImgs;
Mat result;
vImgs.push_back(img);
vImgs.push_back(img);
vconcat(vImgs, result); //垂直方向拼接
//hconcat(vImgs, result); //水平方向拼接
imshow("result",result);
cout << "Hello World!" << endl;
waitKey(0);

其他拼接函数
vector<Mat> images;
images.push_back(imread("stitch1.jpg"));
images.push_back(imread("stitch2.jpg"));
// 设置拼接模式与参数
Mat result1, result2, result3;
Stitcher::Mode mode = Stitcher::PANORAMA;
Ptr<Stitcher> stitcher = Stitcher::create(mode);
// 拼接方式-多通道融合
auto blender = detail::Blender::createDefault(detail::Blender::MULTI_BAND);
stitcher->setBlender(blender);
// 拼接
Stitcher::Status status = stitcher->stitch(images, result1);
// 平面曲翘拼接
auto plane_warper = makePtr<cv::PlaneWarper>();
stitcher->setWarper(plane_warper);
status = stitcher->stitch(images, result2);
// 鱼眼拼接
auto fisheye_warper = makePtr<cv::FisheyeWarper>();
stitcher->setWarper(fisheye_warper);
status = stitcher->stitch(images, result3);
// 检查返回
if (status != Stitcher::OK)
{
cout << "Can't stitch images, error code = " << int(status) << endl;
return EXIT_FAILURE;
}
imshow("result1.png", result1);
imshow("result2.png", result2);
imshow("result3.png", result3);
waitKey(0);
图示:
OpenCV常用图像拼接方法(二) :基于模板匹配拼接
- 适用范围:图像有重合区域,且待拼接图像之间无明显尺度变化和畸变。
- 优点:简单、快速(相比于SIFT特征匹配拼接)。
- 常用实例:两个相邻相机水平拍摄图像拼接。
截取如下两部分ROI作为待拼接图像。
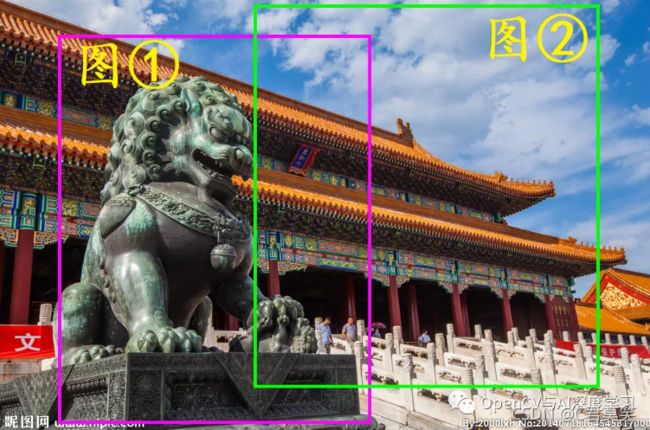
待拼接图①:

待拼接图②:

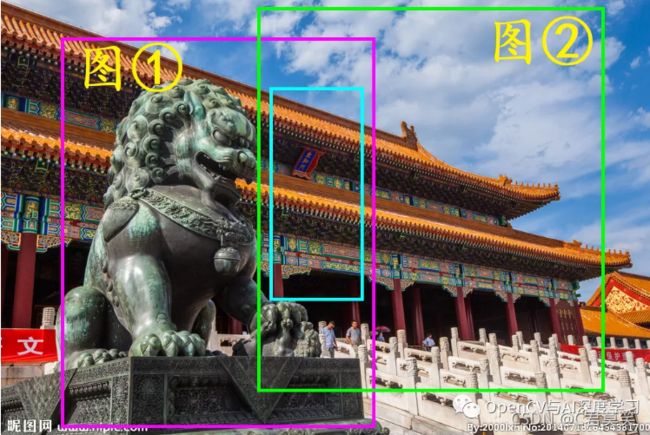
思路:在图①中截取部分公共区域ROI作为模板,利用模板在图②中匹配,得到最佳匹配位置后计算X和Y方向需要平移的像素距离,将图②对应的拼接到大图中。如下,模板为青色区域:
部分代码和效果如下:
Mat imgL = imread("A.jpg");
Mat imgR = imread("B.jpg");
double start = getTickCount();
Mat grayL, grayR;
cvtColor(imgL, grayL, COLOR_BGR2GRAY);
cvtColor(imgR, grayR, COLOR_BGR2GRAY);
Rect rectCut = Rect(372, 122, 128, 360);
Rect rectMatched = Rect(0, 0, imgR.cols / 2, imgR.rows);
Mat imgTemp = grayL(Rect(rectCut));
Mat imgMatched = grayR(Rect(rectMatched));
int width = imgMatched.cols - imgTemp.cols + 1;
int height = imgMatched.rows - imgTemp.rows + 1;
Mat matchResult(height, width, CV_32FC1);
matchTemplate(imgMatched, imgTemp, matchResult, TM_CCORR_NORMED);
normalize(matchResult, matchResult, 0, 1, NORM_MINMAX, -1); //归一化到0--1范围
double minValue, maxValue;
Point minLoc, maxLoc;
minMaxLoc(matchResult, &minValue, &maxValue, &minLoc, &maxLoc);
Mat dstImg(imgL.rows, imgR.cols + rectCut.x - maxLoc.x, CV_8UC3, Scalar::all(0));
Mat roiLeft = dstImg(Rect(0, 0, imgL.cols, imgL.rows));
imgL.copyTo(roiLeft);
Mat debugImg = imgR.clone();
rectangle(debugImg, Rect(maxLoc.x, maxLoc.y, imgTemp.cols, imgTemp.rows), Scalar(0, 255, 0), 2, 8);
imwrite("match.jpg", debugImg);
Mat roiMatched = imgR(Rect(maxLoc.x, maxLoc.y - rectCut.y, imgR.cols - maxLoc.x, imgR.rows - 1 - (maxLoc.y - rectCut.y)));
Mat roiRight = dstImg(Rect(rectCut.x, 0, roiMatched.cols, roiMatched.rows));
roiMatched.copyTo(roiRight);
double end = getTickCount();
double useTime = (end - start) / getTickFrequency();
cout << "use-time : " << useTime << "s" << endl;
imwrite("dst.jpg", dstImg);
cout << "Done!" << endl;
匹配结果:

