聚类算法(K-Means和DBSCAN)
聚类算法(K-Means和DBSCAN)
目录
一、无监督学习与聚类算法
1、旨在理解数据自然机构的聚类
2、用于数据处理的聚类
二、核心概念
1、聚类分析
2、簇
三、基于原型的技术:K-Means
1、基于原型的簇
2、K-means的基本定义
3、算法执行细节
四、使用sklearn实现K-Means
1、重要参数:n_clusters
2、聚类算法的模型评估指标:轮廓系数
3、案例:基础轮廓系数来选择n_clusters
4、重要参数init &random_state&n_init
5、重要参数max_iter &tol
五、基于密度的聚类算法:DBSCAN
1、DBSCAN基本原理
2、DBSCAN算法执行过程
3、sklearn实践
一、无监督学习与聚类算法
决策树、线性和逻辑回归都是比较常用的机器学习算法,他们虽然有着不同的功能,但却都属于 “有监督学习” 的一部分,即是说,模型在训练的时候,即需要特征矩阵X,也需要真实标签y。机器学习当中,还有相当一部分算法属于 “无监督学习” ,无监督的算法在训练的时候只需要特征矩阵X,不需要标签。无监督学习的代表算法有聚类算法、降维算法。

聚类算法是无监督类机器学习算法中最常用的一类,其目的是将数据划分成有意义或有用的组(也被称为簇)。这种划分可以基于我们的业务需求或建模需求来完成,也可以单纯地帮助我们探索数据的自然结构和分布。如果目标是划分成有意义的组,则簇应当捕获数据的自然结构。然而,在某种意义下,聚类分析只是解决其他问题(如数据汇总)的起点。无论是旨在理理解还是应用,聚类分析都在广泛的领域扮演着重要角色。这些领域包括:心理理学和其他社会科学、生物学、统计学、模式识别、信息检索、机器学习和数据挖掘。
1、旨在理解数据自然机构的聚类
在对世界的分析和描述中,类,或在概念上有意义的具有公共特性的对象组,扮演着重要的角色。的确,人类擅长将对象划分成组(聚类),并将特定的对象指派到这些组(分类)。例如,即使很小的孩子也能很快地将图片上的对象标记为建筑物、车辆、人、动物、植物等。就理解数据而言,簇是潜在的类,而聚类分析是研究自动发现这些类的的技术。比如生物学、信息搜索、气候、商业、心理学和医学等。
2、用于数据处理的聚类
聚类分析提供由个别数据对象到数据对象所指派的簇的抽象。此外,一些聚类技术使用簇原型(即同一个簇中用于代表其他对象的数据对象,例如质心等)来刻画簇特征。这些簇原型可以用作大量量数据分析和数据处理理技术的基础。因此,就聚类用于数据处理层面而言,聚类分析是研究发现最有代表性的簇原型的技术。
①数据降维
许多数据分析技术,如回归和PCA,都具有 O ( m 2 ) O(m^2) O(m2) 或更高的时间或空间复杂度(其中是对象的个数)。因此对于大型数据集,这些技术不切实际。然而,可以将算法用于仅包含簇原型的数据集,即每一列只保留留其原型,而不是整个数据集。依赖分析类型、原型个数和原型代表数据的精度,行汇总结果可以与使用所有数据得到的结果相媲美。
②数据离散压缩
簇原型可以用于数据列压缩。例如,创建一个包含所有簇原型的表,即每个原型赋予一个整数值,作为它在表中的位置(索引)。每个对象用于它所在的簇相关联的原型的索引表示。这类压缩称作向量量化(vector quantization),并常用于图像、声音和视频数据。无论是用于数据降维还是离散压缩,都将损失一定的数据信息量,而能够使用聚类进行信息浓缩的数据的特点是:
(1)许多数据对象之间高度相似
(2)某些信息丢失是可以接受的
(3)希望大幅度压缩数据量
③有效地发现最近邻
很多机器学习算法都是基于距离的模型,即找出最近邻可能需要计算所有点对点之间的距离,如之前介绍的KNN。通常我们可以使用簇原型减少发现对象最近邻所需要计算的距离的数目。直观地说,如果两个簇原型相距很远,则对应簇中的对象不可能互为近邻。这样,为了找出一个对象的最近邻,只需要计算到邻近簇中对象的距离,其中两个簇的邻近性用其原型之间的距离度量,从而大幅降低KNN类算法的计算量。
二、核心概念
1、聚类分析
聚类分析仅根据在数据中发现的描述对象及其关系的信息,将数据对象分组。其目标是,组内的对象相互之间是相似的(相关的),而不同组中的对象是不同的(不不相关的)。组内的相似性(同质性)越大,组间差别越大,聚类就越好。
2、簇
简单来说,簇就是分类结果的类,但实际上簇并没有明确的定义,并且簇的划分没有客观标准,
聚类分析与其他将数据对象分组的技术相关。例如,聚类可以看作一种分类,它用类(簇)标号创建对象的标记。然而,只能从数据导出这些标号。相比之下,KNN则是监督分类(supervisedclassfication),即使用由类标号已知的对象开发的模型,对新的、无标记的对象赋予类标号。为此,有时称聚类分析为非监督分类(unsupervised classification)。在数据挖掘中,不附加任何条件使用术语分类时,通常是指监督分类。
三、基于原型的技术:K-Means
1、基于原型的簇
此时簇是对象的集合,并且其中每个对象到定义该簇的原型的距离比到其他簇的原型的距离更更近(或更加相似)。对于具有连续属性的数据,簇的原型通常是质心,即簇中所有点的平均值。当质心没有意义时(例如当数据具有分类属性时),原型通常是中心点,即簇中最有代表性的点。对于许多数据类型,原型可以视为最靠近中心的点;在这种情况下,通常把基于原型的簇看作基于中心的簇(center-basedcluster)。毫无疑问,这种簇趋向于呈球状。下图是一个基于中心簇的例子。

2、K-means的基本定义
K均值算法,首先,选择K个初始质心,其中K是我们指定的参数,即所期望的簇的个数。每个点指派到最近的质心,而指派到一个质心的点集为一个簇。然后,根据指派到簇的点,更新每个簇的质心。重复指派和更新步骤,直到簇不发生变化,或等价地,直到质心不发生变化。
Means的核⼼心任务就是根据我们设定好的K,找出K个最优的质⼼心,并将离这些质⼼心最近的数据分别分配到这些质⼼心代表的簇中去。具体过程可以总结如下:
创建k个点作为初始质心(通常是随机选择)
当任意一个点的簇分配结果发生改变时:
对数据集中的每个点:
对每个质心:
计算质心与数据点之间的距离
将数据点分配到据其最近的簇
对每个簇,计算簇中所有点的均值并将均值作为新的质心
直到簇不再发生变化或者达到最大迭代次数
那什么情况下,质心的位置会不再变化呢?当我们找到一个质⼼心,在每次迭代中被分配到这个质心上的样本都是一致的,即每次新生成的簇都是一致的,所有的样本点都不会再从一个簇转移到另一个簇,质心就不会变化了。
3、算法执行细节
我们认为,被分在同一个簇中的数据是有相似性的,而不同簇中的数据是不同的,当聚类完毕之后,我们就要分别去研究每个簇中的样本都有什么样的性质,从而根据业务需求制定不同的商业或者科技策略。聚类算法的目的就是追求“簇内差异小,簇外差异大”。而这个“差异“,由样本点到其所在簇的质心的距离来衡量。
对于一个簇来说,所有样本点到质心的距离之和越小,我们就认为这个簇中的样本越相似,簇内差异就越小。而距离的衡量方法有多种,令 x x x表示簇中的一个样本点, u u u表示该簇中的质心,n表示每个样本点中的特征数目,i表示组成点的每个特征,则该样本点到质心的距离可以由以下距离来度量。
3.1、距离衡量方法
常见距离衡量方法即对应公式如下所示:
①数据距离
对于数据之间的距离而言,在欧式空间中我们常常使用欧几里得距离,也就是我们常说的距离平方和开平方,其基本计算公式如下:
d ( x , μ ) = ∑ i = 1 n ( x i − μ i ) 2 d(x,\mu )=\sqrt{\sum_{i=1}^{n}(x_i-\mu _i)^{2}} d(x,μ)=i=1∑n(xi−μi)2
还有曼哈顿距离,也被称作街道距离,该距离的计算方法相当于是欧式距离的1次方表示形式,其基本计算公式如下:
d ( x , μ ) = ∑ i = 1 n ( ∣ x i − μ ∣ ) d(x,\mu )=\sum_{i=1}^{n}(\left | x_i-\mu \right |) d(x,μ)=i=1∑n(∣xi−μ∣)
当然,不管是欧式距离还是曼哈顿距离,都可视为闵可夫斯基距离的一种特例例,该距离计算公式如下:
d ( x , μ ) = ∑ i = 1 n ( ∣ x i − μ ∣ ) n n d(x,\mu )=\sqrt[n]{\sum_{i=1}^{n}(\left | x_i-\mu \right |)^{n}} d(x,μ)=ni=1∑n(∣xi−μ∣)n
当为1时,就是曼哈顿距离,当为2时即为欧式距离,当趋于无穷时,即为切比雪夫距离。
②文本距离
而除了数据距离之外,距离的衡量还常见于文本数据之间,此时我们常用余弦相似性或杰卡德相似度来进行衡量,余弦相似性计算本质上就是计算余弦夹角,其基本计算公式如下:
c o s θ = ∑ 1 n ( x i ∗ μ ) ∑ 1 n ( x i ) 2 ∗ ∑ 1 n ( μ ) 2 cos\theta =\frac{\sum_{1}^{n}(x_i*\mu )}{\sqrt{\sum_{1}^{n}(x_i)^{2}}*\sqrt{\sum_{1}^{n}(\mu )^{2}}} cosθ=∑1n(xi)2∗∑1n(μ)2∑1n(xi∗μ)
3.2、误差平方和SSE(Sum of the Squared Error,SSE)
此处引入机器学习算法中非常重要的概念,误差平方和,也被称为组内误差平方和。该概念在聚类和回归算法中均有广泛应用。在聚类算法中所谓误差平方和是指每个数据点的误差,即它到最近所属类别质心的欧几里得距离,然后求和汇总既得误差平方和。在聚类算法中,SSE是我们判断模型是否最优的重要指标,我们希望求得的模型是在给定K值得情况下SSE最小的模型,即在相同的K值情况下聚类模型SSE越小越好,这也是聚类算法最核心的优化条件。
3.3、聚类目标函数和质心计算方法
聚类算法中的目标函数是实现聚类这一目标所使用的函数,如最小化对象到其所属类的质心距离等,这里需要注意,一般如果采用距离作为邻近度衡量标准,则目标函数往往是利用最小距离来构建聚类类别,而若采用相似度作为邻近度衡量标准,则目标函数就是利用最大化相似度和来构建聚类类别。而质心是聚类类别的原型,一般可用均值或中位数来表示。但无论如何,在一旦确定距离衡量方法或邻近度函数(如欧式距离等),并在模型优化条件(SSE最小)的指导下,目标函数和质心选取方法都会随之确定,常用邻近度函数、质心和目标函数组合如下:

而数学理论推导方法之一就是利用梯度下降进行计算。梯度下降是机器学习中最常用的局部最优化方法,首先,我们需要定义聚类算法中的符号集:

然后,误差平方和可由下列计算公式表示:
S S E = ∑ i = 1 k ∑ x ϵ c i ( c i − x ) 2 SSE=\sum_{i=1}^{k}\sum_{x\epsilon c_i}^{}(c_i-x)^{2} SSE=i=1∑kxϵci∑(ci−x)2
其中, C i C_i Ci是第 i i i个簇, x x x是 C i C_i Ci中的点, c i c_i ci是第 i i i个簇的质⼼心。我们这里验证最常用的,当采用欧式距离时当且仅当质心为均值的时候才能够保证在目标函数的聚类过程中SSE保持最小。
要保证在给定K值情况下总SSE最小,则用梯度下降理论工具可将问题转化为为了保证总SSE最小,K的每一步取值,即K值每增加1,都要能够最大程度降低SSE,即在给定K值步长为1的情况下去找SSE下降速度最快的坡度(详见逻辑回归)。即簇的最小化SSE的最佳质心是簇中各点的均值。同样可类似证明采用曼哈顿距离时最佳质心选取方案是选取中位数,而当采用余弦夹角衡量相似度时,均值是最佳的质心计算方法。(具体推导过程可参考我的逻辑回归推导,等有空我也会整理推导过程)
四、使用sklearn实现K-Means
class sklearn.cluster.KMeans (n_clusters=8, init=’k-means++’, n_init=10, max_iter=300, tol=0.0001,precompute_distances=’auto’, verbose=0, random_state=None, copy_x=True, n_jobs=None,algorithm=’auto’)
1、重要参数:n_clusters
n_clusters是K-Means中的k,表示着我们告诉模型我们要分几类。这是K-Means当中唯一一个必填的参数,默认为8类,但通常我们的聚类结果会是一个小于8的结果。通常,在开始聚类之前,我们并不知道n_clusters究竟是多少,因此我们要对它进行探索。可以通过绘图先观察一下这个数据集的数据分布,以此来为我们聚类时输入的n_clusters做一个参考。
import matplotlib.pyplot as plt
from sklearn.datasets import make_blobs
#自己创建数据集
X, y = make_blobs(n_samples=500,n_features=2,centers=4,random_state=1)
plt.scatter(X[:, 0], X[:, 1]
,marker='o' #点的形状
,s=8 #点的大小
);
#如果我们想要看见这个点的分布,怎么办?