拼接结果:

OpenCV常用图像拼接方法(三) :SIFT特征匹配拼接方法
特点和适用范围:图像有足够重合相同特征区域,且待拼接图像之间无明显尺度变换和畸变。
优点:适应部分倾斜变化情况。缺点:需要有足够的相同特征区域进行匹配,速度较慢,拼接较大图片容易崩溃。
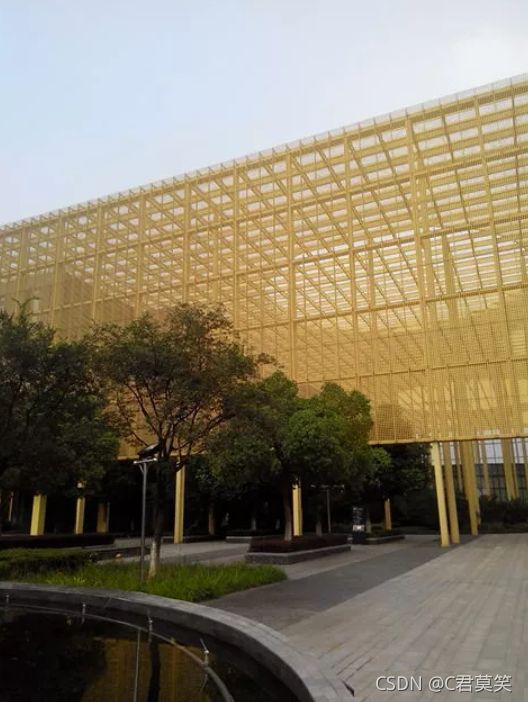
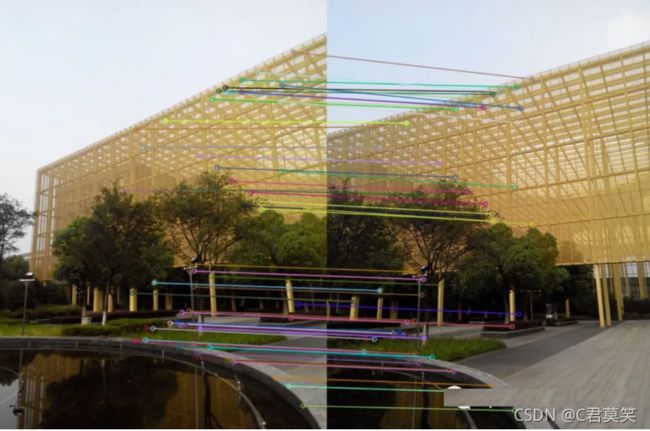
如下是待拼接的两张图片:

特征匹配图:
拼接结果图:

拼接缝处理后(拼接处过渡更自然):
/********************直接图像拼接函数*************************/
bool ImageOverlap0(Mat &img1, Mat &img2)
{
Mat g1(img1, Rect(0, 0, img1.cols, img1.rows)); // init roi
Mat g2(img2, Rect(0, 0, img2.cols, img2.rows));
cvtColor(g1, g1, COLOR_BGR2GRAY);
cvtColor(g2, g2, COLOR_BGR2GRAY);
vector<cv::KeyPoint> keypoints_roi, keypoints_img; /* keypoints found using SIFT */
Mat descriptor_roi, descriptor_img; /* Descriptors for SIFT */
FlannBasedMatcher matcher; /* FLANN based matcher to match keypoints */
vector<cv::DMatch> matches, good_matches;
cv::Ptr<cv::SIFT> sift = cv::SIFT::create();
int i, dist = 80;
sift->detectAndCompute(g1, cv::Mat(), keypoints_roi, descriptor_roi); /* get keypoints of ROI image */
sift->detectAndCompute(g2, cv::Mat(), keypoints_img, descriptor_img); /* get keypoints of the image */
matcher.match(descriptor_roi, descriptor_img, matches); //实现描述符之间的匹配
double max_dist = 0; double min_dist = 5000;
//-- Quick calculation of max and min distances between keypoints
for (int i = 0; i < descriptor_roi.rows; i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
// 特征点筛选
for (i = 0; i < descriptor_roi.rows; i++)
{
if (matches[i].distance < 3 * min_dist)
{
good_matches.push_back(matches[i]);
}
}
printf("%ld no. of matched keypoints in right image\n", good_matches.size());
/* Draw matched keypoints */
Mat img_matches;
//绘制匹配
drawMatches(img1, keypoints_roi, img2, keypoints_img,
good_matches, img_matches, Scalar::all(-1),
Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("matches", img_matches);
vector<Point2f> keypoints1, keypoints2;
for (i = 0; i < good_matches.size(); i++)
{
keypoints1.push_back(keypoints_img[good_matches[i].trainIdx].pt);
keypoints2.push_back(keypoints_roi[good_matches[i].queryIdx].pt);
}
//计算单应矩阵(仿射变换矩阵)
Mat H = findHomography(keypoints1, keypoints2, RANSAC);
Mat H2 = findHomography(keypoints2, keypoints1, RANSAC);
Mat stitchedImage; //定义仿射变换后的图像(也是拼接结果图像)
Mat stitchedImage2; //定义仿射变换后的图像(也是拼接结果图像)
int mRows = img2.rows;
if (img1.rows > img2.rows)
{
mRows = img1.rows;
}
int count = 0;
for (int i = 0; i < keypoints2.size(); i++)
{
if (keypoints2[i].x >= img2.cols / 2)
count++;
}
//判断匹配点位置来决定图片是左还是右
if (count / float(keypoints2.size()) >= 0.5) //待拼接img2图像在右边
{
cout << "img1 should be left" << endl;
vector<Point2f>corners(4);
vector<Point2f>corners2(4);
corners[0] = Point(0, 0);
corners[1] = Point(0, img2.rows);
corners[2] = Point(img2.cols, img2.rows);
corners[3] = Point(img2.cols, 0);
stitchedImage = Mat::zeros(img2.cols + img1.cols, mRows, CV_8UC3);
warpPerspective(img2, stitchedImage, H, Size(img2.cols + img1.cols, mRows));
perspectiveTransform(corners, corners2, H);
/*
circle(stitchedImage, corners2[0], 5, Scalar(0, 255, 0), 2, 8);
circle(stitchedImage, corners2[1], 5, Scalar(0, 255, 255), 2, 8);
circle(stitchedImage, corners2[2], 5, Scalar(0, 255, 0), 2, 8);
circle(stitchedImage, corners2[3], 5, Scalar(0, 255, 0), 2, 8); */
cout << corners2[0].x << ", " << corners2[0].y << endl;
cout << corners2[1].x << ", " << corners2[1].y << endl;
imshow("temp", stitchedImage);
//imwrite("temp.jpg", stitchedImage);
Mat half(stitchedImage, Rect(0, 0, img1.cols, img1.rows));
img1.copyTo(half);
imshow("result", stitchedImage);
}
else //待拼接图像img2在左边
{
cout << "img2 should be left" << endl;
stitchedImage = Mat::zeros(img2.cols + img1.cols, mRows, CV_8UC3);
warpPerspective(img1, stitchedImage, H2, Size(img1.cols + img2.cols, mRows));
imshow("temp", stitchedImage);
//计算仿射变换后的四个端点
vector<Point2f>corners(4);
vector<Point2f>corners2(4);
corners[0] = Point(0, 0);
corners[1] = Point(0, img1.rows);
corners[2] = Point(img1.cols, img1.rows);
corners[3] = Point(img1.cols, 0);
perspectiveTransform(corners, corners2, H2); //仿射变换对应端点
/*
circle(stitchedImage, corners2[0], 5, Scalar(0, 255, 0), 2, 8);
circle(stitchedImage, corners2[1], 5, Scalar(0, 255, 255), 2, 8);
circle(stitchedImage, corners2[2], 5, Scalar(0, 255, 0), 2, 8);
circle(stitchedImage, corners2[3], 5, Scalar(0, 255, 0), 2, 8); */
cout << corners2[0].x << ", " << corners2[0].y << endl;
cout << corners2[1].x << ", " << corners2[1].y << endl;
Mat half(stitchedImage, Rect(0, 0, img2.cols, img2.rows));
img2.copyTo(half);
imshow("result", stitchedImage);
}
imwrite("result.bmp", stitchedImage);
return true;
}
OpenCV常用图像拼接方法(四) :SURF特征匹配拼接方法
参考链接:
https://www.cnblogs.com/skyfsm/p/7411961.html
https://www.cnblogs.com/skyfsm/p/7401523.html