color = ["red","pink","orange","gray"]
for i in range(4):
plt.scatter(X[y==i, 0], X[y==i, 1]
,marker='o' #点的形状
,s=8 #点的大小
,c=color[i])
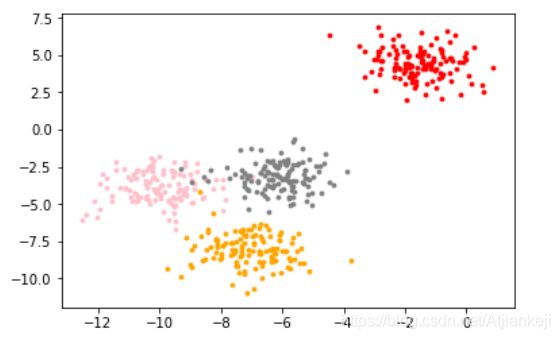
基于上面画图的分布,我们要猜测一下,这个数据中大概有几簇,再来使用K-Means进行聚类。
from sklearn.cluster import KMeans
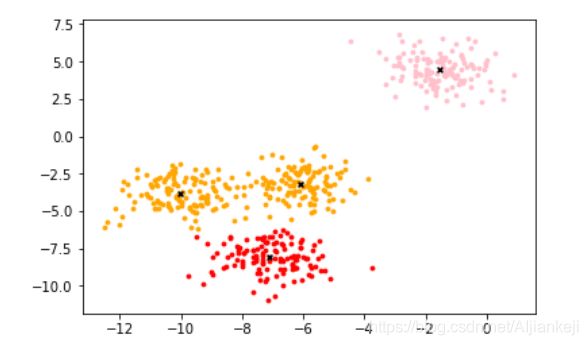
n_clusters=4
cluster = KMeans(n_clusters=n_clusters,random_state=0).fit(X)
#重要属性labels_,查看聚好的类别,每个样本所对应的类
y_pred = cluster.labels_
y_pred
#KMeans因为并不需要建立模型或者预测结果,因此我们只需要fit就能够得到聚类结果了
#KMeans也有接口predict和fit_predict,表示学习数据X并对X的类进行预测
#但所得到的结果和我们不调用predict,直接fit之后调用属性labels一模一样
pre = cluster.fit_predict(X)
pre == y_pred
#我们什么时候需要predict呢?当数据量太大的时候!
#其实我们不必使用所有的数据来寻找质心,少量的数据就可以帮助我们确定质心了
#当我们数据量非常大的时候,我们可以使用部分数据来帮助我们确认质心
#剩下的数据的聚类结果,使用predict来调用
#重要属性cluster_centers_,查看质心
centroid = cluster.cluster_centers_
centroid
#重要属性inertia_,查看总距离平方和SSE
inertia = cluster.inertia_
inertia
#画图看看
color = ["red","pink","orange","gray"]
for i in range(n_clusters):
plt.scatter(X[y_pred==i, 0], X[y_pred==i, 1]
,marker='o' #点的形状
,s=8 #点的大小
,c=color[i]
)
plt.scatter(c[:,0],c[:,1]
,marker="x"
,s=15
,c="black")
2、聚类算法的模型评估指标:轮廓系数
不同于分类模型和回归,聚类算法的模型评估不是一件简单的事。在分类中,有直接结果(标签)的输出,并且分类的结果有正误之分,所以我们使用预测的准确度,混淆矩阵,ROC曲线等指标来进行评估,但无论如何评估,都是在”模型找到正确答案“的能力。而回归中,由于要拟合数据,我们有MSE均方误差,有损失函数来衡量模型的拟合程度。但这些衡量指标都不能够适用于聚类。
K-Means的目标是确保“簇内差异小,簇外差异大”,我们就可以通过衡量簇内差异来衡量聚类的效果。我们刚才说过,SSE是用距离来衡量簇内差异的指标,因此,我们是否可以使用SSE来作为聚类的衡量指标呢?
SSE的缺点和局限
①SSE无界,SSE越小越好,是0最好,但是多小的SSE是最好的,
②SSE的计算容易受特征数目的影响,维度大SSE的计算量会陷入维度诅咒之中,
③它会受超参数K值的影响,随着K越大,SSE一定会越来越小,但这不代表模型的效果越来越好了,
④SSE对数据的分布有假设,它假设数据满足凸分布(即数据在二维平面图像上看起来是一个凸函数的样子),并且它假设数据是各向同性的(isotropic),即是说数据的属性在不同方向上代表着相同的含义。但是现实中的数据往往不是这样。所以使用Inertia作为评估指标,会让聚类算法在一些细长簇,环形簇,或者不规则形状的流形时表现不佳。
这里我们须完全依赖评价簇内的稠密程度(簇内差异⼩小)和簇间的离散程度(簇外差异大)来评估聚类的效果。其中轮廓系数是最常用的聚类算法的评价指标。它是对每个样本来定义的,它能够同时衡量:
①样本与其自身所在的簇中的其他样本的相似度a,等于样本与同一簇中所有其他点之间的平均距离
②样本与其他簇中的样本的相似度b,等于样本与下一个最近的簇中的所有点之间的平均距离
根据聚类的要求 ”簇内差异小,簇外差异大“,我们希望b永远大于a,并且大得越多越好
单个样本的轮廓系数计算为:
s = b − a m a x ( a , b ) s=\frac{b-a}{max(a,b)} s=max(a,b)b−a
这个公式可以解析为:
s = { 1 − a / b i f a < b 0 i f a = b b / a − 1 i f a > b s=\left\{\begin{matrix} 1-a/b& ifab \end{matrix}\right. s=⎩⎨⎧1−a/b0b/a−1ifa<bifa=bifa>b
轮廓系数范围是(-1,1),其中值越接近1表示样本与自己所在的簇中的样本很相似,并且与其他簇中的样本不相似,当样本点与簇外的样本更相似的时候,轮廓系数就为负。当轮廓系数为0时,则代表两个簇中的样本相似度一致,两个簇本应该是一个簇。
如果一个簇中的大多数样本具有比较高的轮廓系数,则簇会有较高的总轮廓系数,则整个数据集的平均轮廓系数越高,则聚类是合适的。如果许多样本点具有低轮廓系数甚至负值,则聚类是不合适的,聚类的超参数K可能设定得太大或者太小。
在sklearn中,我们使用模块metrics中的类silhouette_score来计算轮廓系数,它返回的是一个数据集中,所有样本的轮廓系数的均值。但我们还有同在metrics模块中的silhouette_sample,它的参数与轮廓系数一致,但返回的是数据集中每个样本自己的轮廓系数。
轮廓系数有很多优点,它在有限空间中取值,使得我们对模型的聚类效果有一个“参考”。并且,轮廓系数对数据的分布没有假设,因此在很多数据集上都表现良好。但它在每个簇的分割比较清晰时表现最好。但轮廓系数也有缺陷,它在凸型的类上表现会虚高,比如基于密度进行的聚类,或通过DBSCAN获得的聚类结果,如果使用轮廓系数来衡量,则会表现出比真实聚类效果更高的分数。
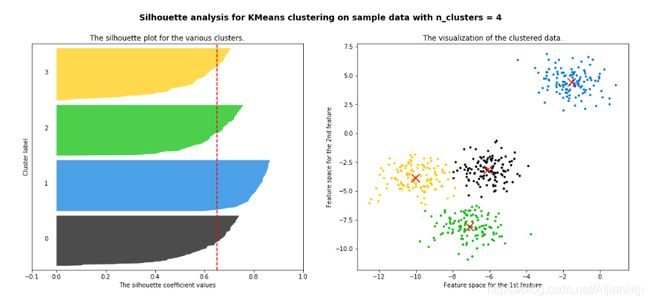
3、案例:基础轮廓系数来选择n_clusters
我们通常会绘制轮廓系数分布图和聚类后的数据分布图来选择我们的最佳n_clusters。
from sklearn.cluster import KMeans
from sklearn.metrics import silhouette_samples, silhouette_score
import matplotlib.pyplot as plt
import matplotlib.cm as cm # colormap
import numpy as np
#先设定我们要分成的簇数
n_clusters = 4
#创建一个画布,画布上共有一行两列两个图
fig, (ax1, ax2) = plt.subplots(1, 2)
#画布尺寸
fig.set_size_inches(18, 7)
# 第一个图是我们的轮廓系数图像,是由各个簇的轮廓系数组成的横向条形图
# 横向条形图的横坐标是我们的轮廓系数取值,纵坐标是我们的每个样本,因为轮廓系数是对于每一个样本进行计算的
# 首先我们来设定横坐标
# 轮廓系数的取值范围在[-1,1]之间,但我们至少是希望轮廓系数要大于0的
# 太长的横坐标不利于我们的可视化,所以只设定X轴的取值在[-0.1,1]之间
ax1.set_xlim([-0.1, 1])
# 接下来设定纵坐标,通常来说,纵坐标是从0开始,最大值取到X.shape[0]的取值
# 但我们希望,每个簇能够排在一起,不同的簇之间能够有一定的空隙
# 以便我们看到不同的条形图聚合成的块,理解它是对应了哪一个簇
# 因此我们在设定纵坐标的取值范围的时候,在X.shape[0]上,加上一个距离(n_clusters + 1) * 10,留作间隔用
ax1.set_ylim([0, X.shape[0] + (n_clusters + 1) * 10])
# 开始建模,调用聚类好的标签
clusterer = KMeans(n_clusters=n_clusters, random_state=10).fit(X)
cluster_labels = clusterer.labels_
# 调用轮廓系数分数,注意,silhouette_score生成的是所有样本点的轮廓系数均值
# 两个需要输入的参数是,特征矩阵X和聚类完毕后的标签
silhouette_avg = silhouette_score(X, cluster_labels)
#用print来报一下结果,现在的簇数量下,整体的轮廓系数究竟有多少
print("For n_clusters =", n_clusters,
"The average silhouette_score is :", silhouette_avg)
# 调用silhouette_samples,返回每个样本点的轮廓系数,这就是我们的横坐标
sample_silhouette_values = silhouette_samples(X, cluster_labels)
#设定y轴上的初始取值
y_lower = 10
#接下来,对每一个簇进行循环
for i in range(n_clusters):
# 从每个样本的轮廓系数结果中抽取出第i个簇的轮廓系数,并对他进行排序
ith_cluster_silhouette_values = sample_silhouette_values[cluster_labels == i]
#注意, .sort()这个命令会直接改掉原数据的顺序
ith_cluster_silhouette_values.sort()
#查看这一个簇中究竟有多少个样本
size_cluster_i = ith_cluster_silhouette_values.shape[0]
#这一个簇在y轴上的取值,应该是由初始值(y_lower)开始,到初始值+加上这个簇中的样本数量结束(y_upper)
y_upper = y_lower + size_cluster_i
#colormap库中的,使用小数来调用颜色的函数
#在nipy_spectral([输入任意小数来代表一个颜色])
#在这里我们希望每个簇的颜色是不同的,我们需要的颜色种类刚好是循环的个数的种类
#在这里,只要能够确保,每次循环生成的小数是不同的,可以使用任意方式来获取小数
#在这里,我是用i的浮点数除以n_clusters,在不同的i下,自然生成不同的小数
#以确保所有的簇会有不同的颜色
color = cm.nipy_spectral(float(i)/n_clusters)
#开始填充子图1中的内容
#fill_between是填充曲线与直角之间的空间的函数
#fill_betweenx的直角是在纵坐标上
#fill_betweeny的直角是在横坐标上
#fill_betweenx的参数应该输入(定义曲线的点的横坐标,定义曲线的点的纵坐标,柱状图的颜色)
ax1.fill_betweenx(np.arange(y_lower, y_upper)
,ith_cluster_silhouette_values
,facecolor=color
,alpha=0.7
)
#为每个簇的轮廓系数写上簇的编号,并且让簇的编号显示坐标轴上每个条形图的中间位置
#text的参数为(要显示编号的位置的横坐标,要显示编号的位置的纵坐标,要显示的编号内容)
ax1.text(-0.05 , y_lower + 0.5 * size_cluster_i , str(i))
# 为下一个簇计算新的y轴上的初始值,是每一次迭代之后,y的上线再加上10
#以此来保证,不同的簇的图像之间显示有空隙
y_lower = y_upper + 10
#给图1加上标题,横坐标轴,纵坐标轴的标签
ax1.set_title("The silhouette plot for the various clusters.")
ax1.set_xlabel("The silhouette coefficient values")
ax1.set_ylabel("Cluster label")
#把整个数据集上的轮廓系数的均值以虚线的形式放入我们的图中
ax1.axvline(x=silhouette_avg, color="red", linestyle="--")
#让y轴不显示任何刻度
ax1.set_yticks([])
#让x轴上的刻度显示为我们规定的列表
ax1.set_xticks([-0.1, 0, 0.2, 0.4, 0.6, 0.8, 1])
#开始对第二个图进行处理,首先获取新颜色,由于这里没有循环,因此我们需要一次性生成多个小数来获取多个颜色
colors = cm.nipy_spectral(cluster_labels.astype(float) / n_clusters)
ax2.scatter(X[:, 0], X[:, 1]
,marker='o' #点的形状
,s=8 #点的大小
,c=colors
)
#把生成的质心放到图像中去
centers = clusterer.cluster_centers_
# Draw white circles at cluster centers
ax2.scatter(centers[:, 0], centers[:, 1], marker='x',
c="red", alpha=1, s=200)
#为图二设置标题,横坐标标题,纵坐标标题
ax2.set_title("The visualization of the clustered data.")
ax2.set_xlabel("Feature space for the 1st feature")
ax2.set_ylabel("Feature space for the 2nd feature")
#为整个图设置标题
plt.suptitle(("Silhouette analysis for KMeans clustering on sample data "
"with n_clusters = %d" % n_clusters),
fontsize=14, fontweight='bold')
plt.show()
4、重要参数init &random_state&n_init
在K-Means中有一个重要的环节,就是放置初始质心。如果有足够的时间,K-means一定会收敛,但Inertia可能收敛到局部最小值。是否能够收敛到真正的最小值很大程度上取决于质心的初始化。init就是用来帮助我们决定初始化方式的参数。
初始质心放置的位置不同,聚类的结果很可能也会不一样,一个好的质心选择可以让K-Means避免更多的计算,让算法收敛稳定且更快。在之前我们是使用”随机“的方法在样本点中抽取k个样本作为初始质心,这种方法显然不符合”稳定且更快“的需求。为此,我们可以使用random_state参数来控制每次生成的初始质心都在相同位置,甚至可以画学习曲线来确定最优的random_state是哪个整数。
一个random_state对应一个质心随机初始化的随机数种子。如果不指定随机数种子,则sklearn中的KMeans并不会只选择一个随机模式扔出结果,而会在每个随机数种子下运行多次,并使用结果最好的一个随机数种子来作为初始质心。我们可以使用参数n_init来选择,每个随机数种子下运行的次数。这个参数不常用到,默认10次,如果我们希望运行的结果更加精确,那我们可以增加这个参数n_init的值来增加每个随机数子下运行的次数。
然⽽这种方法依然是基于随机性的。为了优化选择初始质心的方法,2007年年Arthur, David, and Sergei Vassilvitskii三人发表了了论文“kmeans++:The advantages of careful seeding”,他们开发了”k-means ++“初始化方案,使得初始质心(通常)彼此远离,以此来引导出比随机初始化更可靠的结果。在sklearn中,我们使用参数init ='kmeans++'来选择使用k-means ++作为质心初始化的方案。通常来说,我建议保留留默认的"kmeans++"的方法。
init:可输入"k-means++",“random"或者一个n维数组
初始化质心的方法,默认"k-means++”
输入"k-means++":一种为K均值聚类选择初始聚类中心的聪明的办法,以加速收敛
如果输入了n维数组,数组的形状应该是(n_clusters,n_features)并给出初始质心
random_state:控制每次质心随机初始化的随机数种子
n_init:整数,默认10
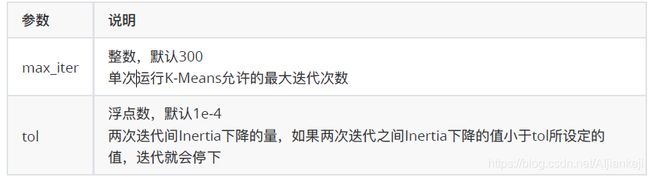
5、重要参数max_iter &tol
当质心不再移动,K-Means算法就会停下来。但在完全收敛之前,我们也可以使用max_iter,最大迭代次数,或者tol,两次迭代间Inertia下降的量,这两个参数来让迭代提前停下来。有时候,当我们的n_clusters选择不符合数据的自然分布,或者我们为了业务需求,必须要填入与数据的自然分布不合的n_clusters,提前让迭代停下来反而能够提升模型的表现。
五、基于密度的聚类算法:DBSCAN
K-Means是最常见的聚类方法,能够实现快速聚类,但局限于其算法构架,K-Means对非球形边界的数据很难达到一个较好的分类效果,因此我们需要借助另外的数学理理论工具对其进行进一步的完善。这里介绍一种利用密度进行聚类的方法:DBSCAN。
1、DBSCAN基本原理
DBSCAN是一种基于密度的聚类方法,旨在寻找被低密度区域分离的高密度区域。DBSCAN是一种简单、有效的基于密度的聚类算法,且包含了了基于密度的许多方法中的重要概念。
在基于中心的方法中,数据集中特定点的密度通过对该店Eps半径之内的点计数(包括点本身)来估计,如下图所示。点A的Eps半径内点的个数为7,包括A本身。该方法实现简单,但是点的密度取决于指定的半径。例如,如果半径足够大,则所有点的密度都等于数据集中的点数m。同理,如果半径太小,则所有点的密度都是1。对于低维数据,一种确定合适半径的方法在讨论DBSCAN算法时给出。
密度的基于中心的方法使得我们可以将点分类为(1)稠密区域内部的点(核心点),(2)稠密区域边缘上的点(边界点),(3)稀疏区域中的点(噪声或背景点)。下图使用二维点集图示了核心点、边界点和噪声点的概念。下文给出更详尽的描述。

核心点(core point):这些点在基于密度的簇内部。点的领域由距离函数和用户指定的距离参数Eps决定。核心点的定义是,如果该点的给定领域内的点的个数超过给定的阈值MinPts,其中MinPts也是一个用户指定的参数。在上图中,如果MinPts≤7,则对于给定的半径(Eps),点A是核心点。
边界点(border point):边界点不是核心点,但它落在某个核⼼心点的领域内。在上图中,点B是边界点。边界点可能落在多个核心点的领域内。
噪声点(noise point):噪声点是非核心点也非核心点也非边界点的任何点。在上图中,点C是噪声点。
2、DBSCAN算法执行过程
给定核心点、边界点和噪声点的定义,DBSCAN算法可以非正式地描述如下。任意两个足够靠近(相互之间的距离在Eps之内)的核心点将放在同一个簇中。同样,任何与核心点足够靠近的边界点也放到与核心点相同的簇中。(如果一个边界点靠近不同簇的核心点,则可能需要解决平局问题。)噪声点被丢弃。
聚类分析:DBSCAN算法
- 将所有点标记为核⼼心点、边界点或噪声点
- 删除噪声点
- 为距离在Eps之内的所有核⼼心点之间赋予⼀一条边
- 每个彼此联通的核⼼心点组成⼀一个簇
- 将每个边界点指派到⼀一个与之关联的核⼼心点的簇当中
当然,还有如何确定参数Eps和MinPts的问题。基本方法是观察点到它的 K个最近邻的距离(称为K-距离)的特性。对于属于某个簇的点,如果K 不大于簇的大小,则K-距离将很小。注意,尽管因簇的密度和点的随机分布不同而有变化,但是如果簇密度的差异不是很极端的话,在平均情况下变化不会太大。然而,对于不在簇中的点(如噪声点),K -距离将相对较大。因此,如果我们对于某个 K,计算所有点的K-距离,以递增次序将它们排序,然后绘制排序后的值,则我们会看到K-距离的急剧变化,对应于合适的Eps值。如果我们选取该距离为Eps参数,而取K 的值为MinPts参数,则K-距离小于Eps的点将被标记为核心点,而其他点将被标记为噪声或边界点。
3、sklearn实践
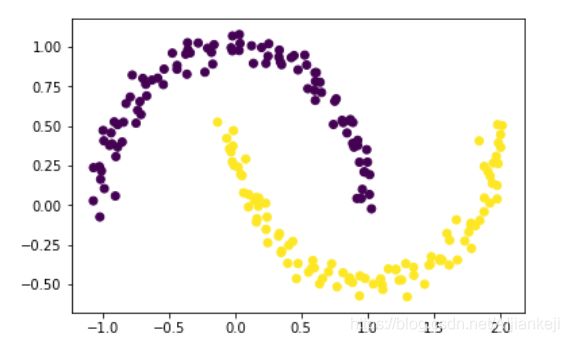
为了更好的对比K-Means快速聚类和DBSCAN聚类,此处利用sklearn生成一个非线性边界的数据集。这里需要注意,sklearn提供了了非常丰富的生成数据的方法,用以在无外部数据集的情况下测试模型性能,该功能主要由datasets 模块提供。此处利用该模块的make_moons方法生成非线性边界的数据集。
①K-Means聚类实践
from sklearn.datasets import make_moons
X,y = make_moons(200,noise=0.05,random_state=0)
plt.scatter(X[:,0],X[:,1],c=y)
from sklearn.cluster import KMeans
kmeans = KMeans(n_clusters=2)
kmeans.fit(X)
#查看训练集数据所属簇划分情况
labels = kmeans.labels_
labels
#查看聚类结果的中心点
centers= kmeans.cluster_centers_
centers
#利用可视化图形查看最终聚类结果
plt.scatter(X[:,0],X[:,1],c=labels)
plt.plot(centers[:,0],centers[:,1],'ro')

很明显K-Means并没有准确的捕捉数据集背后客观分类规律,接下来尝试用DBSCAN进行聚类。
②DBSCAN聚类实践
使用DBSCAN对上述数据集进行聚类,在调用sklearn中DBSCAN算法时,需要设置eps半径长度以及核心点的判别条件。
from sklearn.cluster import DBSCAN
db = DBSCAN(eps=0.3) # 设置半径
db.fit(X)
db.labels_ # 查看各点所属类
#图形可视化查看聚类结果
plt.scatter(X[:,0],X[:,1],c=db.labels_)

能够看出,DBSCAN成功捕捉数据集分类结构。